一种贮运装置的制作方法
本技术涉及一种基于机器视觉识别控制水表自动贮运装置。
背景技术:
1、传统的车间产线物料配送或者水表检测过程中水表配送至检验平台处大都是采用人工手推物料车或人工驾驶叉车叉取物料的形式,又或者产线与产线之间通过传统的输送线连接进行物料的输送或转运。存在着人工操作物料车或驾驶叉车效率低,出错率高,且企业招聘人员多,造成人力成本高;并且车间产线物料配送不及时,可能造成产线缺料停线的情况发生,影响生产效率。
2、随着科技的发展,现有的车间搬运中通常会使用搬运机器人(贮运装置)进行搬运,具体的通过应用搬运机器人视觉导航实现自动行走、定位、搬运等功能,如中国专利申请号:201810915933.1公开了用于机器人按照规划路径自主行走,所述自定位方法包括以下步骤:将机器人行走导航路径上的交叉路口作为节点进行编号,并根据每个节点编号对应的二进制编码设计相应二维码的编码图案,将二维码的编码图案平铺在与之对应的交叉路口节点处;利用导航路径对应的电子地图并基于迪杰斯特拉算法规划出机器人从起始点到目标点的最短路径,该最短路径包含了所要依次经过的交叉路口节点编号;机器人利用机身固定的摄像头实时观测行走路线上的导航图像,并对设置在交叉路口处二维码进行识别,获得对应的节点编号;将摄像头获取的连续帧视频节点图像识别出的相同的节点编号结果作为最终的定位节点编号,根据导航路径对应的电子地图进行实现机器人的自主定位。
3、本申请人在投入使用中发现,贮运装置的搬运机械手均是固定于底座上,并通过底座上设置行走组件实现行走、转弯;在通过坑洼路面易造成水表的损坏或者掉落,使用的安全性较差。
4、而使用如中国专利申请号:201911088893.9公开了一种基于视触融合的室外移动机器人地形识别方法,其针对室外复杂的非结构化地形,视触融合的方法充分地利用多种模态信息,在空间和时间上将互补与冗余信息依据某种优化准则组合起来,形成视触觉信息的优势互补,来提高室外移动机器人地形识别的准确率;并且将视触觉特征融合起来,实现了特征维数的融合约简,并利用宽度学习分类器获得了地形识别结果,为室外移动机器人地形识别任务提供了一个高效的宽度结构,具有良好的分类性能和泛化性能。如此,使得贮运装置能够快速、准备的识别路面信息,传统的方式是通过命令贮运装置避开坑洼路面,但是,存储水表的仓库较为拥挤,通常仅留出单条通道用于工作人员或者贮运装置通行,使得贮运装置在识别路面坑洼状况时也无法进行避让,而在通过坑洼路面易造成水表的损坏或者掉落,使用的安全性较差。
技术实现思路
1、因此,针对上述的问题,本实用新型提供一种贮运装置,它主要解决了现有技术中适用于水表运输的贮运装置的使用安全性差的问题。
2、为实现上述目的,本实用新型采用了以下技术方案:
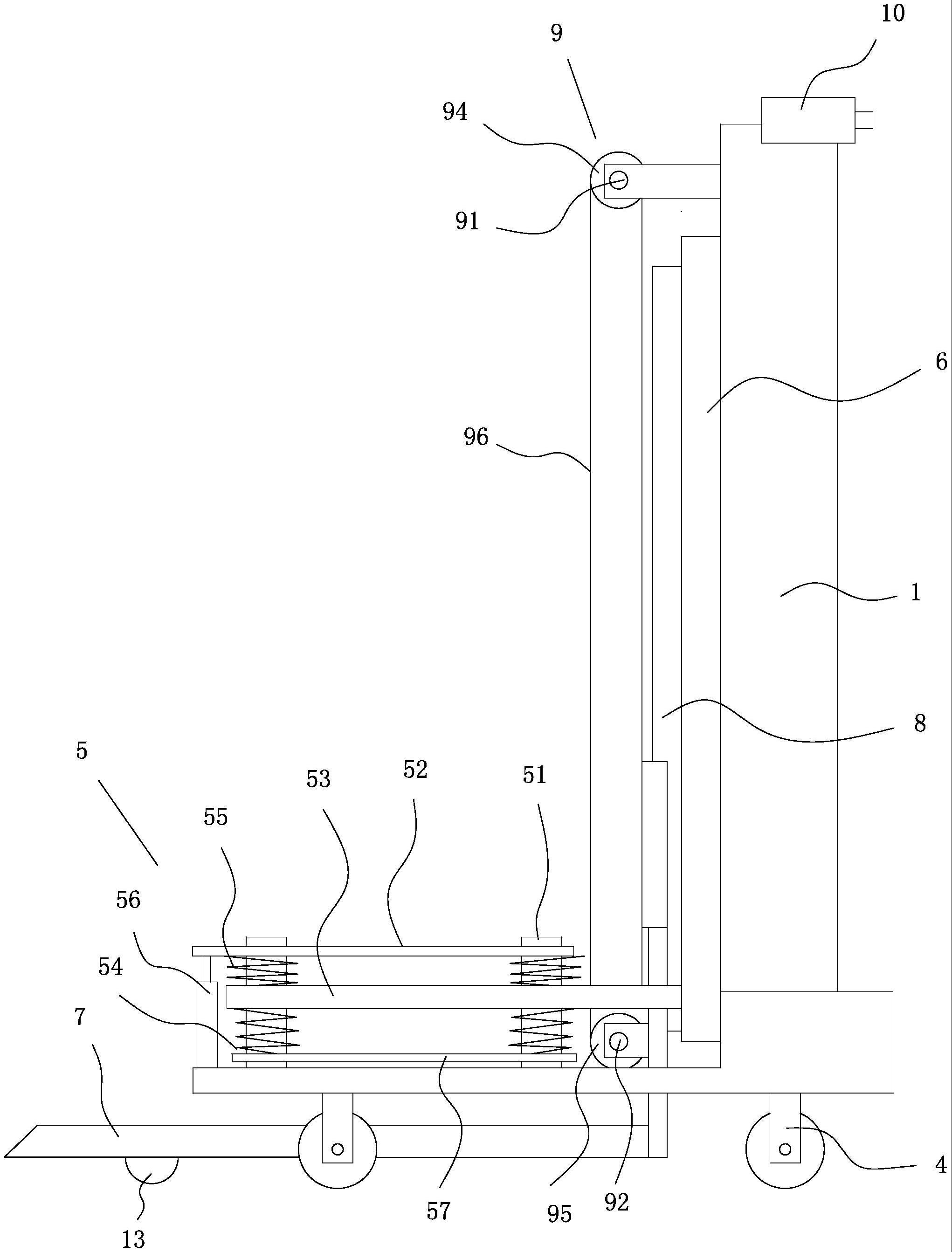
3、一种贮运装置,包括底座、设于底座上的控制装置、蓄电池、行走组件、减震组件、货叉架、货叉、导向组件、驱动组件和工业相机,所述行走组件设于底座的下部用于驱动底座行走、转弯,所述货叉架通过减震组件设于底座上,所述减震组件包括设于底座上的支撑杆、设于支撑杆上且沿支撑杆滑动的第一支撑座和第二支撑座、套设于支撑杆上且位于第一支撑座与底座之间的第一弹簧、位于第一支撑座与第二支撑座之间的第二弹簧以及驱动第二支撑座沿支撑杆滑动的电推缸,所述导向组件设于货叉架上,所述货叉设于导向组件上,所述驱动组件设于货叉架上且与货叉连接,实现货叉沿导向组件上下运动,所述工业相机设于货叉架的上端,所述控制装置分别与蓄电池、电推缸、工业相机、行走组件和驱动组件电连接。
4、进一步的,所述支撑柱上且位于第一弹簧的下端套设有滑动座,所述滑动座与底座之间设有压力传感器。
5、进一步的,所述驱动组件包括可转动地设于货叉架下端的第一转轴、可转动地设于货叉架上端的第二转轴、驱动第一转轴转动的驱动电机、分别设于第一转轴和第二转轴上的主动链轮和从动链轮以及缠绕于主动链轮和从动链轮上的链条,所述货叉与链条固定连接。
6、进一步的,所述货叉的下端设有滚轮。
7、进一步的,所述底座上设有触摸屏、断电开关、启停按钮、急停按钮,所述触摸屏、断电开关、启停按钮、急停按钮分别与控制装置电连接。
8、进一步的,所述底座上设有红外线传感器。
9、通过采用前述技术方案,本实用新型的有益效果是:本贮运装置,通过控制装置接收工业相机识别并获取外部二维码数据,并控制行走组件驱动底座行走、转弯实现运输,同时工业相机获取底面的图片数据,判断路面的起伏坡度,通过控制电推缸带动第二支撑座沿支撑柱运动,使得第一支撑座与第二支撑座之间的距离以及第二支撑座与底座之间的距离发生变化,从而实施调节第一弹簧和第二弹簧的压缩阻尼,使得第二支撑座上的摆动处于动态平衡,进而调节货叉的运输的水表保持平衡,避免水表在输送中颠簸造成损坏或者掉落,提高贮运装置使用的安全性。
技术特征:
1.一种贮运装置,其特征在于:包括底座、设于底座上的控制装置、蓄电池、行走组件、减震组件、货叉架、货叉、导向组件、驱动组件和工业相机,所述行走组件设于底座的下部用于驱动底座行走、转弯,所述货叉架通过减震组件设于底座上,所述减震组件包括设于底座上的支撑杆、设于支撑杆上且沿支撑杆滑动的第一支撑座和第二支撑座、套设于支撑杆上且位于第一支撑座与底座之间的第一弹簧、位于第一支撑座与第二支撑座之间的第二弹簧以及驱动第二支撑座沿支撑杆滑动的电推缸,所述导向组件设于货叉架上,所述货叉设于导向组件上,所述驱动组件设于货叉架上且与货叉连接,实现货叉沿导向组件上下运动,所述工业相机设于货叉架的上端,所述控制装置分别与蓄电池、电推缸、工业相机、行走组件和驱动组件电连接。
2.根据权利要求1所述的贮运装置,其特征在于:所述支撑杆上且位于第一弹簧的下端套设有滑动座,所述滑动座与底座之间设有压力传感器。
3.根据权利要求1或2所述的贮运装置,其特征在于:所述驱动组件包括可转动地设于货叉架下端的第一转轴、可转动地设于货叉架上端的第二转轴、驱动第一转轴转动的驱动电机、分别设于第一转轴和第二转轴上的主动链轮和从动链轮以及缠绕于主动链轮和从动链轮上的链条,所述货叉与链条固定连接。
4.根据权利要求3所述的贮运装置,其特征在于:所述货叉的下端设有滚轮。
5.根据权利要求4所述的贮运装置,其特征在于:所述底座上设有触摸屏、断电开关、启停按钮、急停按钮,所述触摸屏、断电开关、启停按钮、急停按钮分别与控制装置电连接。
6.根据权利要求5所述的贮运装置,其特征在于:所述底座上设有红外线传感器。
技术总结
本技术涉及一种贮运装置,它主要解决了现有技术中适用于水表运输的贮运装置的使用安全性差的问题,包括底座、设于底座上的控制装置、蓄电池、行走组件、减震组件、货叉架、货叉、导向组件、驱动组件和工业相机,行走组件设于底座的下部,货叉架通过减震组件设于底座上,减震组件包括设于底座上的支撑杆、第一支撑座、第二支撑座、第一弹簧、第二弹簧以及驱动第二支撑座沿支撑杆滑动的电推缸,所述导向组件设于货叉架上,所述货叉设于导向组件上,所述驱动组件设于货叉架上且与货叉连接,实现货叉沿导向组件上下运动,所述工业相机设于货叉架的上端。
技术研发人员:陈一如,詹永光,蔡东莹,赖永斌,林文清
受保护的技术使用者:泉州市水务水表检验有限公司
技术研发日:20221109
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!