一种机器人贴胶头的制作方法
1.本实用新型涉及贴胶设备,尤其是一种机器人贴胶头。
背景技术:
2.目前背光行业大多数用于贴胶工艺的设备都是针对卷料使用,采用小型剥料机进行剥胶,人工贴附工艺,但对于大批量生产的产品,显然不能满足这种工艺生产,而且所贴有的形状各异,长短不一,需要的人工数量较多,而目前在这种人工短缺、人工成本较高的社会环境影响下,企业的压力也是很大的。另外,即使现有的一些贴胶设备能用机器人来贴,但也只能满足贴短小而规则的胶条,且只能正面贴,对于内侧或异型胶,仍然是一大瓶颈。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种机器人贴胶头,能满足不同朝向面的贴胶。
4.为解决上述技术问题,本实用新型的技术方案是:一种机器人贴胶头,包括对接板和设在对接板两端的贴胶臂,所述对接板上设有连接头,所述贴胶臂包括贴胶吸盘组件、驱动贴胶吸盘组件翻转的翻转驱动机构、驱动翻转驱动机构升降的升降驱动机构和第一安装板,所述升降驱动机构设在第一安装板上。本实用新型原理:升降驱动机构驱动贴胶吸盘组件向下移动;贴胶吸盘组件吸取胶条;升降驱动机构驱动贴胶吸盘向上移动;机器人将贴胶头移动至贴胶工位;根据贴胶面的位置,翻转驱动机构驱动贴胶吸盘翻转一定角度并与贴胶面对准,最后升降驱动机构驱动贴胶吸盘组件靠近贴胶面并将胶条贴在铁框上,完成贴胶。
5.作为改进,所述升降驱动机构包括升降气缸。
6.作为改进,所述翻转驱动机构包括第二安装板、设在第二安装板上的翻转座、与翻转座枢接的翻转轴和驱动翻转轴旋转的翻转气缸,所述升降驱动机构作用在第二安装板上,所述翻转气缸的伸缩杆与翻转轴连接,翻转气缸的缸体通过铰接座固定在固定板上,所述固定板与第二安装板连接。
7.作为改进,所述固定板呈l形,其包括横板和立板,所述立板与第二安装板连接,所述铰接座设在横板的一端,所述横板的另一端设有长形孔并通过螺栓与立板连接。
8.作为改进,所述翻转轴包括两个设在第二安装板上的轴承座。
9.作为改进,所述翻转轴通过连接块与连接板连接,所述连接板与吸盘组件之间设有导线柱,所述导线柱外设有弹簧,所述连接块设在两个轴承座之间。
10.作为改进,所述第二安装板上设有对连接块限位的限位螺栓。
11.本实用新型与现有技术相比所带来的有益效果是:
12.根据贴胶面的位置,翻转驱动机构驱动贴胶吸盘翻转一定角度并与贴胶面对准,最后升降驱动机构驱动贴胶吸盘组件靠近贴胶面并将胶条贴在铁框上,完成贴胶,能满足
不同朝向面的贴胶。
附图说明
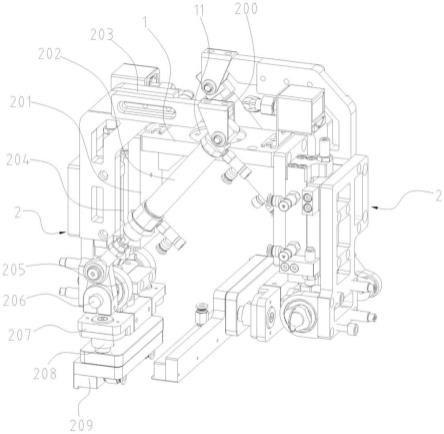
13.图1为本实用新型结构示意图。
14.图2为贴胶臂示意图。
具体实施方式
15.下面结合说明书附图对本实用新型作进一步说明。
16.如图1、2所示,一种机器人贴胶头,与机器人连接,实现多自由度的贴胶。所述贴胶头包括对接板1和设在对接板1两端的贴胶臂2;所述对接板1上设有连接头11,用于与机器人对接。所述贴胶臂2包括贴胶吸盘组件209、驱动贴胶吸盘组件209翻转的翻转驱动机构、驱动翻转驱动机构升降的升降驱动机构和第一安装板201。所述升降驱动机构设在第一安装板201上,第一安装板201与连接板1垂直,所述升降驱动机构为升降气缸204,所述升降气缸204倒置固定在第一安装板201上,升降气缸204的伸缩杆与翻转驱动机构连接,通过升降气缸204带动翻转驱动机构,进而带动贴胶吸盘组件209升降。所述翻转驱动机构包括第二安装板213、设在第二安装板213上的翻转座205、与翻转座205枢接的翻转轴206和驱动翻转轴206旋转的翻转气缸202;所述升降气缸204作用在第二安装板213上,所述翻转气缸202的伸缩杆与翻转轴206连接,翻转气缸202的缸体通过铰接座200固定在固定板203上,所述固定板203与第二安装板213连接,升降气缸204通过第二安装板213带动整个翻转驱动机构升降;所述固定板203呈l形,其包括横板和立板,所述立板与第二安装板213连接,所述铰接座200设在横板的一端,所述横板的另一端设有长形孔并通过螺栓与立板连接,通过长形孔调节横板的位置,进而调节翻转气缸202的安装位置;所述翻转轴206包括两个设在第二安装板213上的轴承座,翻转轴206通过轴承座固定和枢接;所述翻转轴206通过连接块211与连接板207连接,所述连接板207与贴胶吸盘组件209之间设有导线柱208,所述导线柱208外设有弹簧210,所述连接块211设在两个轴承座之间,弹簧210具有缓冲力,贴胶时具有缓冲作用,避免碰撞;所述第二安装板213上设有对连接块211限位的限位螺栓212,可以限制翻转轴206的翻转角度。所述贴胶吸盘组件209包括贴胶板和设在贴胶板上的真空吸盘。
17.本实用新型原理:升降驱动机构驱动贴胶吸盘组件209向下移动;贴胶吸盘组件209吸取胶条;升降驱动机构驱动贴胶吸盘向上移动;机器人将贴胶头移动至贴胶工位;根据贴胶面的位置,翻转驱动机构驱动贴胶吸盘翻转一定角度并与贴胶面对准,最后升降驱动机构驱动贴胶吸盘组件209靠近贴胶面并将胶条贴在铁框上,完成贴胶。
技术特征:
1.一种机器人贴胶头,其特征在于:包括对接板和设在对接板两端的贴胶臂,所述对接板上设有连接头,所述贴胶臂包括贴胶吸盘组件、驱动贴胶吸盘组件翻转的翻转驱动机构、驱动翻转驱动机构升降的升降驱动机构和第一安装板,所述升降驱动机构设在第一安装板上。2.根据权利要求1所述的一种机器人贴胶头,其特征在于:所述升降驱动机构包括升降气缸。3.根据权利要求1所述的一种机器人贴胶头,其特征在于:所述翻转驱动机构包括第二安装板、设在第二安装板上的翻转座、与翻转座枢接的翻转轴和驱动翻转轴旋转的翻转气缸,所述升降驱动机构作用在第二安装板上,所述翻转气缸的伸缩杆与翻转轴连接,翻转气缸的缸体通过铰接座固定在固定板上,所述固定板与第二安装板连接。4.根据权利要求3所述的一种机器人贴胶头,其特征在于:所述固定板呈l形,其包括横板和立板,所述立板与第二安装板连接,所述铰接座设在横板的一端,所述横板的另一端设有长形孔并通过螺栓与立板连接。5.根据权利要求3所述的一种机器人贴胶头,其特征在于:所述翻转轴包括两个设在第二安装板上的轴承座。6.根据权利要求5所述的一种机器人贴胶头,其特征在于:所述翻转轴通过连接块与连接板连接,所述连接板与吸盘组件之间设有导线柱,所述导线柱外设有弹簧,所述连接块设在两个轴承座之间。7.根据权利要求6所述的一种机器人贴胶头,其特征在于:所述第二安装板上设有对连接块限位的限位螺栓。
技术总结
一种机器人贴胶头,包括对接板和设在对接板两端的贴胶臂,所述对接板上设有连接头,所述贴胶臂包括贴胶吸盘组件、驱动贴胶吸盘组件翻转的翻转驱动机构、驱动翻转驱动机构升降的升降驱动机构和第一安装板,所述升降驱动机构设在第一安装板上。本实用新型原理:升降驱动机构驱动贴胶吸盘组件向下移动;贴胶吸盘组件吸取胶条;升降驱动机构驱动贴胶吸盘向上移动;机器人将贴胶头移动至贴胶工位;根据贴胶面的位置,翻转驱动机构驱动贴胶吸盘翻转一定角度并与贴胶面对准,最后升降驱动机构驱动贴胶吸盘组件靠近贴胶面并将胶条贴在铁框上,完成贴胶,能满足不同朝向面的贴胶。能满足不同朝向面的贴胶。能满足不同朝向面的贴胶。
技术研发人员:郑国伟
受保护的技术使用者:惠州市木子森科技有限公司
技术研发日:2022.11.21
技术公布日:2023/3/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1