一种分体式机器人拆码垛设备的制作方法
本技术涉及转运装置,尤其涉及一种分体式机器人拆码垛设备。
背景技术:
1、分体式机器人拆码垛设备是一种由多种设备组成的自动化拆码垛装置,主要应用于包装行业中替代人工进行货物转运,其主要由机械臂、输送带和码垛夹具组成,其中,码垛夹具是用于卸垛和码垛的设备。
2、目前常见的码垛夹具主要有吸盘式和夹持式夹具,为防止移动过程中货物脱落,大多码垛夹具会设置防脱夹爪托住货物下方对货物进行保护,而目前最常用的防脱夹爪为转动式结构,并且为避免夹爪影响夹具夹持货物,夹爪的转动行程较长,造成装置对货物底部进行防脱保护的空窗期较长,不利于对货物进行保护,具有改进空间。
技术实现思路
1、本部分的目的在于概述本实用新型的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
2、鉴于上述现有拆码垛夹具使用的转动式夹爪行程较长,对货物底部进行防脱保护的空窗期较长,不利于保护货物的问题,提出了本实用新型。
3、因此,本实用新型目的是提供一种分体式机器人拆码垛设备,其用于解决现有拆码垛夹具使用的转动式夹爪行程较长,对货物底部进行防脱保护的空窗期较长,不利于保护货物等问题。
4、为解决上述技术问题,本实用新型提供如下技术方案:一种分体式机器人拆码垛设备,包括:
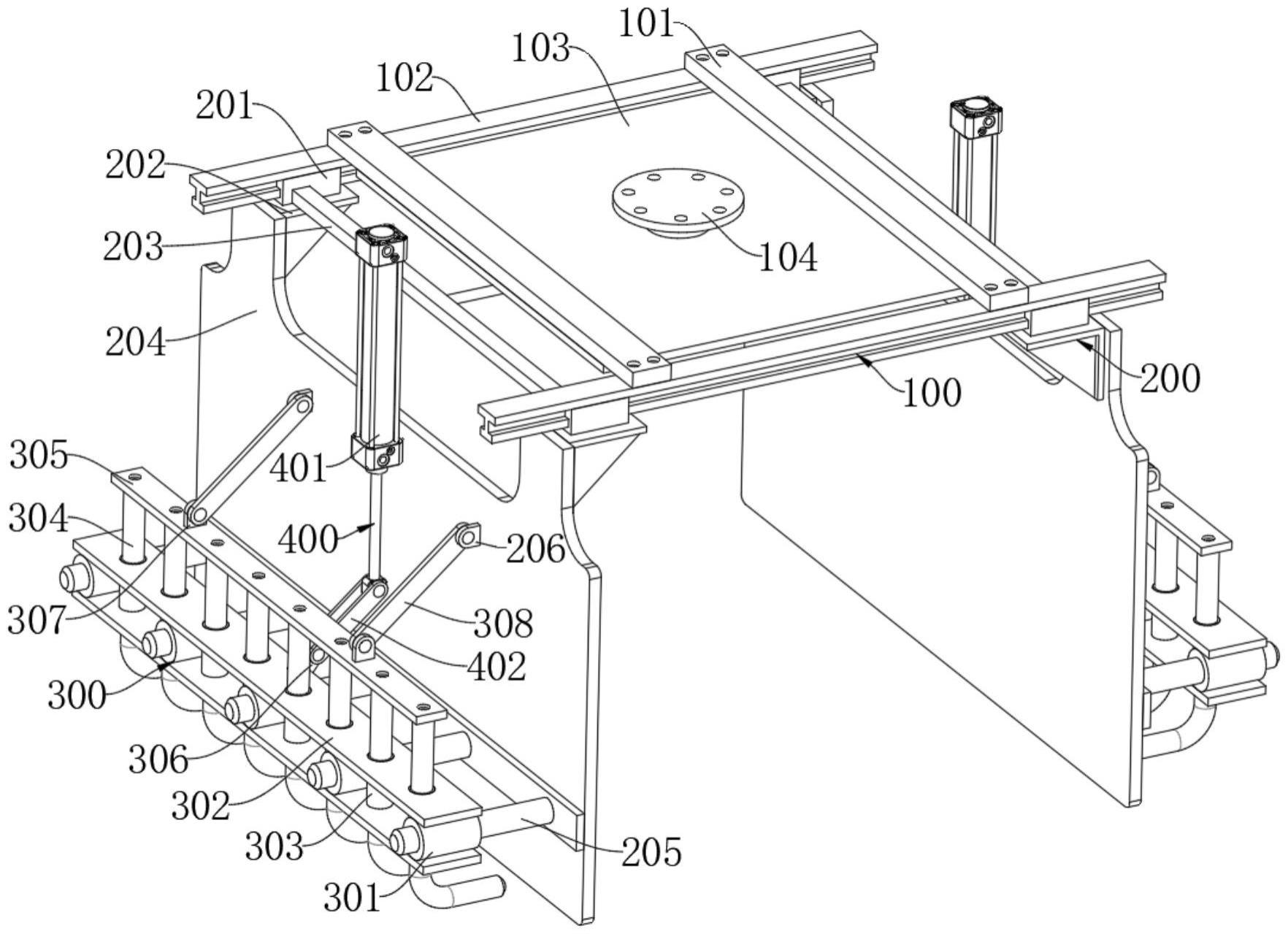
5、安装框架,其包括固定板条、滑轨、安装板和连接法兰,所述固定板条和滑轨均设置有两组,两组所述固定板条平行设置,两组所述滑轨均与两组固定板条底部固定连接并且垂直于固定板条设置,所述安装板与两组固定板条底部固定连接并且设置在两组滑轨之间,所述连接法兰固定连接在安装板顶部中心;
6、夹持机构,其包括驱动组件和滑动设置在两组滑轨间的两组夹板,所述驱动组件设置在安装板底部,其用于驱动两组夹板移动,所述夹板外侧沿水平方向等距固定连接有多组滑柱,所述夹板外侧沿水平方向还固定连接有两组位置对称的一级耳板;
7、防脱落机构,两组所述夹板均配合有防脱落机构,其包括一级滑筒,所述一级滑筒顶部与底部均设置有同步板条,所述同步板条与各组一级滑筒固定连接,两组所述同步板条之间沿同步板条长度方向等距设置有多组二级滑筒,所述二级滑筒两端分别与两组同步板条固定连接并且贯穿同步板条,各组所述二级滑筒内侧均滑动连接有l形夹爪,所述l形夹爪顶端穿过二级滑筒,所述l形夹爪上方设置有连接板,所述连接板底部与各组l形夹爪顶端固定连接,所述l形夹爪底端朝向夹板设置,位于上方的一组所述同步板条靠近夹板一侧的中部固定连接有二级耳板,所述连接板顶部固定连接有两组三级耳板,两组所述三级耳板位置分别与两组一级耳板位于同一竖直面上并且位于一级耳板下方,两组所述三级耳板均配合有推拉板条,所述推拉板条两端分别与三级耳板及对应的一级耳板铰接;
8、驱动机构,两组所述夹持机构均配合有驱动机构,其用于驱动一级滑筒移动。
9、作为本实用新型所述一种分体式机器人拆码垛设备的一种优选方案,其中:所述驱动组件包括滑动件和驱动件,两组所述夹板均配合有滑动件,其包括滑块、角钢、连接杆和夹板,所述滑块设置有两组,两组所述滑块分别与两组滑轨滑动连接,两组所述滑块底部均固定连接有角钢,所述连接杆两端分别与两组滑块固定连接,所述夹板与角钢侧壁固定连接,所述驱动件固定连接在安装板底部,其用于驱动两组安装板同向或反向移动。
10、作为本实用新型所述一种分体式机器人拆码垛设备的一种优选方案,其中:所述驱动件包括背靠背气缸,所述背靠背气缸固定连接在安装板底部,所述背靠背气缸两侧活塞杆端部分别与两组滑动件的连接杆固定连接。
11、作为本实用新型所述一种分体式机器人拆码垛设备的一种优选方案,其中:所述驱动机构包括驱动气缸和驱动板条,所述驱动气缸固定连接在夹板外侧并且倒置在二级耳板上方,所述二级耳板两侧均设置有驱动板条,所述驱动板条两端分别与驱动气缸活塞杆端部以及二级耳板铰接。
12、作为本实用新型所述一种分体式机器人拆码垛设备的一种优选方案,其中:所述角钢内侧还具有加强筋。
13、作为本实用新型所述一种分体式机器人拆码垛设备的一种优选方案,其中:所述滑柱表面和二级滑筒内侧均抛光处理,所述夹板内侧具有防滑涂层。
14、本实用新型的有益效果:通过设置斜向移动的l形夹爪取代现有拆码垛夹具普遍使用的翻转式夹爪,缩短了移动行程,能够更快的对货物底部形成防护,缩短装置对货物防脱保护的空窗期,利于保护货物,降低因货物滑脱造成的损失。
15、附图说明
16、为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
17、图1为本实用新型一种分体式机器人拆码垛设备的立体结构示意图。
18、图2为本实用新型一种分体式机器人拆码垛设备的正视结构示意图。
19、图3为本实用新型一种分体式机器人拆码垛设备的仰视结构示意图。
20、图4为本实用新型一种分体式机器人拆码垛设备的侧视结构示意图。
技术特征:
1.一种分体式机器人拆码垛设备,其特征在于,包括:
2.如权利要求1所述的一种分体式机器人拆码垛设备,其特征在于:所述驱动组件包括滑动件和驱动件,两组所述夹板(204)均配合有滑动件,其包括滑块(201)、角钢(202)、连接杆(203)和夹板(204),所述滑块(201)设置有两组,两组所述滑块(201)分别与两组滑轨(102)滑动连接,两组所述滑块(201)底部均固定连接有角钢(202),所述连接杆(203)两端分别与两组滑块(201)固定连接,所述夹板(204)与角钢(202)侧壁固定连接,所述驱动件固定连接在安装板(103)底部,其用于驱动两组安装板(103)同向或反向移动。
3.如权利要求2所述的一种分体式机器人拆码垛设备,其特征在于:所述驱动件包括背靠背气缸(207),所述背靠背气缸(207)固定连接在安装板(103)底部,所述背靠背气缸(207)两侧活塞杆端部分别与两组滑动件的连接杆(203)固定连接。
4.如权利要求1所述的一种分体式机器人拆码垛设备,其特征在于:所述驱动机构(400)包括驱动气缸(401)和驱动板条(402),所述驱动气缸(401)固定连接在夹板(204)外侧并且倒置在二级耳板(306)上方,所述二级耳板(306)两侧均设置有驱动板条(402),所述驱动板条(402)两端分别与驱动气缸(401)活塞杆端部以及二级耳板(306)铰接。
5.如权利要求2或3所述的一种分体式机器人拆码垛设备,其特征在于:所述角钢(202)内侧还具有加强筋。
6.如权利要求1所述的一种分体式机器人拆码垛设备,其特征在于:所述滑柱(205)表面和二级滑筒(303)内侧均抛光处理,所述夹板(204)内侧具有防滑涂层。
技术总结
本技术公开了一种分体式机器人拆码垛设备,包括:安装框架、夹持机构和、防脱落机构和驱动组件,安装框架包括固定板条、滑轨和安装板,固定板条和滑轨均设置有两组,两组固定板条平行设置,两组滑轨均与两组固定板条底部固定连接并且垂直于固定板条设置,安装板与两组固定板条底部固定连接,夹持机构滑动设置在滑轨上,其用于夹持货物,防脱落机构与夹持机构配合用于卡住夹持机构下方进而防止货物脱落,驱动组件用于驱动防脱落机构,其有益效果为:通过设置斜向移动的L形夹爪取代现有拆码垛夹具普遍使用的翻转式夹爪,缩短了移动行程,能够更快的对货物底部形成防护,缩短装置对货物防脱保护的空窗期,利于保护货物。
技术研发人员:丛江涛,邾明明,沈佳
受保护的技术使用者:南京华设云信息技术有限公司
技术研发日:20221201
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!