一种钒氮合金成品自动卸料系统的制作方法
本技术具体涉及一种卸料系统,具体是一种钒氮合金成品自动卸料系统。
背景技术:
1、钒氮合金是钢材高效添加剂,它加入钢中可提高钢的耐磨性、强度、延展性、硬度及抗疲劳性等综合力学性能,并使钢具有良好的可焊接性能。尤其是在高强度、低合金钢、微合金钢以及其它特殊钢中,钒氮合金能有效地强化和细化晶粒,节约含钒原料,从而降低炼钢生产成本。国内大多数厂家均采用推板窑生产钒氮合金,推板窑窑内烧结时需要放置在石墨坩埚内,烧结完成后形成块状物,然而此时的块状钒氮合金形状不规则,目前钒氮合金成品卸料环节还仍然需要人工操作,操作工人每隔15-30分钟就要搬动重量达35-40kg的石墨坩埚和制成品一次,相当于每班要搬运3吨以上的重物,职工劳动强度大。另外,由于石墨坩埚外表非常光滑,如果搬动时不慎滑落将造成工人受伤和装备损坏,其脱落的石墨还会影响现场环境。
2、因此,亟需一种钒氮合金成品自动卸料系统。
技术实现思路
1、本实用新型的目的在于提供一种钒氮合金成品自动卸料系统,以解决上述背景技术中提出的目前钒氮合金成品卸料环节还仍然需要人工操作,操作工人每隔15-30分钟就要搬动重量达35-40kg的石墨坩埚和制成品一次,相当于每班要搬运3吨以上的重物,职工劳动强度大。另外,由于石墨坩埚外表非常光滑,如果搬动时不慎滑落将造成工人受伤和装备损坏,其脱落的石墨还会影响现场环境的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
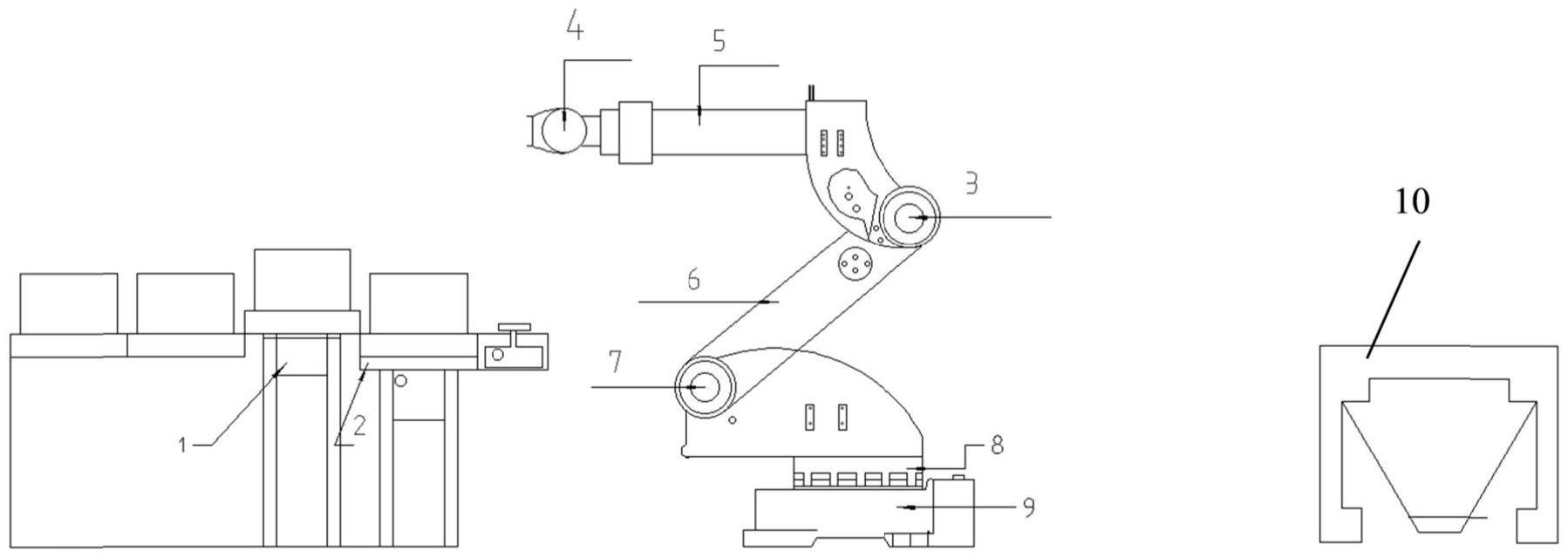
3、一种钒氮合金成品自动卸料系统,包括放置有至少一个石墨坩埚的循环架、料斗以及控制所述石墨坩埚移动、以使石墨坩埚内部成品物料倒入料斗中的机械手装置;所述机械手装置包括用于夹持石墨坩埚的坩埚夹具、控制所述坩埚夹具进行位置调节的机械臂组件以及用于安装所述机械臂组件的机械手底座。
4、作为本实用新型进一步的方案:所述机械臂组件包括机械手前臂和机械手后臂,所述机械手后臂的下端安装于所述机械手底座上,所述机械手后臂的上端与所述机械手前臂的一端转动连接,机械手前臂的另一端与所述坩埚夹具转动连接。
5、作为本实用新型再进一步的方案:所述机械手底座上还设置有有机械手轨道,所述机械手轨道上滑动安装有机械手滑动座,所述机械手滑动座与所述机械手后臂的下端转动连接。
6、作为本实用新型再进一步的方案:所述机械手底座上设置有调节所述机械手滑动座移动的线性调节机构。
7、作为本实用新型再进一步的方案:所述机械手滑动座上设置有调节所述机械手后臂转动的第一电机,所述机械手后臂通过机械臂后轴承与机械手滑动座转动连接;所述机械手后臂上安装有调节所述机械手前臂转动的第二电机,所述机械手前臂通过机械臂前轴承与机械手后臂转动连接;所述机械手前臂上安装有调节所述坩埚夹具转动的第三电机,所述机械手前臂通过连接轴承与所述坩埚夹具转动连接。
8、作为本实用新型再进一步的方案:所述循环架上安装有带动所述石墨坩埚上下移动的坩埚升降液压缸,用于控制待卸料的石墨坩埚升起。
9、作为本实用新型再进一步的方案:所述钒氮合金成品自动卸料系统还包括有对所述机械手装置进行控制的控制设备,所述控制设备包括有信号接收模块、信号处理模块和信号发送模块,其中:
10、信号接收模块,用于接收卸料信号,所述卸料信号为石墨坩埚到达指定位置时生成的位置信号,该位置信号可以由安装于循环架上的位置传感器生成;
11、信号处理模块,基于所述卸料信号生成控制信号,所述控制信号包括第一、第二、第三电机的转动信号和线性调节机构的移动信号;
12、信号发送模块,用于发送所述控制信号。
13、与现有技术相比,本实用新型的有益效果是:本实用新型设有放置有至少一个石墨坩埚的循环架、料斗以及控制所述石墨坩埚移动、以使石墨坩埚内部成品物料倒入料斗中的机械手装置,解决了推板窑生产钒氮合金成品卸料劳动强度大、效率低的难题,提高了钒氮合金产线自动化水平。
技术特征:
1.一种钒氮合金成品自动卸料系统,其特征在于,包括:
2.根据权利要求1所述的钒氮合金成品自动卸料系统,其特征在于,所述机械臂组件包括机械手前臂(5)和机械手后臂(6),所述机械手后臂(6)的下端安装于所述机械手底座(9)上,所述机械手后臂(6)的上端与所述机械手前臂(5)的一端转动连接,机械手前臂(5)的另一端与所述坩埚夹具(4)转动连接。
3.根据权利要求2所述的钒氮合金成品自动卸料系统,其特征在于,所述机械手底座(9)上还设置有机械手轨道(8),所述机械手轨道(8)上滑动安装有机械手滑动座,所述机械手滑动座与所述机械手后臂(6)的下端转动连接。
4.根据权利要求3所述的钒氮合金成品自动卸料系统,其特征在于,所述机械手底座(9)上设置有调节所述机械手滑动座移动的线性调节机构。
5.根据权利要求4所述的钒氮合金成品自动卸料系统,其特征在于,所述机械手滑动座上设置有调节所述机械手后臂(6)转动的第一电机,所述机械手后臂(6)通过机械臂后轴承与机械手滑动座转动连接。
6.根据权利要求5所述的钒氮合金成品自动卸料系统,其特征在于,所述机械手后臂(6)上安装有调节所述机械手前臂(5)转动的第二电机,所述机械手前臂(5)通过机械臂前轴承(3)与机械手后臂(6)转动连接。
7.根据权利要求6所述的钒氮合金成品自动卸料系统,其特征在于,所述机械手前臂(5)上安装有调节所述坩埚夹具(4)转动的第三电机,所述机械手前臂(5)通过连接轴承与所述坩埚夹具(4)转动连接。
8.根据权利要求1所述的钒氮合金成品自动卸料系统,其特征在于,所述循环架上安装有带动所述石墨坩埚(2)上下移动的坩埚升降液压缸(1),用于控制待卸料的石墨坩埚(2)升起。
技术总结
本技术公开了一种钒氮合金成品自动卸料系统,涉及一种卸料系统,包括放置有至少一个石墨坩埚的循环架、料斗以及控制石墨坩埚移动、以使石墨坩埚内部成品物料倒入料斗中的机械手装置;机械手装置包括用于夹持石墨坩埚的坩埚夹具、控制坩埚夹具进行位置调节的机械臂组件以及用于安装机械臂组件的机械手底座。本技术设有放置有至少一个石墨坩埚的循环架、料斗以及控制石墨坩埚移动、以使石墨坩埚内部成品物料倒入料斗中的机械手装置,解决了推板窑生产钒氮合金成品卸料劳动强度大、效率低的难题,提高了钒氮合金产线自动化水平。
技术研发人员:王乖宁,严飞,邓晓飞,唐琪,江滔,黎远辉,沙志忠,杨浩
受保护的技术使用者:攀钢集团钒钛资源股份有限公司
技术研发日:20221207
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!