一种自动码垛夹具的制作方法
本技术涉及码垛机器人设备领域,特别涉及一种自动码垛夹具。
背景技术:
1、码垛夹具一般设置在码垛设备或者码垛设备机械手臂的端部,用来夹取各种物品,完成搬运以及码垛的工作,目前,在进行码垛操作时,基本时采用人工进行码垛操作,人工式码垛存在劳动强度高,效率低、码垛不整齐、容易倒塌等问题,并且当包装箱物品较重时,包装箱会出现滑落情况,进而容易发生倒塌现象,因此需要在包装箱每码垛两至五层时,增加一张隔板,防止包装箱码垛出现倒塌的情况,现在一般通过人工进行操作,操作十分不方便,并且使用。
技术实现思路
1、为了克服现有技术存在的缺陷,本实用新型提供一种自动码垛夹具。
2、本实用新型解决其技术问题所采用的技术方案是:一种自动码垛夹具,包括支撑座,所述夹取模块设置在支撑座底部,所述夹板模块设置在支撑座的两侧,所述夹板模块包括摆动组件和夹取组件,所述摆动组件设置在支撑座两侧,所述夹取组件安装于摆动组件的一端,所述摆动组件包括摆动臂和摆臂驱动件,所述摆臂驱动件与所述摆动臂传动连接,所述摆臂驱动件驱动摆动臂沿支撑座两侧进行水平方向的摆动,以使夹取组件摆动至支撑座的下方。
3、本方案的进一步说明,所述夹取模块包括可开合的夹板和夹板驱动组件,所述夹板驱动组件控制夹板实现左右移动,所述夹板驱动组件包括主动轮、从动轮和传动带,所述夹板驱动组件输出端连接有主动轮,所述主动轮下方设置有从动轮,所述主动轮和从动轮之间设置有张紧轮,传动带套设在主动轮、两个从动轮上,张紧轮设置在传动带的外侧。
4、具体的,所述夹板拆分为固定夹板和移动夹板,所述固定夹板固定在支撑座的下方,所述移动夹板的上端沿左右方向滑动设置在支撑座的下方,所述移动夹板的一侧设置有横向杆,所述横向杆一端设置有驱动夹板,所述驱动夹板固定在传送带上,以使移动夹板通过驱动夹板沿着传动带进行左右移动。
5、更具体的,所述支撑座的下部设置的滑轨,所述移动夹板的上端设置有滑块,所述滑块滑动设置在所述滑轨上,以使移动夹板通过滑块沿着滑轨实现左右移动。
6、本方案的进一步说明,所述夹板模块的数量为两个,两个所述夹板模块分别设置在支撑座的相对侧,两个夹板模块结构一致。
7、本方案的进一步说明,所述夹板模块的数量为两个,两个所述夹板模块分别设置在支撑座的相对侧,两个所述夹板模块通过同步轴相连,两个夹板模块结构一致。
8、本方案的进一步说明,所述摆臂驱动件包括气缸,所述摆动臂包括了倾斜设置的倾斜段和左右延伸设置的水平段,所述气缸的输出端与倾斜段传动连接,所述夹取组件设置在所述水平段远离倾斜段的一端;
9、上述描述的气缸可替换油缸或市面上常规的液压驱动机构。
10、本方案的进一步说明,所述夹取组件包括相互铰接设置第一夹取片和第二夹取片、夹取摆臂驱动件,夹取摆臂驱动件为气缸或油缸等活动结构,所述第二夹取片固定设置在摆动臂一端,所述夹取摆臂驱动件驱动第一夹取片绕铰接处靠近或者远离所述第二夹取片。
11、本方案的进一步说明,所述支撑座上部设置有连接座,能通过连接座与机械手臂进行相连接,采用连接座连接方式能便于本夹具安装机械手结构上。
12、本实用新型的有益效果是:本实用新型的通过夹取模块对包装箱进行码垛操作,无需要采用人工对包装箱进行码垛操作,从而提升码垛时的工作效率,采用机械结构自动码垛时,能保证包装箱在堆叠时的整齐,后续通过夹板模块,能便于隔板拿取,无需再通过人工进行隔板拿取,能避免在放置隔板时避免包装箱出现倒塌的情况。
技术特征:
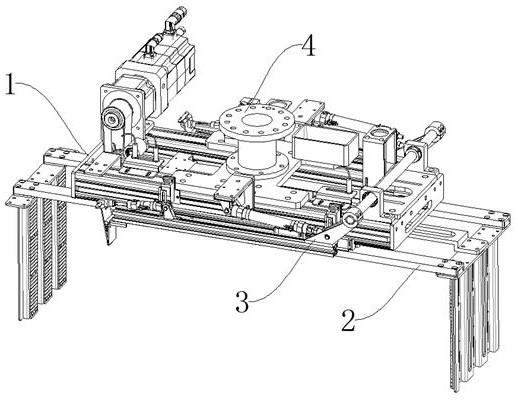
1.一种自动码垛夹具,包括支撑座(1),其特征在于,
2.根据权利要求1所述的一种自动码垛夹具,其特征在于:所述夹取模块(2)包括可开合的夹板和夹板驱动组件(21),所述夹板驱动组件(21)控制夹板实现左右移动,所述夹板驱动组件(21)包括主动轮(221)、从动轮(222)和传动带(223),所述夹板驱动组件(21)输出端连接有主动轮(221),所述主动轮(221)下方设置有从动轮(222),所述主动轮(221)和从动轮(222)之间设置有张紧轮(224),所述传动带(223)套设在主动轮(221)、两个从动轮(222)上,张紧轮(224)设置在传动带(223)的外侧。
3.根据权利要求2所述的一种自动码垛夹具,其特征在于:所述夹板拆分为固定夹板(23)和移动夹板(24),所述固定夹板(23)固定在支撑座(1)的下方,所述移动夹板(24)的上端沿左右方向滑动设置在支撑座(1)的下方,所述移动夹板(24)的一侧设置有横向杆(25),所述横向杆(25)一端设置有驱动夹板(26),所述驱动夹板(26)固定在传送带上,以使移动夹板(24)通过驱动夹板(26)沿着传动带(223)进行左右移动。
4.根据权利要求3所述的一种自动码垛夹具,其特征在于:所述支撑座(1)的下部设置的滑轨(11),所述移动夹板(24)的上端设置有滑块(12),所述滑块(12)滑动设置在所述滑轨(11)上,以使移动夹板(24)通过滑块(12)沿着滑轨(11)实现左右移动。
5.根据权利要求1所述的一种自动码垛夹具,其特征在于:所述夹板模块(3)的数量为两个,两个所述夹板模块(3)分别设置在支撑座(1)的相对侧,两个夹板模块(3)结构一致,两个所述夹板模块(3)通过同步轴(33)相连。
6.根据权利要求1所述的一种自动码垛夹具,其特征在于:所述摆臂驱动件(312)包括气缸(3121),所述摆动臂(311)包括了倾斜设置的倾斜段(3122)和左右延伸设置的水平段,所述气缸(3121)的输出端与倾斜段(3122)传动连接,所述夹取组件(32)设置在所述水平段远离倾斜段(3122)的一端。
7.根据权利要求1所述的一种自动码垛夹具,其特征在于:所述夹取组件(32)包括相互铰接设置第一夹取片(321)、第二夹取片(322)和夹取摆臂驱动件(323),所述第二夹取片(322)固定设置于所述摆动臂(311),所述夹取摆臂驱动件(323)驱动第一夹取片(321)绕铰接处靠近或者远离所述第二夹取片(322)。
8.根据权利要求1所述的一种自动码垛夹具,其特征在于:所述支撑座(1)上部设置有连接座(4)。
技术总结
本技术属于码垛机器人的技术领域,具体公开一种自动码垛夹具,包括支撑座,夹取模块设置在支撑座底部,夹板模块设置在支撑座的两侧,夹板模块包括摆动组件和夹取组件,摆动组件设置在支撑座两侧,夹取组件安装于摆动组件的一端,摆动组件包括摆动臂和摆臂驱动件,摆臂驱动件与摆动臂传动连接,摆臂驱动件驱动摆动臂沿支撑座两侧进行水平方向的摆动,通过夹取模块对包装箱进行码垛操作,无需要采用人工对包装箱进行码垛操作,从而提升码垛时的工作效率,采用机械结构自动码垛时,能保证包装箱在堆叠时的整齐,后续通过夹板模块,便于隔板拿取,无需再通过人工进行隔板拿取,能避免在放置隔板时避免包装箱出现倒塌的情况。
技术研发人员:张海涛,韩伟,梁志东,周茜
受保护的技术使用者:佛山信涵机器人自动化技术有限公司
技术研发日:20221208
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!