一种机械手取料治具机构的制作方法
本技术属于机器人治具,具体而言,涉及一种机械手取料治具机构。
背景技术:
1、随着我国经济的发展,现有生产制造的产品中,很多零件制造过程中或者完成时都要机械手进行辅助取放料;即,通过机械手带动一个取料治具进行取放料,从而提高工作效率,降低工人的劳动强度。
2、 而目前在定子铁芯的上下料过程中,一般通过机械手带动取料治具实现对定子铁芯的抓取和放下;其中取料治具的精度往往通过机械手自身的精度进行保证。中国实用新型专利申请公布说明书cn206913184u 公开了一种机械手取料模组机构,其中送入机构包括夹爪(取料治具)和机械手,机械手的一端固定于机架上,夹爪设置于机械手的另一端上,上下料时,机械手带动夹爪实现铁芯的抓取和放下,而夹爪只负责简单的抓取,其主要靠机械手实现定位;在实际操作时,这种靠机械手进行定位而夹爪只进行简单抓取任务的取料治具,当产品发生差异性变化时,很容易出现干涉撞机的问题,造成损失的同时,影响生产需求。
技术实现思路
1、为了解决现有技术存在的问题,本实用新型旨在提供一种机械手取料治具机构,本取料治具机构实现自定位,以减少工件产品发生差异性变化时导致的干涉撞机问题以及可进行缓冲和兼容产品高度误差。
2、为达到上述技术目的及效果,本实用新型通过以下技术方案实现:
3、一种机械手取料治具机构,包括夹取部和与所述夹取部组合使用的容置部;
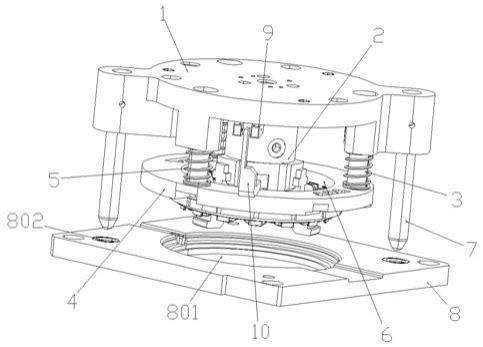
4、所述夹取部包括有浮动治具固定板,所述浮动治具固定板的下端面上设置有一竖直向下的夹爪气缸,所述浮动治具固定板的正下方通过至少三根导柱设置有一可上下浮动的压紧板,所述浮动治具固定板和所述压紧板之间的所述导柱上分别套设有一弹簧,所述压紧板的轴向中心开设有一上下端面贯通的通孔,所述夹爪气缸的夹爪分别穿设在所述通孔内,所述浮动治具固定板的下端面上还至少设置有两组定位柱,所述定位柱均匀绕设在所述浮动治具固定板四周;
5、所述容置部包括有一容置板,所述容置板上开设有用于容置产品的容置槽和用于与所述定位柱一一对应的定位孔。
6、进一步的,所述夹取部还包括有一对相互对称的u槽型光电开关和与所述u槽型光电开关一一对应设置的挡片,所述u槽型光电开关固定在所述浮动治具固定板的下端面,所述挡片固定在所述压紧板的上端面。
7、进一步的,所述夹爪气缸为气动三爪气缸。
8、进一步的,所述夹爪气缸的轴向中心线与所述通孔的轴线中心线重合。
9、进一步的,所述定位柱与所述浮动治具固定板可拆卸连接。
10、进一步的,所述定位柱呈圆柱状,所述定位柱的下端面四周倒有c角。
11、进一步的,所述导柱的横截面呈“t”型。
12、进一步的,所述导柱竖直穿设在所述浮动治具固定板内,且所述导柱的下端面延伸出所述浮动治具固定板的下端面后与所述压紧板固定连接,所述导柱在所述浮动治具固定板内可上下浮动。
13、本实用新型的有益效果如下:
14、1、本实用新型采用在取料治具中设置定位件,有效避免了因在产品生产中采用不同设备生产的产品间存在的误差大,而在抓取定位中出现的干涉问题,从而避免了干涉撞机的情况;
15、2、本实用新型采用可上下浮动的压紧板并通过弹簧控制对产品的下压动作,有效提升了夹取部缓冲和兼容产品高度误差的问题;
16、3、本实用新型结构简单,调试方便,机构可靠,提升了设备的稳定性。
17、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。本实用新型的具体实施方式由以下实施例及其附图详细给出。
技术特征:
1.一种机械手取料治具机构,其特征在于:包括夹取部和与所述夹取部组合使用的容置部;
2.根据权利要求1所述的机械手取料治具机构,其特征在于:所述夹取部还包括有一对相互对称的u槽型光电开关(9)和与所述u槽型光电开关(9)一一对应设置的挡片(10),所述u槽型光电开关(9)固定在所述浮动治具固定板(1)的下端面,所述挡片(10)固定在所述压紧板(4)的上端面。
3.根据权利要求1所述的机械手取料治具机构,其特征在于:所述夹爪气缸(2)为气动三爪气缸。
4.根据权利要求3所述的机械手取料治具机构,其特征在于:所述夹爪气缸(2)的轴向中心线与所述通孔(6)的轴线中心线重合。
5.根据权利要求1所述的机械手取料治具机构,其特征在于:所述定位柱(7)与所述浮动治具固定板(1)可拆卸连接。
6.根据权利要求5所述的机械手取料治具机构,其特征在于:所述定位柱(7)呈圆柱状,所述定位柱(7)的下端面四周倒有c角。
7.根据权利要求1所述的机械手取料治具机构,其特征在于:所述导柱(3)的横截面呈“t”型。
8.根据权利要求7所述的机械手取料治具机构,其特征在于:所述导柱(3)竖直穿设在所述浮动治具固定板(1)内,且所述导柱(3)的下端面延伸出所述浮动治具固定板(1)的下端面后与所述压紧板(4)固定连接,所述导柱(3)在所述浮动治具固定板(1)内可上下浮动。
技术总结
本技术公开了一种机械手取料治具机构,包括夹取部和容置部;夹取部包括有浮动治具固定板,浮动治具固定板的下端面上设置有一竖直向下的夹爪气缸,浮动治具固定板的正下方通过至少三根导柱设置有一压紧板,浮动治具固定板和压紧板之间的导柱上分别套设有一弹簧,压紧板的轴向中心开设有一通孔,夹爪气缸的夹爪分别穿设在通孔内,浮动治具固定板的下端面上还至少设置有两组定位柱,定位柱均匀绕设在浮动治具固定板四周;容置部包括有一容置板,容置板上开设有用于容置产品的容置槽和用于与定位柱一一对应的定位孔。本技术避免了干涉撞机,达到了缓冲和兼容产品高度误差,结构简单,调试方便,机构可靠,提升了设备的稳定性。
技术研发人员:金加剑
受保护的技术使用者:苏州恒地智能科技有限公司
技术研发日:20221213
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!