起重机精准定位运行装置的制作方法
本技术涉及起重机,具体的说,涉及了一种起重机精准定位运行装置。
背景技术:
1、随着科学技术的发展,很多行业对起重设备的自动化有较高要求,其中最基础的就是起重机设备运行的精准定位,以便于自动取料或指定位置加工作业。
2、传统起重机运行机构采用交流电机作为动力源,初步定位精度一般在速度的1/60左右,再通过多次点动来调整停止位置,影响工作效率,最终只能达到cm级定位精度。
3、而自动化对起重机的精度要求提高到mm级,仅仅从对交流电机的控制已经难以实现,原因在于:传统起重机采用交流电机、减速器和皮带进行驱动,车轮在惯性作用下存在打滑现象,容易产生误差;而起重机的宽度方向上没有任何限制,车轮与轨道的配合也常出现间隙误差。
技术实现思路
1、本实用新型的目的是针对现有技术的不足,从而提供一种能够消除车轮打滑引起的误差和车轮间隙引起的误差、具有较高的行走方向控制精度和宽度控制精度的起重机精准定位运行装置。
2、本实用新型的基本设计构思在于:通过齿轮和齿条的行进方式代替传统的行走轮行进方式,解决车轮打滑导致的误差;通过可调节水平间距的水平轮对轨道夹紧,解决宽度方向的车轮间隙误差。
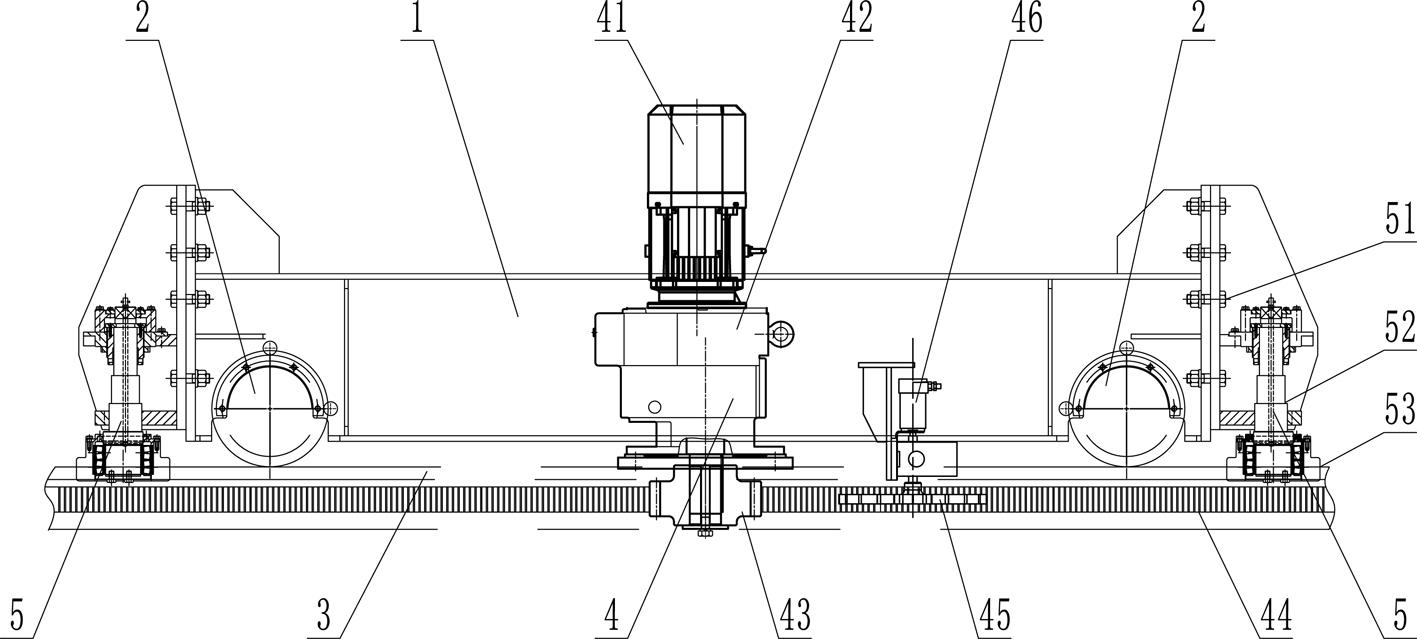
3、为了实现上述目的,本实用新型所采用的技术方案是:一种起重机精准定位运行装置,包括起重机本体、行走轮、轨道、行进方向精度控制机构和宽度方向间隙控制机构,所述起重机本体通过行走轮行走于轨道上;
4、所述行进方向精度控制机构包括伺服电机、减速器、输出齿轮、齿条、测速齿轮、编码器和plc,所述伺服电机安装于起重机本体的一侧,所述伺服电机通过减速器驱动输出齿轮转动,所述齿条安装于轨道的一侧,所述输出齿轮与齿条啮合以驱动起重机本体在行走轮的支撑下行进,所述测速齿轮安装于起重机本体上并与齿条啮合,所述编码器用于对测速齿轮进行测速,所述plc连接编码器以获取转速数据、并控制伺服电机的工作状态;
5、所述宽度方向间隙控制机构包括设置于起重机本体前部两侧和后部两侧的四组水平轮机构,每组水平轮机构包括两个可调整水平间距的水平轮,两水平轮夹持在轨道的两侧面。
6、基上所述,所述行走轮为非动力轮。
7、基上所述,所述水平轮机构还包括水平轮机架和偏心轴,所述水平轮机架安装于所述起重机本体的侧端,所述偏心轴安装于所述水平轮机架上,所述水平轮设置于偏心轴的偏心位置处。
8、基上所述,所述齿条通过螺栓安装于轨道的外侧面。
9、基上所述,所述输出齿轮和所述测速齿轮均水平设置。
10、基上所述,所述起重机本体设置有一套或两套所述行进方向精度控制机构,当有两套行进方向精度控制机构时,两套行进方向精度控制机构分别设置于起重机本体的两侧。
11、基上所述,所述输出齿轮的厚度大于测速齿轮的厚度。
12、基上所述,所述输出齿轮的直径小于测速齿轮的直径。
13、基上所述,四组所述宽度方向间隙控制机构分别设置于前方行走轮的前方外侧和后方行走轮的后方外侧。
14、基上所述,所述水平轮通过轴承安装在所述偏心轴上。
15、本实用新型相对现有技术具有实质性特点和进步,具体的说,本实用新型具有以下优点:
16、1.起重机的行走不再依赖于传统的电机驱动车轮行进的方式,而是改为电机驱动齿轮转动、齿轮与齿条配合实现行进的方式,这样可以避免车轮与轨道打滑导致的启停过程中出现的行进距离的计算误差。
17、2.在宽度方向上,增加四套前后均布、左右对称的水平轮机构,每组水平轮机构中的两个水平轮间距可调,能够从两侧将轨道夹紧,解决因车轮和轨道之间的间隙导致的横向误差。
18、3.通过对行进误差和横向误差的控制,使原来的cm级精度提升至mm级精度,为自动化作业打下精度基础。
19、4.水平轮机构采用偏心轴实现,水平调节只需要旋转偏心轴即可,才做简便。
20、5.测速过程利用测速齿轮和编码器实现,plc得到反馈的转速后,计算出行走路径,再控制伺服电机的状态,实现反馈-控制的闭环。
技术特征:
1.一种起重机精准定位运行装置,其特征在于:包括起重机本体、行走轮、轨道、行进方向精度控制机构和宽度方向间隙控制机构,所述起重机本体通过行走轮行走于轨道上;
2.根据权利要求1所述的起重机精准定位运行装置,其特征在于:所述行走轮为非动力轮。
3.根据权利要求1或2所述的起重机精准定位运行装置,其特征在于:所述水平轮机构还包括水平轮机架和偏心轴,所述水平轮机架安装于所述起重机本体的侧端,所述偏心轴安装于所述水平轮机架上,所述水平轮设置于偏心轴的偏心位置处。
4.根据权利要求3所述的起重机精准定位运行装置,其特征在于:所述齿条通过螺栓安装于轨道的外侧面。
5.根据权利要求4所述的起重机精准定位运行装置,其特征在于:所述输出齿轮和所述测速齿轮均水平设置。
6.根据权利要求5所述的起重机精准定位运行装置,其特征在于:所述起重机本体设置有一套或两套所述行进方向精度控制机构,当有两套行进方向精度控制机构时,两套行进方向精度控制机构分别设置于起重机本体的两侧。
7.根据权利要求5所述的起重机精准定位运行装置,其特征在于:所述输出齿轮的厚度大于测速齿轮的厚度。
8.根据权利要求7所述的起重机精准定位运行装置,其特征在于:所述输出齿轮的直径小于测速齿轮的直径。
9.根据权利要求8所述的起重机精准定位运行装置,其特征在于:四组所述宽度方向间隙控制机构分别设置于前方行走轮的前方外侧和后方行走轮的后方外侧。
10.根据权利要求3所述的起重机精准定位运行装置,其特征在于:所述水平轮通过轴承安装在所述偏心轴上。
技术总结
本技术提供了一种起重机精准定位运行装置,包括起重机本体、行走轮、轨道、行进方向精度控制机构和宽度方向间隙控制机构;行进方向精度控制机构包括伺服电机、减速器、输出齿轮、齿条、测速齿轮、编码器和PLC,伺服电机安装于起重机本体的一侧,伺服电机通过减速器驱动输出齿轮转动,齿条安装于轨道的一侧,输出齿轮与齿条啮合,测速齿轮安装于起重机本体上并与齿条啮合,编码器用于对测速齿轮进行测速;宽度方向间隙控制机构包括四组水平轮机构,每组水平轮机构包括两个可调整水平间距的水平轮,两水平轮夹持在轨道的两侧面。该装置能够消除车轮打滑引起的误差和车轮间隙引起的误差、具有较高的行走方向控制精度和宽度控制精度。
技术研发人员:葛立新,魏永顺,时清华,王朋启,周承铭,董燕燕,宋平
受保护的技术使用者:辽宁华原重型装备有限公司
技术研发日:20221214
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!