一种模组抓手的制作方法
本技术涉及电池生产,特别是一种模组抓手。
背景技术:
1、在电芯模组搬运过程中,一般是使用模组抓手,通过抓夹或者是夹板将电芯模组进行直接抱夹进行搬运,电池的构造有外壳、中端板等部件组成,当电芯模组的有分开的中端板时,该种电芯模组夹具无法对中端板进行夹取,需要依靠人工进行搬运,或者是依靠专门中端板机构进行搬运,所以在电芯模组搬运过程中就要花费更多的人力资源或者是更多的机械设备,容易造成人力、财力的资源的更多的耗费。
技术实现思路
1、本实用新型的目的在于提供一种模组抓手,能够解决在电芯模组夹取的过程中无法夹取中端板的问题。
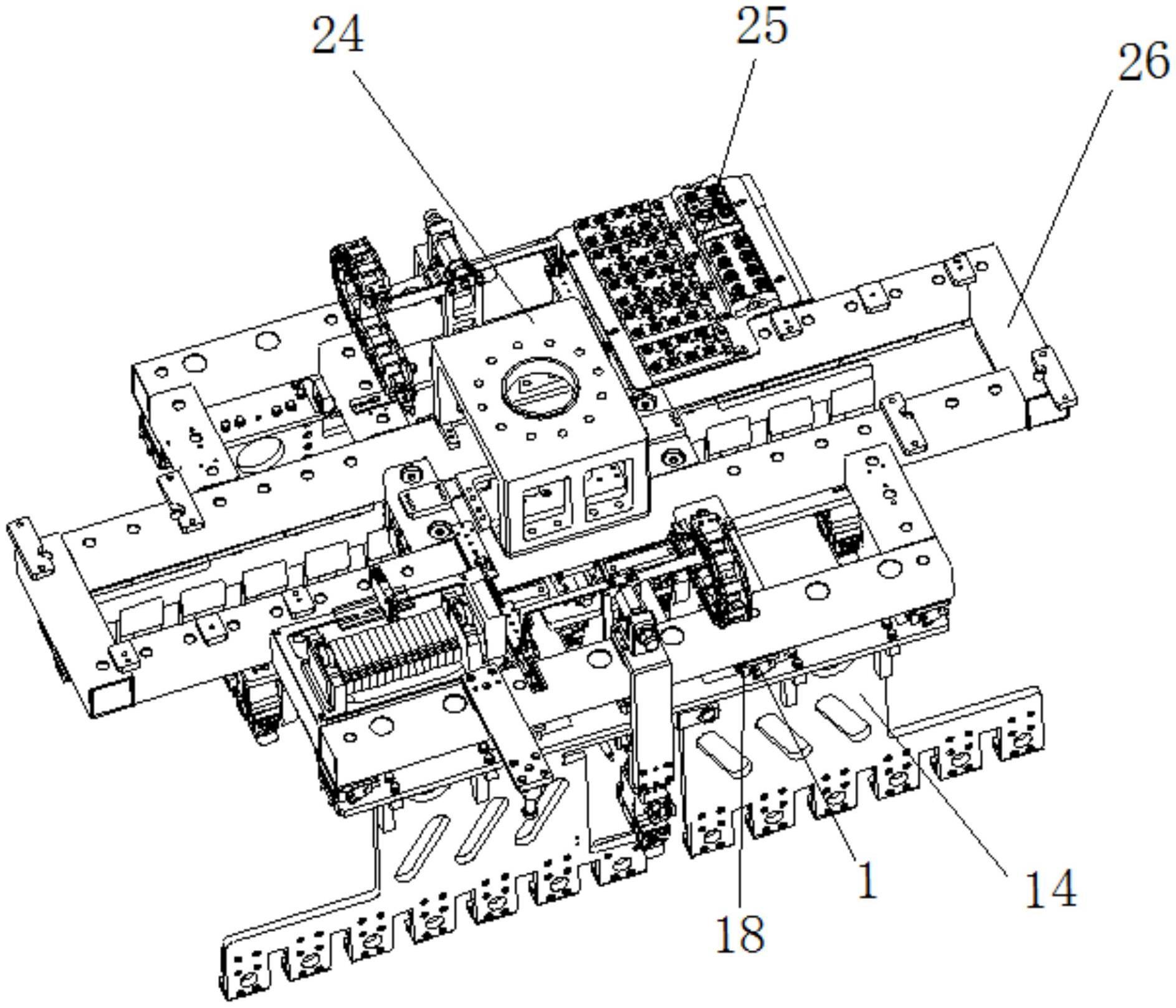
2、为实现上述目的,本实用新型提供如下技术方案:一种模组抓手,包括base焊架、能够抱紧夹住电芯模组的抱夹机构、中间夹取机构、直线导轨,所述直线导轨固定在所述base焊架的下表面前后端,所述抱夹机构通过所述直线导轨在所述base焊架进行活动固定,所述中间夹取机构包括中端板夹钳、连接板、轴补偿块、固定长条块,所述连接板固定在所述base焊架的下表面中心位置,所述固定长条块通过所述轴补偿块固定在所述连接板的下表面上,所述固定长条块远离所述轴补偿块一端下表面上固定第一二指平行抓手,所述第一二指平行抓手的下表面连接有可以夹紧中端板的所述中端板夹钳。
3、进一步的,所述中间夹取机构还包括上下气缸、长条方板、导向板,所述上下气缸固定在所述连接板的下表面,并位于所述固定长条块的前侧,所述上下气缸的输出端连接有伸缩杆,所述伸缩杆远离所述上下气缸的一端固定有所述长条方板,所述长条方板上表面位于所述上下气缸的两侧上均设置有固定在左右对立设置的导向柱,所述导向板套设在左右对立设置的所述导向柱上,所述长条方板上四等分的位置均固定有第二二指平行抓手,所述第二二指平行抓手的下表面固定有可以抓住电芯模组的中隔板的手指优力胶块,所述长条方板中间位置开设有开口,所述固定长条块设置在所述开口内。
4、进一步的,所述抱夹机构包括左推板、右推板、第一侧推气缸、第二侧推气缸,所述左推板通过第一滑槽在位于所述base焊架左侧的所述直线导轨上滑动,所述右推板通过第二滑槽在位于所述base焊架右侧的所述直线导轨上滑动,所述第一侧推气缸固定在所述base焊架的下表面,所述第一侧推气缸的输出端连接有第三伸缩杆,所述第三伸缩杆远离所述第一侧推气缸的一端固定在所述左推板上,所述左推板远离所述直线导轨的一端的内侧表面固定有左托板,所述第二侧推气缸固定在所述base焊架的下表面,并位于所述第一侧推气缸的侧边,所述第二侧推气缸的输出端连接有第四伸缩杆,所述第四伸缩杆远离所述第二侧推气缸的一端固定在所述右推板上,所述右推板远离所述直线导轨的一端的内侧表面固定有右托板。
5、进一步的,所述导向板的前表面固定有第一接近传感器,所述固定长条块的右侧表面上固定有凹槽型光电传感器,所述中端板夹钳远离所述固定长条块一端的前侧表面固定有第二接近传感器。
6、进一步的,还包括能够与机器人连接的法兰安装板、控制信号的输入和输出的阀岛、防止上下气缸掉落的防坠阀,所述法兰安装板固定在所述base焊架上表面的中间位置,所述阀岛设置在所述base焊架上表面的右侧靠前方的位置,所述阀岛与所述上下气缸通过引出气管连接,所述防坠阀设置在所述引出气管上。
7、本实用新型的有益效果:与现有技术相比,本实用新型在对电芯模组进行夹持的同时也能够对模组电芯的中端板以及中侧板进行夹持,通过设置抱夹机构、中间夹取机构对电芯模组本体和模组电芯的中端板进行同时夹持,抱夹机构中的左推板、右推板在第一侧推气缸和第二侧推气缸的作用下沿着设置在base焊架上的直线导轨可以进行滑动,中间夹取机构设置在base焊架的中间位置,中端板夹钳可以夹持中端板,其中上下气缸可以驱动长条方板,通过长条方板上的手指优力胶块去夹持中侧板。
技术特征:
1.一种模组抓手,其特征在于:包括base焊架、能够抱紧夹住电芯模组的抱夹机构、中间夹取机构、直线导轨,所述直线导轨固定在所述base焊架的下表面前后端,所述抱夹机构通过所述直线导轨在所述base焊架进行活动固定,所述中间夹取机构包括连接板、轴补偿块、固定长条块,所述连接板固定在所述base焊架的下表面中心位置,所述固定长条块通过所述轴补偿块固定在所述连接板的下表面上,所述固定长条块远离所述轴补偿块一端下表面上固定第一二指平行抓手,所述第一二指平行抓手的下表面连接有可以夹紧中端板的中端板夹钳。
2.根据权利要求1所述的一种模组抓手,其特征在于:所述中间夹取机构还包括上下气缸、长条方板、导向板,所述上下气缸固定在所述连接板的下表面,并位于所述固定长条块的前侧,所述上下气缸的输出端连接有伸缩杆,所述伸缩杆远离所述上下气缸的一端固定有所述长条方板,所述长条方板上表面位于所述上下气缸的两侧上均设置有固定在左右对立设置的导向柱,所述导向板套设在左右对立设置的所述导向柱上,所述长条方板上四等分的位置均固定有第二二指平行抓手,所述第二二指平行抓手的下表面固定有可以抓住电芯模组的中隔板的手指优力胶块,所述长条方板中间位置开设有开口,所述固定长条块设置在所述开口内。
3.根据权利要求1所述的一种模组抓手,其特征在于:所述抱夹机构包括左推板、右推板、第一侧推气缸、第二侧推气缸,所述左推板通过第一滑槽在位于所述base焊架左侧的所述直线导轨上滑动,所述右推板通过第二滑槽在位于所述base焊架右侧的所述直线导轨上滑动,所述第一侧推气缸固定在所述base焊架的下表面,所述第一侧推气缸的输出端连接有第三伸缩杆,所述第三伸缩杆远离所述第一侧推气缸的一端固定在所述左推板上,所述左推板远离所述直线导轨的一端的内侧表面固定有左托板,所述第二侧推气缸固定在所述base焊架的下表面,并位于所述第一侧推气缸的侧边,所述第二侧推气缸的输出端连接有第四伸缩杆,所述第四伸缩杆远离所述第二侧推气缸的一端固定在所述右推板上,所述右推板远离所述直线导轨的一端的内侧表面固定有右托板。
4.根据权利要求2所述的一种模组抓手,其特征在于:所述导向板的前表面固定有第一接近传感器,所述固定长条块的右侧表面上固定有凹槽型光电传感器,所述中端板夹钳远离所述固定长条块一端的前侧表面固定有第二接近传感器。
5.根据权利要求2所述的一种模组抓手,其特征在于:还包括能够与机器人连接的法兰安装板、控制信号的输入和输出的阀岛、防止上下气缸掉落的防坠阀,所述法兰安装板固定在所述base焊架上表面的中间位置,所述阀岛设置在所述base焊架上表面的右侧靠前方的位置,所述阀岛与所述上下气缸通过引出气管连接,所述防坠阀设置在所述引出气管上。
技术总结
本技术涉及一种模组抓手,包括BASE焊架、能够抱紧夹住电芯模组的抱夹机构、中间夹取机构、直线导轨,所述直线导轨固定在所述BASE焊架的下表面前后端,所述抱夹机构通过所述直线导轨在所述BASE焊架进行活动固定,所述中间夹取机构包括中端板夹钳、连接板、轴补偿块、固定长条块,所述连接板固定在所述BASE焊架的下表面中心位置,所述固定长条块通过所述轴补偿块固定在所述连接板的下表面上,所述固定长条块远离所述轴补偿块一端下表面上固定第一二指平行抓手,所述第一二指平行抓手的下表面连接有可以夹紧中端板的所述中端板夹钳。本技术在对电芯模组进行夹持的同时也能够对模组电芯的中端板以及中侧板进行夹持。
技术研发人员:郑嘉宁,吴恩德,蔡熙熙
受保护的技术使用者:宁德思客琦智能装备有限公司
技术研发日:20221212
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!