一种输煤系统巡检机器人的制作方法
本技术涉及巡检机器人,尤其涉及一种输煤系统巡检机器人。
背景技术:
1、输煤主要包括卸煤、堆煤、上煤和配煤,以达到按时为煤仓提供燃煤的目的。巡检机器人基于ocr和图像识别能力,能模拟专业的人工操作,在全站多级页面与资金交易全流程的各个场景进行点击、识别、检查等巡检操作,可以实现app页面自动化巡检监控。
2、在进行输煤过程中,采用巡检机器人进行巡检工作,在使用悬挂巡检机器人在进行巡检工作过程中会出现以下不足:巡检输送时,1、移动的导轮与轨道容易出现打滑或者不易停止,2、巡检设备与轨道输送设备之间采用固定焊接3、当巡检设备损坏后,因为是悬挂设置,处于较高位置,不便于维修,因此需要一种输煤系统巡检机器人来满足人们的需求。
技术实现思路
1、本实用新型的目的在于提供一种输煤系统巡检机器人,以解决巡检输送时,移动的导轮与轨道容易出现打滑或者不易停止的问题,且巡检设备与轨道输送设备固定焊接的方式,当巡检设备损坏后,因为是悬挂设置,处于较高位置,不便于维修的问题。
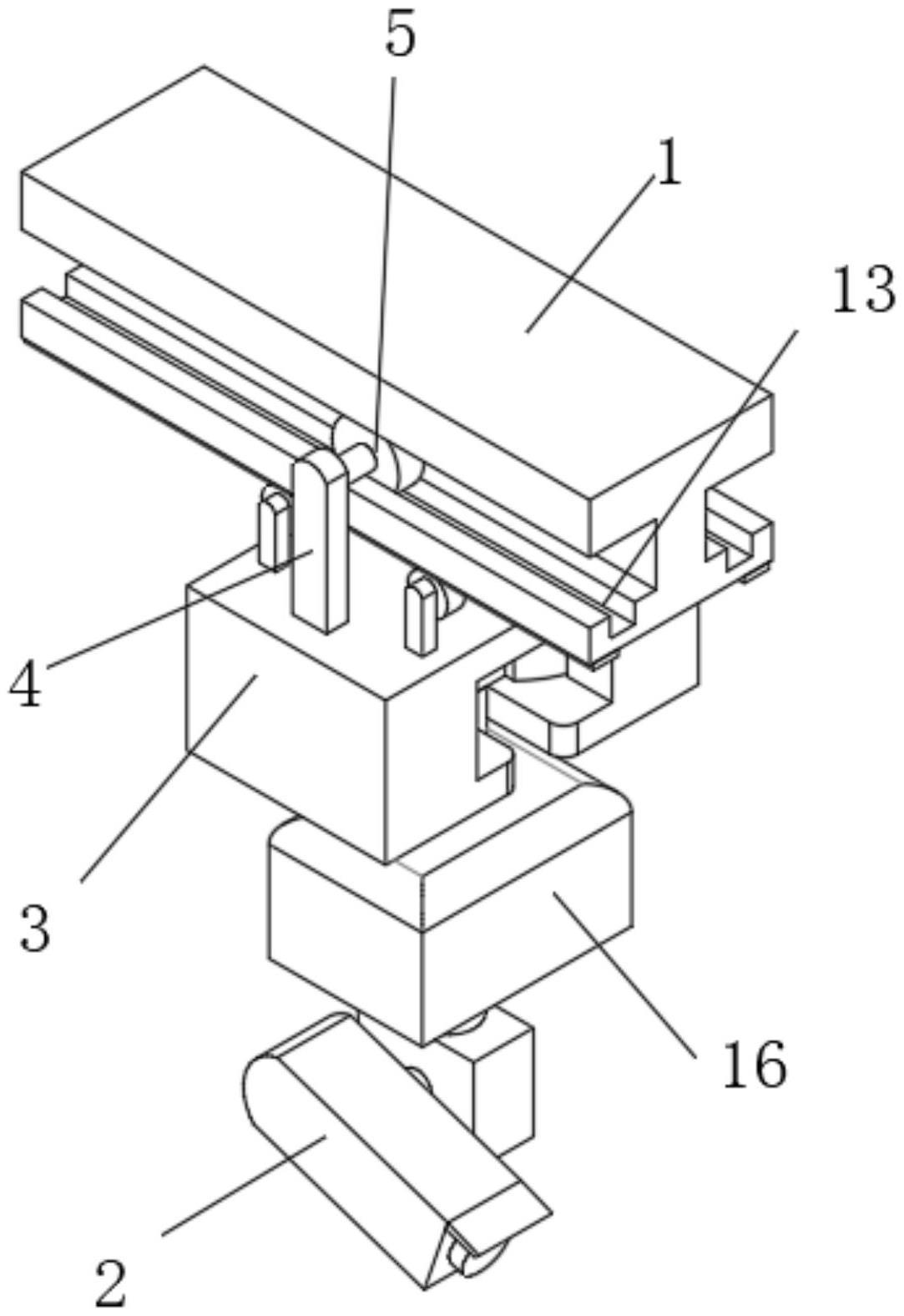
2、为实现上述目的,本实用新型提供如下技术方案:一种输煤系统巡检机器人,其中,包括悬挂导轨、悬挂移动组件、阻挡固定组件及巡检摄像头;
3、悬挂导轨上通过悬挂移动组件安装有移动安装块;
4、移动安装块的一侧开设有活动槽;
5、活动槽内安装有活动块;
6、活动块与活动槽通过阻挡固定组件进行连接,活动块的底侧安装有旋转调整设备,巡检摄像头安装在旋转调整设备上。
7、在其中一些具体实施例中,悬挂移动组件包括安装在移动安装块的顶侧上的固定支架和动力组件,固定支架上转动安装有顶部导轨轮;
8、悬挂导轨上开设有导轮槽,顶部导轨轮活动安装在导轮槽内;
9、移动安装块的顶侧安装有一组第一底部导轨轮和第二底部导轨轮,第一底部导轨轮与移动安装块通过动力组件进行连接,悬挂导轨的底侧安装有两个耐磨条,两个耐磨条均与一组第一底部导轨轮和第二底部导轨轮相适配。
10、在其中一些具体实施例中,阻挡固定组件包括开设在活动槽两侧内壁上的压缩挡槽和压缩组件,压缩挡槽内均通过压缩组件安装有压缩挡块,压缩挡块均位于活动块的一侧上。
11、在其中一些具体实施例中,压缩组件为压缩弹簧,压缩弹簧的一端固定安装在压缩挡槽的一侧内壁上,另一端固定安装在压缩挡块的一侧上。
12、在其中一些具体实施例中,压缩挡槽的底侧内壁上开设有调节孔,压缩挡块的底侧固定安装有调节块,调节块活动安装在调节孔内。
13、在其中一些具体实施例中,压缩挡块的一侧开设有弧形挤压面,弧形挤压面与所述活动块相适配。
14、在其中一些具体实施例中,活动槽的顶侧内壁上开设有顶部弧形面,活动槽的一侧开设有底部弧形面,顶部弧形面和底部弧形面均与活动块相适配。
15、在其中一些具体实施例中,动力组件包括开设在移动安装块一侧的安装槽和导轮轴,安装槽的底侧内壁上固定安装有旋转电机,一组第一底部导轨轮之间通过导轮轴转动连接,导轮轴和旋转电机的输出轴上均安装有转动轮,转动轮上活动套接有同一个转动皮带。
16、在其中一些具体实施例中,安装槽的顶侧内壁上开设有皮带通孔,转动皮带活动安装在所述皮带通孔内,一组顶部导轨轮、一组第一底部导轨轮和一组第二底部导轨轮呈三角设置。
17、在其中一些具体实施例中,悬挂导轨呈“工”型,活动槽与所述活动块呈“t”型。
18、本实用新型的有益效果是:本实用新型中,在进行输煤巡检工作中,启动旋转电机运行,能够带动转动轮转动,在转动皮带的作用下,能够带动第一底部导轨轮转动,在耐磨条的作用下,很方便稳定的进行移动,设置的耐磨条,能够与第一底部导轨轮和第二底部导轨轮接触,增加接触的摩擦力,从而移动和停止都较为快速,不易出现打滑的情况,能够为巡检摄像头的巡检工作提供保障;
19、本实用新型中,当巡检摄像头进行安装时,将巡检摄像头上的活动块安装在t型槽内,安装时,直接按压活动块,随着不断的挤压移动,直至活动块与压缩挡块相错位,此时活动块与活动槽的一侧内壁相接触,压缩挡块在压缩弹簧的弹力作用下,能够复位,并阻挡在活动块的一侧,对活动块进行一个位置固定,当巡检摄像头出现故障后需要进行维修,工作人员通过移动调节块移动,能够带动压缩挡块进行移动,从而便于快速取出活动块,将巡检摄像头取下进行维修,安装和拆卸较为方便,便于后期的维护。
技术特征:
1.一种输煤系统巡检机器人,其特征在于,包括悬挂导轨、悬挂移动组件、阻挡固定组件及巡检摄像头;
2.根据权利要求1所述的输煤系统巡检机器人,其特征在于,所述悬挂移动组件包括安装在所述移动安装块的顶侧上的固定支架和动力组件,所述固定支架上转动安装有顶部导轨轮;
3.根据权利要求1所述的输煤系统巡检机器人,其特征在于,所述阻挡固定组件包括开设在所述活动槽两侧内壁上的压缩挡槽和压缩组件,所述压缩挡槽内通过所述压缩组件安装有压缩挡块,所述压缩挡块均位于所述活动块的一侧上。
4.根据权利要求3所述的输煤系统巡检机器人,其特征在于,所述压缩组件为压缩弹簧,所述压缩弹簧的一端固定安装在所述压缩挡槽的一侧内壁上,另一端固定安装在所述压缩挡块的一侧上。
5.根据权利要求3所述的输煤系统巡检机器人,其特征在于,所述压缩挡槽的底侧内壁上开设有调节孔,所述压缩挡块的底侧固定安装有调节块,所述调节块活动安装在所述调节孔内。
6.根据权利要求3所述的输煤系统巡检机器人,其特征在于,所述压缩挡块的一侧开设有弧形挤压面,所述弧形挤压面与所述活动块相适配。
7.根据权利要求3所述的输煤系统巡检机器人,其特征在于,所述活动槽的顶侧内壁上开设有顶部弧形面,活动槽的一侧开设有底部弧形面,所述顶部弧形面和所述底部弧形面均与所述活动块相适配。
8.根据权利要求2所述的输煤系统巡检机器人,其特征在于,所述动力组件包括开设在所述移动安装块一侧的安装槽和导轮轴,所述安装槽的底侧内壁上固定安装有旋转电机,一组所述第一底部导轨轮之间通过所述导轮轴转动连接,所述导轮轴和所述旋转电机的输出轴上均安装有转动轮,所述转动轮上活动套接有同一个转动皮带。
9.根据权利要求8所述的输煤系统巡检机器人,其特征在于,所述安装槽的顶侧内壁上开设有皮带通孔,所述转动皮带活动安装在所述皮带通孔内,一组所述顶部导轨轮、一组所述第一底部导轨轮和一组所述第二底部导轨轮呈三角设置。
10.根据权利要求1所述的输煤系统巡检机器人,其特征在于,所述悬挂导轨呈“工”型,所述活动槽与所述活动块呈“t”型。
技术总结
本技术公开了一种输煤系统巡检机器人,其中,包括悬挂导轨、悬挂移动组件和阻挡固定组件及巡检摄像头,悬挂导轨上通过悬挂移动组件安装有移动安装块,移动安装块的一侧开设有活动槽,活动槽内安装有活动块,活动块与活动槽通过阻挡固定组件进行连接,活动块的底侧安装有旋转调整设备,巡检摄像头安装在旋转调整设备上。本申请在进行输煤巡检工作中,启动旋转电机运行带动转动轮转动,在转动皮带的作用下带动第一底部导轨轮转动,在耐磨条的作用下能方便稳定的进行移动,设置的耐磨条能够与第一底部导轨轮和第二底部导轨轮接触增加接触的摩擦力,从而移动和停止都较为快速,不易出现打滑的情况,能够为巡检摄像头的巡检工作提供保障。
技术研发人员:许文杰,张飞,韩凤飞,刘春晖,张悦芳,王智慧,张永贵,侯俊华,任德龙,凌超,雷雨
受保护的技术使用者:北方魏家峁煤电有限责任公司
技术研发日:20221214
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!