一种岸桥防小车啃轨警报系统
本技术涉及一种岸桥防小车啃轨警报系统,属于起重机械检测设备。
背景技术:
1、在岸桥起重机小车运行过程中,由于长期重载等诸多问题导致车轮轮缘与轨道的侧面接触,发生强烈磨损的现象,其小车轮与轨道接触会出现啃轨问题。如果不能及时检出岸桥起重机啃轨问题,则可能会出现如下安全隐患。
2、1、当出现轻微啃轨时,会影响起重机的正常运行,而且这种情况下不易被发现,容易被忽视,造成起重机设备和相关连接件的损坏,进而增大安全生产的风险;
3、2、当起重机的车轮与轨道剧烈磨损时,运行阻力比正常状态增大三倍左右,致使运行电机和传动机构超载运转,会发生烧坏电机、扭传动轴或损坏车轮的设备事故;
4、3、可能会造成起重机脱轨的危险。
5、常见的啃轨问题表现为两种主要形式,一是自由轮在行进中出现向左或向右走偏导致的轮缘啃轨现象,二是轮缘跳到轨道面上的情况。
6、针对上述的小车自由轮啃轨的主要形式,设计一种岸桥防小车啃轨警报系统,有效地解决上述的技术问题。
技术实现思路
1、本实用新型的主要目的在于提供一种岸桥防小车啃轨警报系统,对小车轮行进过程中出现向左或向右走偏导致的啃轨现象或由于轮缘跳到轨道面上导致的啃轨问题进行实时监测。
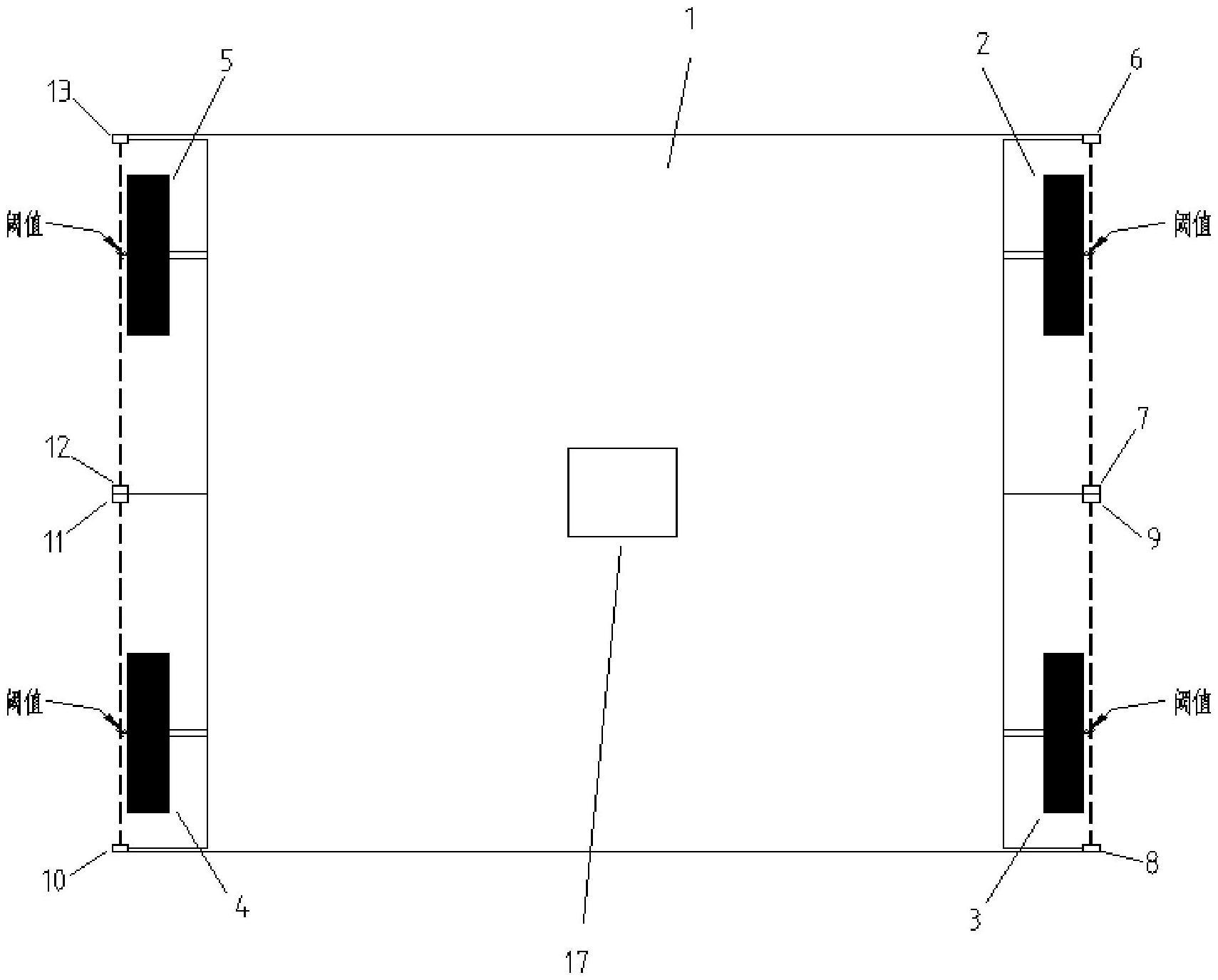
2、为了实现上述目的,一种岸桥防小车啃轨警报系统,包括小车车体1,分别设置于小车车体1两侧的右前轮2、右后轮3、左后轮4、左前轮5;设置于右前轮2部位的右前激光发射装置6、右前激光接收装置7;设置于右后轮3部位的右后激光发射装置8、右后激光接收装置9;设置于左后轮4部位的左后激光发射装置10、左后激光接收装置11;设置于左前轮5部位的左前激光发射装置12,左前激光接收装置13;所述右后轮3、右前轮2位置分别安装有右后激光测距装置15和右前激光测距装置16;所述小车车体中部安装有数据处理器17,所述右前激光接收装置7、右后激光接收装置9、左后激光接收装置11、左前激光接收装置13以及右后激光测距装置15和右前激光测距装置16连接至数据处理器17,所述小车车体1行走在轨道14上。
3、进一步,所述数据处理器17连接plc,且数据处理器17中设有算法,通过内部算法向plc发送0或1,通过判断真假的方式,反应小车车轮是否啃轨。
4、进一步,所述右后激光测距装置15和右前激光测距装置16分别测量至右侧轨道距离以确定小车整体横移情况和前后部位横移情况。
5、进一步,所述右前激光发射装置6与右前激光接收装置7、右后激光发射装置8与右后激光接收装置9位于一条直线上,且连线与轮轴垂直;左前激光发射装置12与左前激光接收装置13、左后激光发射装置10与左后激光接收装置11位于一条直线上,且连线与轮轴垂直。
6、进一步,所述车轮轴底部的两个平行小车轨道侧面中线的激光测距装置和所述4组激光接收装置的精度在1mm即可。
7、进一步,所述车轮轴底部的两个平行小车轨道侧面中线的激光测距装置得到的实时数据传输到数据处理器17中,数据处理器17完成|数据-原始值|<阈值的布尔运算,该阈值为工程经验得到。若|数据-原始值|<阈值为真即为无啃轨;为假,则发生啃轨。
8、进一步,所述4组用于监测小车车轮走偏的激光发射装置和接收装置,通过激光发射装置发射激光并在接收装置接收激光信号,激光与车轮外缘距离阈值根据工程经验设定,当有轮子发生走偏超过阈值时,激光接收装置接收不到激光信号。此时依据连接接收装置的数据处理器17中设置的布尔运算,当能接收到信号时为真,说明轮子偏移处于安全范围内,当不能接收信号则为假,说明轮子偏离已经超过了阈值。
技术特征:
1.一种岸桥防小车啃轨警报系统,其特征在于,包括小车车体(1),分别设置于小车车体(1)两侧的右前轮(2)、右后轮(3)、左后轮(4)、左前轮(5);以及设置于右前轮(2)部位的右前激光发射装置(6)、右前激光接收装置(7);设置于右后轮(3)部位的右后激光发射装置(8)、右后激光接收装置(9);设置于左后轮(4)部位的左后激光发射装置(10)、左后激光接收装置(11);设置于左前轮(5)部位的左前激光发射装置(12),左前激光接收装置(13);所述右后轮(3)、右前轮(2)位置分别安装有右后激光测距装置(15)和右前激光测距装置(16);所述小车车体中部安装有数据处理器(17),所述右前激光接收装置(7)、右后激光接收装置(9)、左后激光接收装置(11)、左前激光接收装置(13)以及右后激光测距装置(15)和右前激光测距装置(16)连接至数据处理器(17),所述小车车体(1)行走在轨道(14)上。
2.根据权利要求1所述的一种岸桥防小车啃轨警报系统,其特征在于,所述数据处理器(17)连接plc,且数据处理器(17)中设有算法,通过内部算法向plc发送0或1,通过判断真假的方式,反应小车车轮是否啃轨。
3.根据权利要求1所述的一种岸桥防小车啃轨警报系统,其特征在于,所述右后激光测距装置(15)和右前激光测距装置(16)分别测量至右侧轨道距离以确定小车整体横移情况和前后部位横移情况。
4.根据权利要求2所述的一种岸桥防小车啃轨警报系统,其特征在于,所述右前激光发射装置(6)与右前激光接收装置(7)、右后激光发射装置(8)与右后激光接收装置(9)位于一条直线上,且连线与轮轴垂直;左前激光发射装置(12)与左前激光接收装置(13)、左后激光发射装置(10)与左后激光接收装置(11)位于一条直线上,且连线与轮轴垂直。
技术总结
一种岸桥防小车啃轨警报系统,包括小车车体,分别设置于小车车体两侧的右前轮、右后轮、左后轮、左前轮;设置于右前轮部位的右前激光发射装置、右前激光接收装置;设置于右后轮部位的右后激光发射装置、右后激光接收装置;设置于左后轮部位的左后激光发射装置、左后激光接收装置;设置于左前轮部位的左前激光发射装置,左前激光接收装置;通过判断车轮偏移是否超过阈值导致能否接收到激光信号设定布尔运算。
技术研发人员:唐现琼,吴承熙
受保护的技术使用者:湘潭大学
技术研发日:20221216
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!