一种玻璃纤维纱团包装托盘自动分配系统的制作方法
本技术涉及池窑法生产玻璃纤维包装领域,特别涉及一种玻璃纤维纱团包装托盘自动分配系统。
背景技术:
1、池窑法生产的玻璃纤维纱团,在线包装通过自动摆托机摆放在托盘上,包装前需要人工从托盘库拿取托盘摆放,而托盘为14个堆叠摆放,且单个托盘较重;其存在以下不足:第一、托盘人工拿取不便,劳动强度大,影响包装效率,第二、人工放置托盘位置容易产生偏差,导致包装歪斜,影响包装质量,第三、人工拿取托盘摆放有砸伤脚部的风险,为此,需要设计新的技术方案给予解决。
技术实现思路
1、本实用新型的目的是提供一种玻璃纤维纱团包装托盘自动分配系统,以实现玻璃纤维纱团包装托盘拿取、摆放自动化。
2、本实用新型的上述技术目的是通过以下技术方案得以实现的:
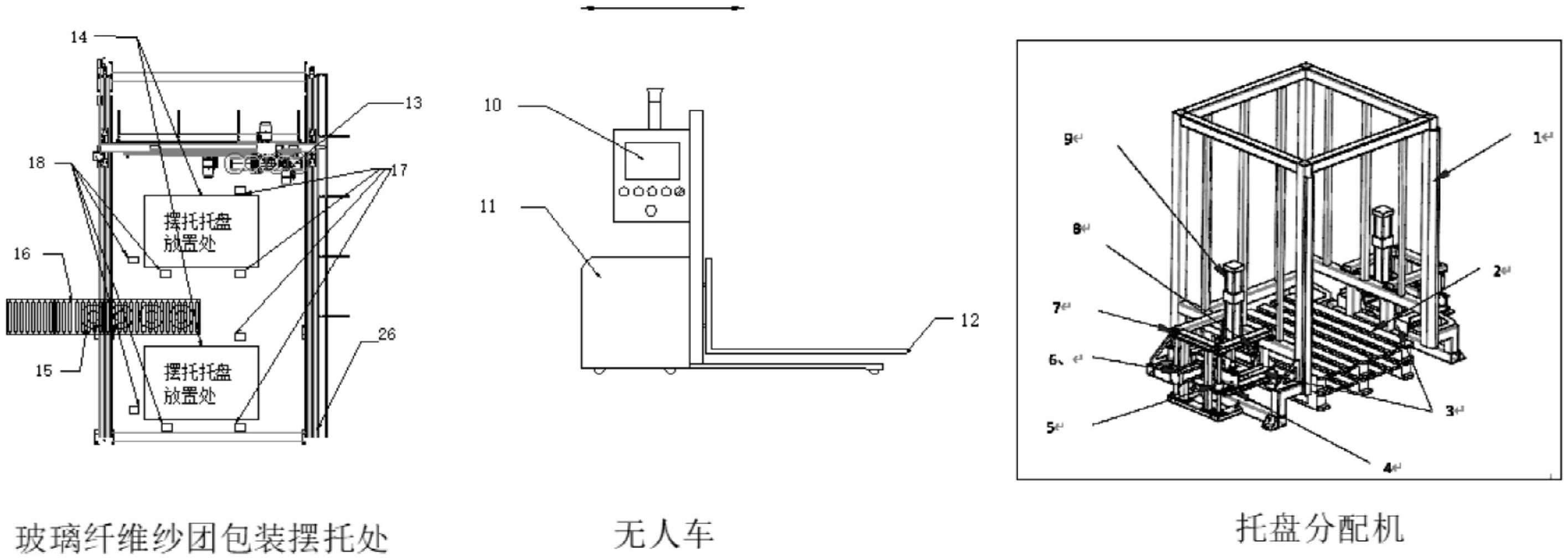
3、一种玻璃纤维纱团包装托盘自动分配系统,包括托盘分配机、无人车、摆托机系统和玻璃纤维包装线,所述托盘分配机、无人车与摆托机系统三者之间无线通信连接,所述摆托机系统对无人车发送摆托信号后,无人车接收信号后运动到托盘分配机位置,无人车向托盘分配机发送取托信号,托盘分配机接收信号后将第二层及以上托盘托起,无人车将第一层托盘取出,并运输到摆托机系统的摆托托盘放置工位,并将托盘放置摆托放置工位,摆托机系统对托盘位置进行定位感应,将托盘信息反馈给无人车,无人车根据反馈信息对托盘位置进行校正,无人车与托盘分配机复位,等待下次信号指令;所述摆托机系统安装在玻璃纤维包装线的末端,摆托机系统检测到托盘就位后,控制摆托机抓取玻璃纤维包装线上的玻璃纤维纱团摆放至托盘上。
4、进一步的,所述托盘分配机包括立柱框和安装在立柱上的提升机构和安装在提升机构上的横移机构,所述横移机构可向堆叠的两托盘之间的空隙伸出和收回,所述提升机构上移可将横移机构上方的托盘托起。
5、进一步的,所述横移机构内安装有横移导轨滑块机构和横移气缸,所述横移导轨滑块机构由横移滑轨和横移滑块组成,所述横移滑块安装在横移滑轨上,所述横移气缸的推杆端部与横移滑块的一侧固定连接,横移气缸伸缩带动横移滑块沿横移滑轨横向移动。
6、进一步的,所述提升机构包括提升底板、提升立柱、提升导轨滑块机构和提升气缸,所述提升导轨滑块机构由提升导轨和提升滑块组成,所述提升底板两侧与横移滑块固定连接,所述提升气缸固定安装在提升立柱上,所述提升气缸的推杆末端与提升底板中间位置固定连接,所述提升立柱与立柱框固定连接,提升底板一侧的导向杯卡套在提升立柱两个导向圆杆内,所述提升导轨安装在立柱框上,所述提升滑块与提升底板固定连接。
7、进一步的,所述无人车包括无人工控系统、无人车本体和升降货叉,所述无人工控系统设置在无人车本体上端。
8、进一步的,所述摆托机系统包括摆托机、托盘放置工位、托盘对射感应器和托盘定位感应器,所述摆托机设置在托盘放置工位和玻璃纤维包装线的上方,并可沿摆托机的立柱横梁移动,所述托盘对射感应器安装在托盘放置工位的两侧,所述托盘定位感应器安装在托盘放置工位的左侧和下侧,用于监测托盘的位置。
9、进一步的,所述托盘放置工位的数量为两个,两个托盘放置工位对称设置在玻璃纤维包装线的两侧。
10、进一步的,所述摆托机包括摆托机横梁、摆托机抓纱气缸、抓纱瓦片、抓纱导轨滑块机构、摆托机抓手、收拢导轨滑块机构和摆托机收拢气缸,所述摆托机抓纱气缸、抓纱导轨滑块机构、收拢导轨滑块机构和摆托机收拢气缸和安装托板,所述摆托机收拢气缸安装在安装托板上,其气缸推杆与下一块安装托板连接,所述安装托板上安装有收拢导轨滑块机构的滑块部分,收拢导轨滑块机构的导轨与摆托机横梁固定连接,所述摆托机抓手安装在安装托板下方,摆托机收拢气缸收拢从而实现摆托机抓手瓦片、摆托机抓手抓纱后收拢;所述抓纱导轨滑块机构与安装托板连接,摆托机抓纱气缸安装在安装托板上,摆托机抓纱气缸推杆与抓纱导轨滑块机构连接,所述抓纱瓦片与抓纱导轨滑块机构连接,摆托机抓纱气缸合拢从而实现抓纱。
11、进一步的,所述托盘对射感应器选用红外对射传感器。
12、进一步的,所述托盘定位感应器设有四个。
13、进一步的,所述托盘分配机、无人车与摆托机系统三者之间通过zigbee模块实现无线通信。
14、综上所述,本实用新型具有以下有益效果:
15、(1)实现玻璃纤维纱团包装托盘拿取、摆放自动化;
16、(2)降低摆托工劳动强度,提高包装效率,同时自动分配摆放托盘可提高托盘放置准确性,避免因人工放置托盘不准导致的产品摆托歪斜,造成的翻包或客诉。
17、(3)规避托盘拿取安全风险。
技术特征:
1.一种玻璃纤维纱团包装托盘自动分配系统,其特征在于:包括托盘分配机、无人车、摆托机系统和玻璃纤维包装线(16),所述摆托机系统安装在玻璃纤维包装线(16)的末端,所述托盘分配机、无人车与摆托机系统三者之间无线通信连接,所述无人车位于摆托系统与托盘分配机之间。
2.根据权利要求1所述的一种玻璃纤维纱团包装托盘自动分配系统,其特征在于:所述托盘分配机包括立柱框(1)和安装在立柱框(1)上的提升机构和安装在提升机构上的横移机构(3),所述横移机构(3)可向堆叠的两托盘(2)之间的空隙伸出和收回,所述提升机构上移可将横移机构(3)上方的托盘(2)托起。
3.根据权利要求2所述的一种玻璃纤维纱团包装托盘自动分配系统,其特征在于:所述横移机构(3)内安装有横移导轨滑块机构(4)和横移气缸(6),所述横移导轨滑块机构(4)由横移滑轨和横移滑块组成,所述横移滑块安装在横移滑轨上,所述横移气缸(6)的推杆端部与横移滑块的一侧固定连接,横移气缸(6)伸缩带动横移滑块沿横移滑轨横向移动。
4.根据权利要求3所述的一种玻璃纤维纱团包装托盘自动分配系统,其特征在于:所述提升机构包括提升底板(5)、提升立柱(7)、提升导轨滑块机构(8)和提升气缸(9),所述提升导轨滑块机构(8)由提升导轨和提升滑块组成,所述提升底板(5)两侧与横移滑块固定连接,所述提升气缸(9)固定安装在提升立柱(7)上,所述提升气缸(9)的推杆末端与提升底板(5)中间位置固定连接,所述提升立柱(7)与立柱框(1)固定连接,横移机构(3)一侧的导向杯卡套在提升立柱(7)两个导向圆杆内,所述提升导轨安装在立柱框(1)上,所述提升滑块与提升底板(5)固定连接。
5.根据权利要求1所述的一种玻璃纤维纱团包装托盘自动分配系统,其特征在于:所述无人车包括无人工控系统(10)、无人车本体(11)和升降货叉(12),所述无人工控系统(10)设置在无人车本体(11)上端。
6.根据权利要求2所述的一种玻璃纤维纱团包装托盘自动分配系统,其特征在于:所述摆托机系统包括摆托机(13)、托盘放置工位(14)、托盘对射感应器(17)和托盘定位感应器(18),所述摆托机(13)设置在托盘放置工位(14)和玻璃纤维包装线(16)的上方,并可沿摆托机(13)的立柱横梁(26)移动,所述托盘对射感应器(17)安装在托盘放置工位(14)的两侧,所述托盘定位感应器(18)安装在托盘放置工位(14)的左侧和下侧,用于监测托盘(2)的位置。
7.根据权利要求6所述的一种玻璃纤维纱团包装托盘自动分配系统,其特征在于:所述托盘放置工位(14)的数量为两个,两个托盘放置工位(14)对称设置在玻璃纤维包装线(16)的两侧。
8.根据权利要求6所述的一种玻璃纤维纱团包装托盘自动分配系统,其特征在于:所述摆托机(13)包括摆托机横梁(19)、摆托机抓纱气缸(20)、抓纱瓦片(21)、抓纱导轨滑块机构(22)、摆托机抓手(23)、收拢导轨滑块机构(24)和摆托机收拢气缸(25),所述摆托机抓纱气缸(20)、抓纱导轨滑块机构(22)、收拢导轨滑块机构(24)和摆托机收拢气缸(25)和安装托板(27),所述摆托机收拢气缸(25)安装在安装托板(27)上,其气缸推杆与下一块安装托板连接,所述安装托板(27)上安装有收拢导轨滑块机构(24)的滑块部分,收拢导轨滑块机构(24)的导轨与摆托机横梁(19)固定连接,所述摆托机抓手(23)安装在安装托板下方,摆托机收拢气缸(25)收拢从而实现摆托机抓手瓦片(21)、摆托机抓手(23)抓纱后收拢;所述抓纱导轨滑块机构(22)与安装托板(27)连接,摆托机抓纱气缸(20)安装在安装托板(27)上,摆托机抓纱气缸(20)推杆与抓纱导轨滑块机构(22)连接,所述抓纱瓦片(21)与抓纱导轨滑块机构(22)连接,摆托机抓纱气缸合拢从而实现抓纱。
9.根据权利要求6所述的一种玻璃纤维纱团包装托盘自动分配系统,其特征在于:所述托盘对射感应器(17)选用红外对射传感器;所述托盘定位感应器(18)设有四个,每两个托盘定位感应器(18)组合安装在托盘放置工位(14)的外侧。
10.根据权利要求1所述的一种玻璃纤维纱团包装托盘自动分配系统,其特征在于:所述托盘分配机、无人车与摆托机系统三者之间通过zigbee模块实现无线通信。
技术总结
本实用公开了一种玻璃纤维纱团包装托盘自动分配系统,包括托盘分配机、无人车、摆托机系统和玻璃纤维包装线,摆托机系统对无人车发送摆托信号后,无人车接收信号后运动到托盘分配机位置,无人车向托盘分配机发送取托信号,托盘分配机接收信号后将第二层及以上托盘托起,无人车将第一层托盘取出,运输到摆托机系统的摆托放置工位,并将托盘放置摆托托盘放置工位,摆托机系统对托盘位置进行定位感应,将托盘信息反馈给无人车,无人车根据反馈信息对托盘位置进行校正,无人车与托盘分配机复位,等待下次信号指令;摆托机系统安装在玻璃纤维包装线的末端,摆托机系统检测到托盘就位后,控制摆托机抓取玻璃纤维包装线上的玻璃纤维纱团摆放至托盘上。
技术研发人员:徐亚锁,张舒晓,熊敏,杨伟忠,王晓兵
受保护的技术使用者:巨石集团九江有限公司
技术研发日:20221226
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!