取纸手臂的制作方法
本公开涉及取纸设备,尤其涉及一种取纸手臂。
背景技术:
1、光电显示玻璃基板在包装区进行包装时,每两张玻璃之间通过取纸手臂夹取一张间隔纸将两片玻璃隔开。玻璃基板生产线兼容不同代次产品生产,由于不同代次玻璃基板玻璃尺寸差异,使用的间隔纸尺寸也有差异,需要对现有取纸手臂上的取纸夹爪进行位置调整,对产线切换不同代次玻璃基板造成影响,降低了产线切换效率,且容易造成包装品质事故。
2、针对这一问题,亟需一种新型的取纸手臂来解决上述技术问题。
技术实现思路
1、本公开所要解决的技术问题是:解决了现有取纸手臂无法兼容不同代次玻璃基板间隔纸取放的技术问题。
2、为解决上述技术问题,本公开实施例提供一种取纸手臂,包括:
3、手臂;
4、伸缩夹爪组,其包括两个并列间隔设置于手臂上且可伸缩的伸缩夹爪;以及
5、固定夹爪组,其位于两个伸缩夹爪之间,包括至少两个并列间隔设置于手臂上的固定夹爪。
6、在一些实施例中,手臂包括长条形支架,两个伸缩夹爪分别设置于支架的两端。
7、在一些实施例中,伸缩夹爪包括固设于支架上的伸缩气缸、与伸缩气缸的输出端连接的第一连接件以及固接于第一连接件上以用于夹取的第一夹爪。
8、在一些实施例中,第一夹爪通过调整螺丝固接于第一连接件上。
9、在一些实施例中,固定夹爪包括固接于支架上的第二连接件和固接于第二连接件上以用于夹取的第二夹爪。
10、在一些实施例中,第二夹爪通过调整螺丝固接于第二连接件上。
11、在一些实施例中,固定夹爪组包括三个固定夹爪。
12、在一些实施例中,三个固定夹爪等间距设置。
13、在一些实施例中,伸缩夹爪组和固定夹爪组均由plc程序控制。
14、通过上述技术方案,本公开通过调整螺丝将夹爪固接于连接件上,可以实现单个取纸夹爪的高低及前后位置的调整,通过调整,能保证每个夹爪取纸时,间隔纸正好在夹爪的中间位置,防止因夹爪将纸夹取褶皱或造成折纸的包装品质问题;通过设置可伸缩的伸缩夹爪组,可以根据需要调整伸缩夹爪的夹爪位置,实现兼容不同代次玻璃基板间隔纸取放,提高不同代次玻璃基板的切换效率,保证了玻璃基板包装品质的稳定性。
技术特征:
1.一种取纸手臂,其特征在于,包括:
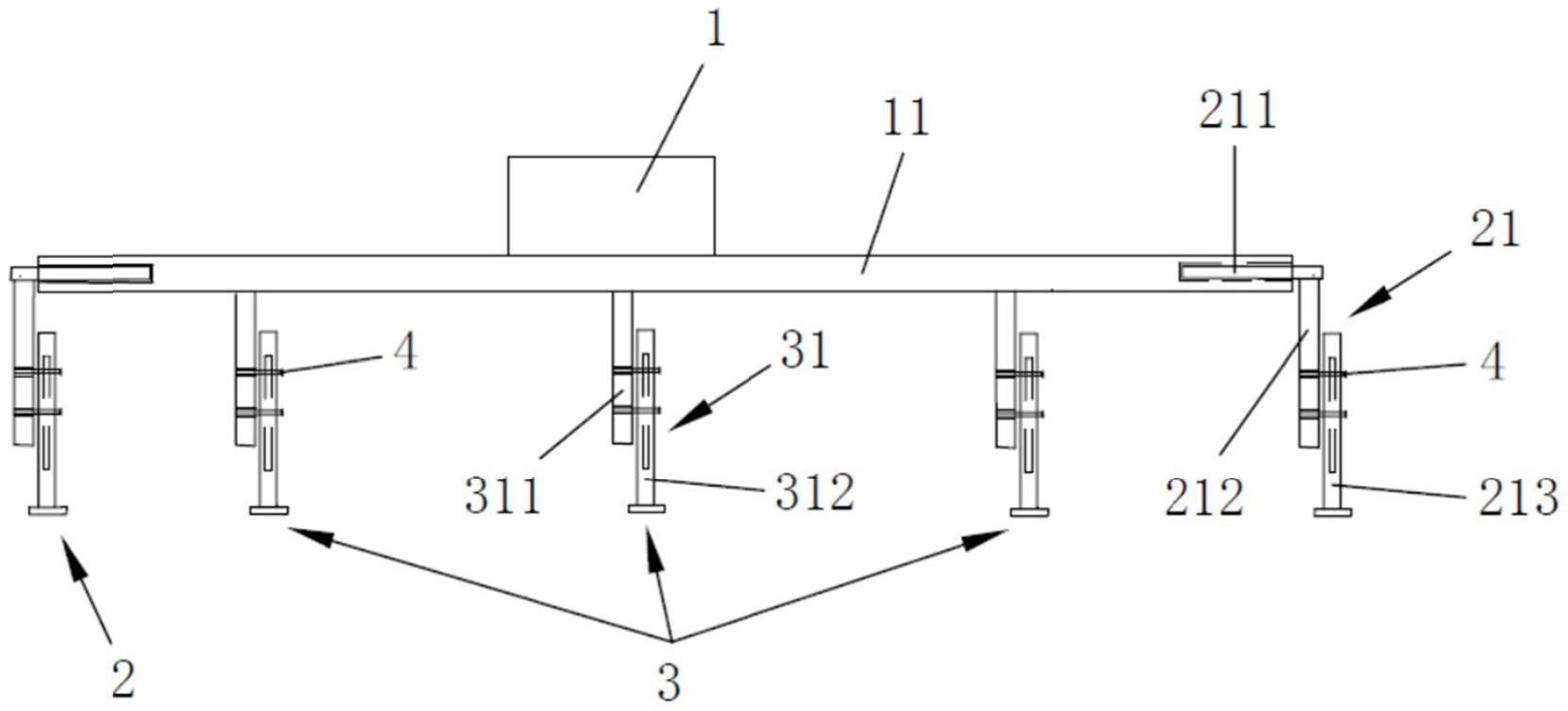
2.根据权利要求1所述的取纸手臂,其特征在于,所述手臂(1)包括长条形支架(11),两个所述伸缩夹爪(21)分别设置于所述支架(11)的两端。
3.根据权利要求2所述的取纸手臂,其特征在于,所述伸缩夹爪(21)包括固设于所述支架(11)上的伸缩气缸(211)、与所述伸缩气缸(211)的输出端连接的第一连接件(212)以及固接于所述第一连接件(212)上以用于夹取的第一夹爪(213)。
4.根据权利要求3所述的取纸手臂,其特征在于,所述第一夹爪(213)通过调整螺丝(4)固接于所述第一连接件(212)上。
5.根据权利要求2所述的取纸手臂,其特征在于,所述固定夹爪(31)包括固接于所述支架(11)上的第二连接件(311)和固接于所述第二连接件(311)上以用于夹取的第二夹爪(312)。
6.根据权利要求5所述的取纸手臂,其特征在于,所述第二夹爪(312)通过调整螺丝(4)固接于所述第二连接件(311)上。
7.根据权利要求1所述的取纸手臂,其特征在于,所述固定夹爪组(3)包括三个所述固定夹爪(31)。
8.根据权利要求7所述的取纸手臂,其特征在于,三个所述固定夹爪(31)等间距设置。
9.根据权利要求1所述的取纸手臂,其特征在于,所述伸缩夹爪组(2)和所述固定夹爪组(3)均由plc程序控制。
技术总结
本公开提供一种取纸手臂,涉及取纸设备技术领域。该取纸手臂包括:手臂;伸缩夹爪组,其包括两个并列间隔设置于所述手臂上且可伸缩的伸缩夹爪;以及固定夹爪组,其位于两个所述伸缩夹爪之间,包括至少两个并列间隔设置于所述手臂上的固定夹爪。本公开通过设置可伸缩的伸缩夹爪组,可以根据需要调整伸缩夹爪的夹爪位置,实现兼容不同代次玻璃基板间隔纸取放,提高了不同代次玻璃基板的切换效率,保证了包装品质的稳定性。
技术研发人员:李青,李赫然,林海峰,方红义,翟星宇,陈涛涛,吴亚平,石志强,李震
受保护的技术使用者:芜湖东旭光电科技有限公司
技术研发日:20221220
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!