一种机械臂组件及其包管机的制作方法
本技术涉及锯片包装,具体地说,涉及一种机械臂组件及其包管机。
背景技术:
1、目前锯片加工好后需要包上护齿管对刀齿进行保护,公开号为cn 208198925 u的中国专利,公开了:一种全自动锯片护齿用包管机,包括机架主体,所述的机架主体顶部设有工作台,工作台上设有管盘安装柱、剖管机构、锯片安装座机构与触摸屏;所述的触摸屏由支撑架支撑在工作台上,支撑架上设有包管机构;所述的机架主体下方设有电气控制箱;所述的机架主体顶部还设有低于工作台的供料卸料台,所述的供料卸料台中间设有上下料机械手臂,在上下料机械手臂两侧对称设有供料机构与卸料机构。并由说明书可知待包管锯片叠放在供料机构上,包管好的锯片叠放在卸料机构上,上下料机械手臂通过两个可上下移位的电磁吸盘同时进行上料与下料的工作。该技术方案中由于未包上护齿管的锯片为叠放在供料机构上,我们发现叠放在一起的相邻的两个锯片上的刀齿会相互摩擦,导致刀齿受损,使得出厂的锯片质量下降;为了解决该问题,于是我们在每两个待包管的锯片之间放入一个隔板,通过隔板防止刀齿相互摩擦,从而保护包管之前的刀齿;但是增加隔板之后,现有技术的包管机只能依靠人工去除隔板,对人工的依赖较大。
技术实现思路
1、本实用新型的目的在于提供一种机械臂组件及其包管机,以解决上述背景技术中提出的问题。
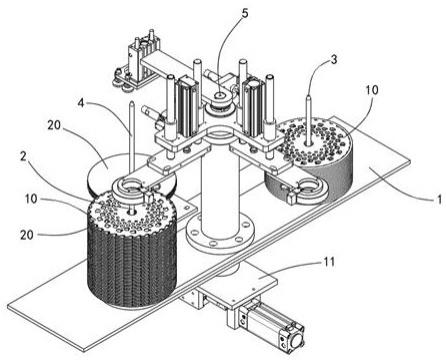
2、为实现上述目的,本实用新型提供一种机械臂组件,包括驱动机构、机械臂工作轴、机械臂安装轴套、第一机械手、第二机械手以及第三机械手,所述机械臂安装轴套用于安装在机架的顶部,所述机械臂工作轴可旋转的设置在所述机械臂安装轴套内,所述机械臂工作轴的底端贯穿所述机架的顶部与设置在所述机架内的所述驱动机构传动连接,所述驱动机构用于带动所述机械臂工作轴旋转;所述机械臂工作轴的顶端穿出所述机械臂安装轴套,设置有所述第一机械手、第二机械手以及第三机械手,所述第一机械手用于包管好锯片的下料,所述第二机械手用于待包管锯片的上料,所述第三机械手用于去除待包管锯片之间的隔板。
3、作为本技术方案的进一步改进,所述机械臂工作轴的顶端设置有安装板,所述安装板呈t字形结构,包括第一延伸板、第二延伸板以及第三延伸板,所述第一延伸板与第三延伸板水平连接形成条状板,所述第二延伸板垂直于所述条状板,所述第一机械手设置在所述第一延伸板上,所述第二机械手设置在所述第二延伸板上,所述第三机械手设置在所述第三延伸板上,所述第一机械手、第二机械手以及第三机械手到所述机械臂工作轴的距离均相等。
4、作为本技术方案的进一步改进,所述机械臂工作轴的顶端设置有安装板,所述安装板由两个相互垂直的延伸板组成,分别是第一延伸板和第二延伸板,所述第一机械手设置在所述第一延伸板上,所述第二机械手设置在所述第二延伸板上;所述机械臂工作轴的顶端在位于所述安装板上方/下方的部分可拆卸的设置有第三延伸板,并且所述第三延伸板与所述第一延伸板平行,所述第三机械手设置在所述第三延伸板上,所述第一机械手、第二机械手以及第三机械手到所述机械臂工作轴的距离均相等。
5、作为本技术方案的进一步改进,所述机械臂安装轴套的顶部设置有限位板,所述限位板的两端分别设置有缓冲限位杆和第一接近开关,所述缓冲限位杆用于与所述安装板接触的端部设置有缓冲胶垫;所述限位板一端的所述缓冲限位杆用于限止所述安装板顺时针旋转,该端的所述第一接近开关用于接收和反馈所述安装板的位置信息给外部控制器;所述限位板另一端的所述缓冲限位杆用于限止所述安装板逆时针旋转,该端的所述第一接近开关用于接收和反馈所述安装板的位置信息给外部控制器。
6、作为本技术方案的进一步改进,所述第一机械手与第二机械手结构相同,所述第一机械手包括第一伸缩气缸、取卸片机构、导柱以及导套,所述第一伸缩气缸垂直设置在所述第一延伸板上,其活塞杆的端部贯穿所述第一延伸板与所述取卸片机构连接,所述导套设置在所述第一延伸板上,所述导柱设置在所述取卸片机构上,所述导柱与所述导套配合连接,通过所述第一伸缩气缸带动所述取卸片机构沿所述导柱进行上下移动。
7、作为本技术方案的进一步改进,所述取卸片机构包括电磁吸盘、第二接近开关、连接板和移动板,所述连接板的一端设置有避让孔,所述避让孔用于避让供片机构/卸料机构上的料杆,所述电磁吸盘设置在所述连接板上并位于所述避让孔的下方,所述连接板的另一端与所述移动板固定连接,所述移动板与所述第一伸缩气缸的活塞杆固定连接,所述导柱设置在所述移动板上,所述第二接近开关设置在所述连接板上,所述第二接近开关用于接收和反馈锯片的位置信息给外部控制器。
8、作为本技术方案的进一步改进,所述第三机械手包括第二伸缩气缸和吸隔板机构,所述第二伸缩气缸垂直设置在所述第三延伸板的端部,其活塞杆的端部与所述吸隔板机构固定连接,通过所述第二伸缩气缸带动所述吸隔板机构进行上下移动。
9、作为本技术方案的进一步改进,所述吸隔板机构包括工作板和设置在所述工作板上的多个负压吸头,所述负压吸头朝下的端部设置有用于吸附所述隔板的吸合面。
10、作为本技术方案的进一步改进,所述驱动机构包括第三伸缩气缸、齿条以及滑块,所述机架下方设置有安装座,所述第三伸缩气缸和滑块分别设置在所述安装座上,所述第三伸缩气缸活塞杆的端部与活动连接在所述滑块内的所述齿条固定连接,所述齿条用于与所述机械臂工作轴底端设置有齿圈啮合,通过所述第三伸缩气缸带动所述齿条沿所述滑块直线运动,从而使得所述机械臂工作轴旋转。
11、一种包管机,包括供料机构、卸料机构、隔板放置架以及如上所述的机械臂组件,所述供料机构包含料杆用于存放待包管的锯片,所述卸料机构包含料杆用于存放包管好的锯片,所述隔板放置架包含料杆用于存放隔板。
12、与现有技术相比,本实用新型的有益效果:
13、通过对包管机以及机械臂组件结构的优化,由机械臂组件上增加的第三机械手取出隔板,并存放在隔板放置架上,从而避免人工取出隔板,能有效解决现有技术中存在的问题。
技术特征:
1.一种机械臂组件,其特征在于,包括驱动机构、机械臂工作轴、机械臂安装轴套、第一机械手、第二机械手以及第三机械手,所述机械臂安装轴套用于安装在机架的顶部,所述机械臂工作轴可旋转的设置在所述机械臂安装轴套内,所述机械臂工作轴的底端贯穿所述机架的顶部与设置在所述机架内的所述驱动机构传动连接,所述驱动机构用于带动所述机械臂工作轴旋转;所述机械臂工作轴的顶端穿出所述机械臂安装轴套,设置有所述第一机械手、第二机械手以及第三机械手,所述第一机械手用于包管好锯片的下料,所述第二机械手用于待包管锯片的上料,所述第三机械手用于去除待包管锯片之间的隔板。
2.根据权利要求1所述的一种机械臂组件,其特征在于:所述机械臂工作轴的顶端设置有安装板,所述安装板呈t字形结构,包括第一延伸板、第二延伸板以及第三延伸板,所述第一延伸板与第三延伸板水平连接形成条状板,所述第二延伸板垂直于所述条状板,所述第一机械手设置在所述第一延伸板上,所述第二机械手设置在所述第二延伸板上,所述第三机械手设置在所述第三延伸板上,所述第一机械手、第二机械手以及第三机械手到所述机械臂工作轴的距离均相等。
3.根据权利要求1所述的一种机械臂组件,其特征在于:所述机械臂工作轴的顶端设置有安装板,所述安装板由两个相互垂直的延伸板组成,分别是第一延伸板和第二延伸板,所述第一机械手设置在所述第一延伸板上,所述第二机械手设置在所述第二延伸板上;所述机械臂工作轴的顶端在位于所述安装板上方/下方的部分可拆卸的设置有第三延伸板,并且所述第三延伸板与所述第一延伸板平行,所述第三机械手设置在所述第三延伸板上,所述第一机械手、第二机械手以及第三机械手到所述机械臂工作轴的距离均相等。
4.根据权利要求2所述的一种机械臂组件,其特征在于:所述机械臂安装轴套的顶部设置有限位板,所述限位板的两端分别设置有缓冲限位杆和第一接近开关,所述缓冲限位杆用于与所述安装板接触的端部设置有缓冲胶垫;所述限位板一端的所述缓冲限位杆用于限止所述安装板顺时针旋转,该端的所述第一接近开关用于接收和反馈所述安装板的位置信息给外部控制器;所述限位板另一端的所述缓冲限位杆用于限止所述安装板逆时针旋转,该端的所述第一接近开关用于接收和反馈所述安装板的位置信息给外部控制器。
5.根据权利要求3所述的一种机械臂组件,其特征在于:所述第一机械手与第二机械手结构相同,所述第一机械手包括第一伸缩气缸、取卸片机构、导柱以及导套,所述第一伸缩气缸垂直设置在所述第一延伸板上,其活塞杆的端部贯穿所述第一延伸板与所述取卸片机构连接,所述导套设置在所述第一延伸板上,所述导柱设置在所述取卸片机构上,所述导柱与所述导套配合连接,通过所述第一伸缩气缸带动所述取卸片机构沿所述导柱进行上下移动。
6.根据权利要求5所述的一种机械臂组件,其特征在于:所述取卸片机构包括电磁吸盘、第二接近开关、连接板和移动板,所述连接板的一端设置有避让孔,所述避让孔用于避让供片机构/卸料机构上的料杆,所述电磁吸盘设置在所述连接板上并位于所述避让孔的下方,所述连接板的另一端与所述移动板固定连接,所述移动板与所述第一伸缩气缸的活塞杆固定连接,所述导柱设置在所述移动板上,所述第二接近开关设置在所述连接板上,所述第二接近开关用于接收和反馈锯片的位置信息给外部控制器。
7.根据权利要求3所述的一种机械臂组件,其特征在于:所述第三机械手包括第二伸缩气缸和吸隔板机构,所述第二伸缩气缸垂直设置在所述第三延伸板的端部,其活塞杆的端部与所述吸隔板机构固定连接,通过所述第二伸缩气缸带动所述吸隔板机构进行上下移动。
8.根据权利要求7所述的一种机械臂组件,其特征在于:所述吸隔板机构包括工作板和设置在所述工作板上的多个负压吸头,所述负压吸头朝下的端部设置有用于吸附所述隔板的吸合面。
9.根据权利要求1所述的一种机械臂组件,其特征在于:所述驱动机构包括第三伸缩气缸、齿条以及滑块,所述机架下方设置有安装座,所述第三伸缩气缸和滑块分别设置在所述安装座上,所述第三伸缩气缸活塞杆的端部与活动连接在所述滑块内的所述齿条固定连接,所述齿条用于与所述机械臂工作轴底端设置有齿圈啮合,通过所述第三伸缩气缸带动所述齿条沿所述滑块直线运动,从而使得所述机械臂工作轴旋转。
10.一种包管机,包括供料机构和卸料机构,其特征在于,还包括隔板放置架以及权利要求1-9任一所述的机械臂组件,所述供料机构包含料杆用于存放待包管的锯片,所述卸料机构包含料杆用于存放包管好的锯片,所述隔板放置架包含料杆用于存放隔板。
技术总结
本技术涉及锯片包装技术领域,具体地说,涉及一种包管机,包括供料机构、卸料机构、隔板放置架以及机械臂组件,隔板放置架用于存放隔板,机械臂组件包括驱动机构、机械臂工作轴、机械臂安装轴套、第一机械手、第二机械手以及第三机械手,机械臂安装轴套用于安装在机架的顶部,机械臂工作轴可旋转的设置在机械臂安装轴套内,机械臂工作轴的底端贯穿机架的顶部与设置在其内的驱动机构传动连接,驱动机构用于带动机械臂工作轴旋转;机械臂工作轴的顶端穿出机械臂安装轴套设置有第一机械手、第二机械手以及第三机械手,第一机械手用于下料,第二机械手用于上料,第三机械手用于去除隔板;避免人工取出隔板,能有效解决现有技术中存在的问题。
技术研发人员:何小宝
受保护的技术使用者:丹阳市宝利锯业机械有限公司
技术研发日:20221230
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!