一种仓储机器人的制作方法
本技术涉及仓储,具体为一种仓储机器人。
背景技术:
1、仓储机器人是在物流仓储和生产仓库等室内环境中用于货物出入库时进行搬运、分拣和拣选等操作的机器人,通过仓储机器人可以大大提高货物出入库的效率。
2、目前有一些仓储机器人主要是对货架上的货物进行取放和转移,其上设置有多个支撑板用于放置包装好的货物,然后支撑板的四周缺少防护结构,且这种仓储机器人的高度一般都比较高,在缺少防护结构的情况下容易使得仓储机器人在移动过程中因遇到障碍物而失去平衡从而导致货物掉落,进而造成损失。因此我们对此做出改进,提出一种仓储机器人。
技术实现思路
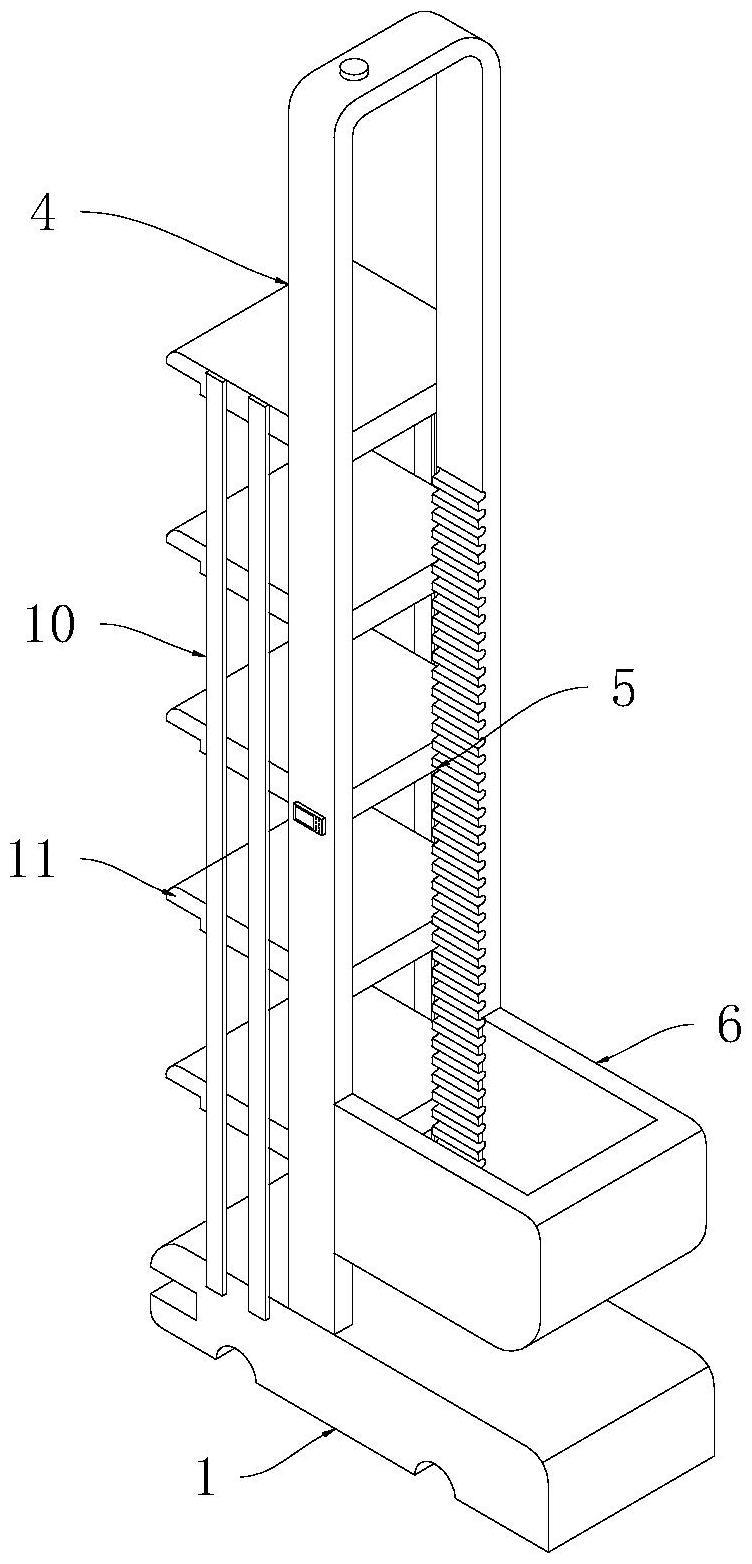
1、本实用新型提供了一种仓储机器人,包括支撑底座,所述支撑底座的顶面固定设置有u形框,所述u形框上间隔设置有多个支撑板,且u形框的一侧设置有移动框,所述支撑板延伸至u形框的一侧,所述支撑板的底端开设有开口,所述开口处转动设置有啮合传动的大齿轮和小齿轮,且大齿轮上固定设置有调节板;所述移动框呈u形,且移动框的侧壁上对称开设有气缸一,所述气缸一的伸缩端固定安装有连接块,所述连接块的相对面安装有气缸二,且气缸二的伸缩端安装有挡板;所述支撑底座的内部安装有红外传感器,且支撑底座的底端安装有万向轮;所述u形框上安装有控制开关和警报灯。
2、作为本实用新型的一种优选技术方案,所述u形框的侧壁上对称安装有齿条,所述移动框朝向u形框的侧壁内安装有电机一,所述电机一的输出端固定设置有转轴,所述转轴上固定套设有与齿条啮合传动的驱动齿轮。
3、作为本实用新型的一种优选技术方案,所述大齿轮和小齿轮均通过连接轴转动设置在支撑板上,所述支撑板上还安装有电机二,且电机二的输出端与固定套设有小齿轮的连接轴固定设置。
4、作为本实用新型的一种优选技术方案,多个所述支撑板的侧面均安装有限位板,所述调节板的长度小于相邻的两块支撑板之间的距离。
5、作为本实用新型的一种优选技术方案,所述u形框的侧壁上对称开设有滑槽,所述滑槽内滑动设置有滑块,所述转轴的一端位于滑块内并与滑块转动连接。
6、作为本实用新型的一种优选技术方案,所述支撑底座内开设有空腔,且空腔内安装有双向电机,所述双向电机的输出端均固定设置有驱动轴一,所述驱动轴一上均套设有锥齿轮一。
7、作为本实用新型的一种优选技术方案,所述支撑底座内转动设置有多个驱动轴二和驱动轴三,所述驱动轴二和驱动轴三上下设置,且驱动轴二和驱动轴三上均固定设置有链轮,且链轮之间通过链条传动。
8、作为本实用新型的一种优选技术方案,所述驱动轴二上还固定设置有与锥齿轮一啮合传动的锥齿轮二,所述万向轮设置在驱动轴三上。
9、本实用新型的有益效果是:通过设置的红外传感器可以感应到障碍物,从而通过警报灯发出警报用于提醒;通过设置的限位板和调节板可以对支撑板四周进行防护,从而防止货物从支撑板上掉落而造成不必要的损失。
技术特征:
1.一种仓储机器人,包括支撑底座(1),所述支撑底座(1)的顶面固定设置有u形框(4),所述u形框(4)上间隔设置有多个支撑板(11),且u形框(4)的一侧设置有移动框(6),其特征在于,所述支撑板(11)延伸至u形框(4)的一侧,所述支撑板(11)的底端开设有开口,所述开口处转动设置有啮合传动的大齿轮(14)和小齿轮(15),且大齿轮(14)上固定设置有调节板(17);所述移动框(6)呈u形,且移动框(6)的侧壁上对称开设有气缸一(7),所述气缸一(7)的伸缩端固定安装有连接块,所述连接块的相对面安装有气缸二(8),且气缸二(8)的伸缩端安装有挡板(9);所述支撑底座(1)的内部安装有红外传感器(3),且支撑底座(1)的底端安装有万向轮(2);所述u形框(4)上安装有控制开关和警报灯。
2.根据权利要求1所述的一种仓储机器人,其特征在于,所述u形框(4)的侧壁上对称安装有齿条(5),所述移动框(6)朝向u形框(4)的侧壁内安装有电机一(13),所述电机一(13)的输出端固定设置有转轴,所述转轴上固定套设有与齿条(5)啮合传动的驱动齿轮(12)。
3.根据权利要求1所述的一种仓储机器人,其特征在于,所述大齿轮(14)和小齿轮(15)均通过连接轴转动设置在支撑板(11)上,所述支撑板(11)上还安装有电机二(16),且电机二(16)的输出端与固定套设有小齿轮(15)的连接轴固定设置。
4.根据权利要求1所述的一种仓储机器人,其特征在于,多个所述支撑板(11)的侧面均安装有限位板(10),所述调节板(17)的长度小于相邻的两块支撑板(11)之间的距离。
5.根据权利要求2所述的一种仓储机器人,其特征在于,所述u形框(4)的侧壁上对称开设有滑槽,所述滑槽内滑动设置有滑块,所述转轴的一端位于滑块内并与滑块转动连接。
6.根据权利要求1所述的一种仓储机器人,其特征在于,所述支撑底座(1)内开设有空腔,且空腔内安装有双向电机,所述双向电机的输出端均固定设置有驱动轴一,所述驱动轴一上均套设有锥齿轮一。
7.根据权利要求6所述的一种仓储机器人,其特征在于,所述支撑底座(1)内转动设置有多个驱动轴二和驱动轴三,所述驱动轴二和驱动轴三上下设置,且驱动轴二和驱动轴三上均固定设置有链轮,且链轮之间通过链条传动。
8.根据权利要求7所述的一种仓储机器人,其特征在于,所述驱动轴二上还固定设置有与锥齿轮一啮合传动的锥齿轮二,所述万向轮(2)设置在驱动轴三上。
技术总结
本技术涉及仓储技术领域,具体为一种仓储机器人,包括支撑底座,支撑底座的顶面固定设置有U形框,U形框上间隔设置有多个支撑板,且U形框的一侧设置有移动框,支撑板的底端开设有开口,开口处转动设置有啮合传动的大齿轮和小齿轮,且大齿轮上固定设置有调节板;移动框的侧壁上对称开设有气缸一,气缸一的伸缩端固定安装有连接块,连接块的相对面安装有气缸二,且气缸二的伸缩端安装有挡板;U形框上安装有控制开关和警报灯。本技术通过设置的红外传感器可以感应到障碍物,从而通过警报灯发出警报用于提醒;通过设置的限位板和调节板可以对支撑板四周进行防护,从而防止货物从支撑板上掉落而造成不必要的损失。
技术研发人员:季翎,姜春和
受保护的技术使用者:南京智徐鑫科技有限公司
技术研发日:20221229
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!