一种机器人码垛装置的制作方法
本技术涉及码垛设备,特别是涉及一种机器人码垛装置。
背景技术:
1、在生产流水线中将包装好的物品码垛摆放不仅提高运输效率,还节约了占地面积,通常使用码垛机器人完成码垛操作,其主要通过移动调节总成、方向调节总成控制机械臂移动,利用吸盘组件吸起包装箱,如在专利号为cn217707891u的一种桁架式高速码垛机械手中,其通过机械臂配合真空泵实现全自动码垛,提高了码垛工作效率,并且通过吸盘固定物品改善了夹持效果,但是现有技术中仍存在以下问题:
2、1、其真空吸盘架为一体结构,在夹持物品时需要整体升降,吸附物品进行码垛,容易出现某一阶段吸盘架的下方没有物品,但机械臂仍带动整体吸盘架升降,导致其对物品的码垛精准度较低,无法对物品传送过程中产生的位置变化做出调整。
3、2、并且其将吸附起的物品码放到传送带的一侧,由于其对物品的码垛精准度较低,码垛后的物品没有有效的整理,导致堆叠的物品容易倾倒,造成经济损坏甚至出现安全隐患。因此亟待一种机器人码垛装置,不仅能对物品位置变化能做出有效调整,增强对物品吸附码垛的精准度,并能对码垛堆叠的物品进行整理,提高机器人码垛的工作效率。
技术实现思路
1、本实用新型的目的是提供一种机器人码垛装置,以解决上述现有技术存在的问题。
2、为实现上述目的,本实用新型提供了如下方案:本实用新型提供一种机器人码垛装置,包括传送带,还包括,
3、支架,所述传送带穿设在所述支架内;
4、若干吸附爪,设置在所述支架顶端,所述吸附爪相对于所述传送带升降;
5、支撑杆,所述支撑杆架设在所述支架顶端,若干所述吸附爪依次等间距的设置在所述支撑杆上,所述吸附爪通过所述支撑杆与所述支架滑动连接;
6、感应件,设置在所述传送带底端,所述感应件包括若干压力传感器,所述压力传感器设置在所述传送带底端,所述压力传感器与所述吸附爪对应设置,所述压力传感器用于驱动所述吸附爪升降;
7、整箱组件,设置在所述传送带的一侧,所述整箱组件包括若干托盘和若干毛刷辊,所述托盘放置在所述传送带的一侧与所述吸附爪对应设置,所述托盘的一侧固接有支撑板,所述托盘上远离所述支撑板的另一侧设置有毛刷辊,所述毛刷辊相对于所述托盘升降。
8、优选的,所述传送带下方水平固接有固定板,所述固定板的两端分别固接在所述支架的两侧,所述固定板的顶端固接有所述压力传感器,所述压力传感器的顶端与所述传送带的底端接触,所述吸附爪的顶端设置有升降件,所述吸附爪通过所述升降件与所述支撑杆滑动连接,所述压力传感器与所述升降件电性连接。
9、优选的,所述升降件包括伺服电机,所述伺服电机固接在所述支撑杆上,所述伺服电机的输出端设置有滑杆,所述滑杆竖直穿设在所述支撑杆上,所述滑杆的底端贯穿所述支撑杆与所述吸附爪固接,所述滑杆的顶端伸出所述支撑杆,且所述滑杆的一侧开设有齿槽,所述伺服电机输出端固接有与所述齿槽啮合的齿轮,所述吸附爪通过所述伺服电机和所述滑杆与所述支撑杆滑动连接。
10、优选的,所述压力传感器通过控制线与所述伺服电机的控制端连接,所述伺服电机通过所述压力传感器控制开闭。
11、优选的,所述固定板的底端设置有若干固定柱,若干所述固定柱竖直固接在所述固定板的底端,且所述固定柱设置在所述托盘远离所述支撑板的一侧,所述固定柱上开设有滑槽,所述滑槽内设置有升降气缸,所述毛刷辊通过所述升降气缸和所述固定柱与所述托盘升降。
12、优选的,所述毛刷辊与所述支撑板水平设置,且所述毛刷辊与所述固定柱垂直,所述毛刷辊的一端伸入所述滑槽内与所述升降气缸的升降端固接。
13、优选的,所述支撑杆的一端固接有滑块,所述滑块底端与所述支架顶端对应开设有凹槽,所述支架的顶端伸入所述凹槽内,所述滑块远离所述支撑杆的一端固接有驱动电机,所述驱动电机输出端与所述支架顶端传动连接,所述支撑杆通过所述驱动电机和所述滑块与所述支架滑动连接。
14、优选的,所述支架顶端固接有若干导轨,所述导轨与所述支撑杆垂直,所述导轨中间开设有通槽,所述吸附爪设置在所述通槽内,所述吸附爪与所述导轨滑动连接,所述支撑杆底端对应所述导轨的两侧开设有嵌槽,所述导轨的顶端伸入所述嵌槽内与所述支撑杆滑动连接。
15、本实用新型公开了以下技术效果:
16、本实用新型通过在传送带外部设置支架,利用支架使吸附爪能够设置在传送带上方,并且将吸附爪对应包装箱,然后利用压力传感器,当包装箱运行到压力传感器上方,即包装箱传送至与吸附爪底端对应时,压力传感器接受到压力变化,才驱动吸附爪下降将包装箱夹持搬运,及时对物品位置变化做出有效调整,增强对物品吸附码垛的精准度,并通过支撑杆移动多个吸附爪将包装箱夹持到托盘顶端进行码垛,在不断码垛过程中,随着包装箱堆叠升降,通过支撑板和毛刷辊整理包装箱,使其码垛整体不易倾倒,通过对码垛堆叠的物品进行整理,提高机器人码垛的工作效率。
技术特征:
1.一种机器人码垛装置,包括传送带(4),其特征在于:还包括,
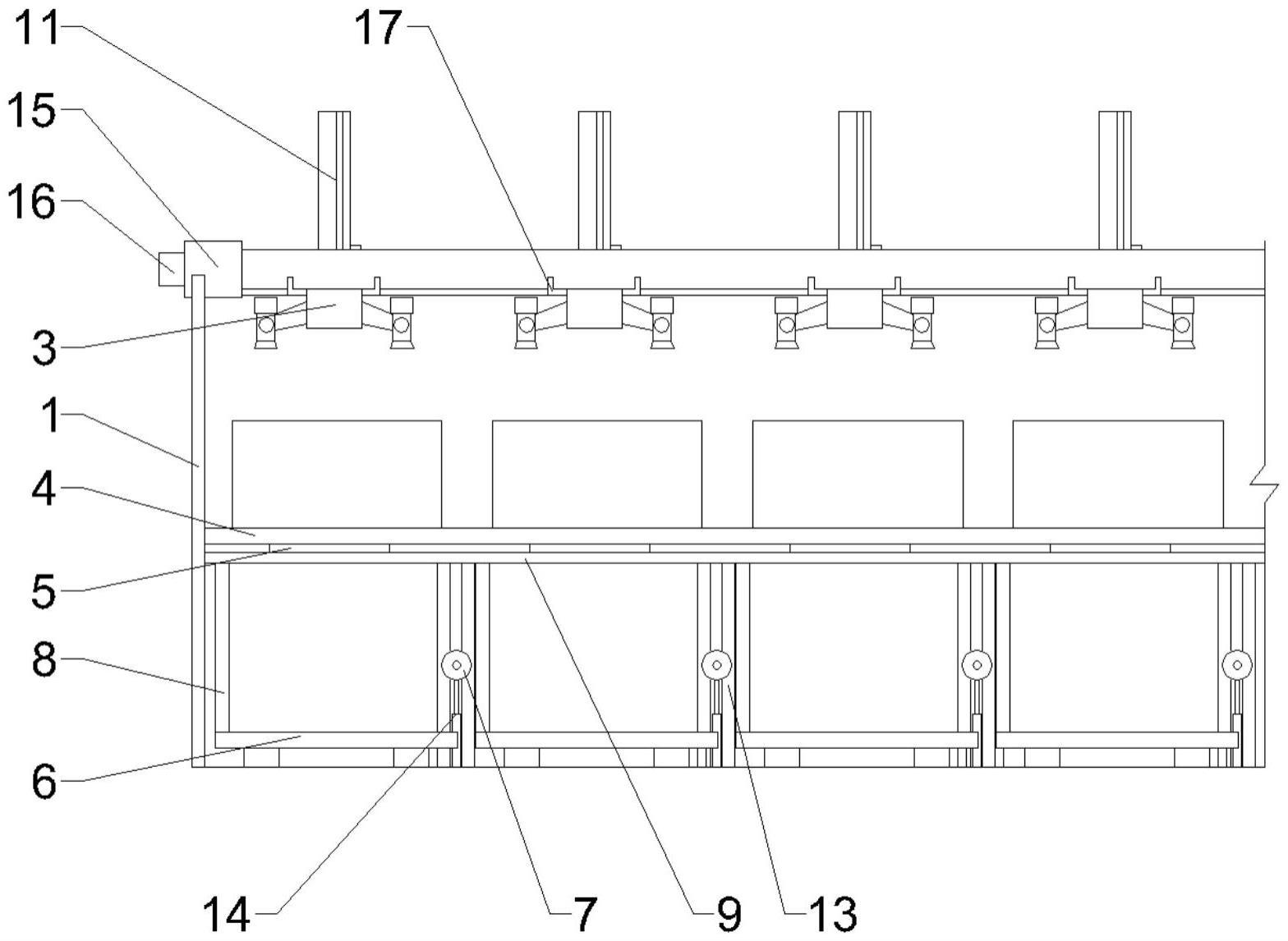
2.根据权利要求1所述的机器人码垛装置,其特征在于:所述传送带(4)下方水平固接有固定板(9),所述固定板(9)的两端分别固接在所述支架(1)的两侧,所述固定板(9)的顶端固接有所述压力传感器(5),所述压力传感器(5)的顶端与所述传送带(4)的底端接触,所述吸附爪(3)的顶端设置有升降件,所述吸附爪(3)通过所述升降件与所述支撑杆(2)滑动连接,所述压力传感器(5)与所述升降件电性连接。
3.根据权利要求2所述的机器人码垛装置,其特征在于:所述升降件包括伺服电机(10),所述伺服电机(10)固接在所述支撑杆(2)上,所述伺服电机(10)的输出端设置有滑杆(11),所述滑杆(11)竖直穿设在所述支撑杆(2)上,所述滑杆(11)的底端贯穿所述支撑杆(2)与所述吸附爪(3)固接,所述滑杆(11)的顶端伸出所述支撑杆(2),且所述滑杆(11)的一侧开设有齿槽,所述伺服电机(10)输出端固接有与所述齿槽啮合的齿轮(12),所述吸附爪(3)通过所述伺服电机(10)和所述滑杆(11)与所述支撑杆(2)滑动连接。
4.根据权利要求3所述的机器人码垛装置,其特征在于:所述压力传感器(5)通过控制线与所述伺服电机(10)的控制端连接,所述伺服电机(10)通过所述压力传感器(5)控制开闭。
5.根据权利要求2所述的机器人码垛装置,其特征在于:所述固定板(9)的底端设置有若干固定柱(13),若干所述固定柱(13)竖直固接在所述固定板(9)的底端,且所述固定柱(13)设置在所述托盘(6)远离所述支撑板(8)的一侧,所述固定柱(13)上开设有滑槽,所述滑槽内设置有升降气缸(14),所述毛刷辊(7)通过所述升降气缸(14)和所述固定柱(13)与所述托盘(6)升降。
6.根据权利要求5所述的机器人码垛装置,其特征在于:所述毛刷辊(7)与所述支撑板(8)水平设置,且所述毛刷辊(7)与所述固定柱(13)垂直,所述毛刷辊(7)的一端伸入所述滑槽内与所述升降气缸(14)的升降端固接。
7.根据权利要求1所述的机器人码垛装置,其特征在于:所述支撑杆(2)的一端固接有滑块(15),所述滑块(15)底端与所述支架(1)顶端对应开设有凹槽,所述支架(1)的顶端伸入所述凹槽内,所述滑块(15)远离所述支撑杆(2)的一端固接有驱动电机(16),所述驱动电机(16)输出端与所述支架(1)顶端传动连接,所述支撑杆(2)通过所述驱动电机(16)和所述滑块(15)与所述支架(1)滑动连接。
8.根据权利要求1所述的机器人码垛装置,其特征在于:所述支架(1)顶端固接有若干导轨(17),所述导轨(17)与所述支撑杆(2)垂直,所述导轨(17)中间开设有通槽,所述吸附爪(3)设置在所述通槽内,所述吸附爪(3)与所述导轨(17)滑动连接,所述支撑杆(2)底端对应所述导轨(17)的两侧开设有嵌槽,所述导轨(17)的顶端伸入所述嵌槽内与所述支撑杆(2)滑动连接。
技术总结
本技术公开一种机器人码垛装置,包括传送带穿设在支架内;若干吸附爪,设置在支架顶端,吸附爪相对于传送带升降;支撑杆,支撑杆架设在支架顶端,若干吸附爪依次等间距的设置在支撑杆上,吸附爪通过支撑杆与支架滑动连接;若干压力传感器设置在传送带底端,压力传感器与吸附爪对应设置,压力传感器用于驱动吸附爪升降;整箱组件,设置在传送带的一侧,整箱组件包括若干托盘和若干毛刷辊,托盘放置在传送带的一侧与吸附爪对应设置,托盘的一侧固接有支撑板,托盘上远离支撑板的另一侧设置有毛刷辊,毛刷辊相对于托盘升降。本技术能够增强对物品吸附码垛的精准度,并能对码垛堆叠的物品进行整理,提高机器人码垛的工作效率。
技术研发人员:季现军
受保护的技术使用者:廊坊永创包装机械有限公司
技术研发日:20221230
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!