一种开袋机构及应用其的自动套袋机的制作方法
本技术涉及机械设备领域,特别涉及一种开袋机构及应用其的自动套袋机。
背景技术:
1、包装盒或者包装箱应用非常广泛,很多包装盒或者包装箱为了满足应用需求,需要在包装盒或者包装箱的外面套装柔性外包袋(一般为塑料袋),比如瓶装酒包装盒、快递箱等,最后需要套装柔性外包袋以保护包装盒表面不被刮花,同时具有防尘作用。
2、传统的包装盒或者包装箱套袋方式为手工操作,工作人员用手将包装盒或者包装箱装入柔性外包袋内,这种传统套袋方式费时费力、效率低下,而且难以与整个生产线配合形成自动化系统,不利于包装盒的智能化、自动化、规模化生产。
技术实现思路
1、本实用新型的目的是提供一种结构简单、装配方便的开袋机构,以及一种结构简单的自动套袋机,至少能够解决上述问题之一。
2、根据本实用新型的一个方面,提供了一种开袋机构,至少包括:
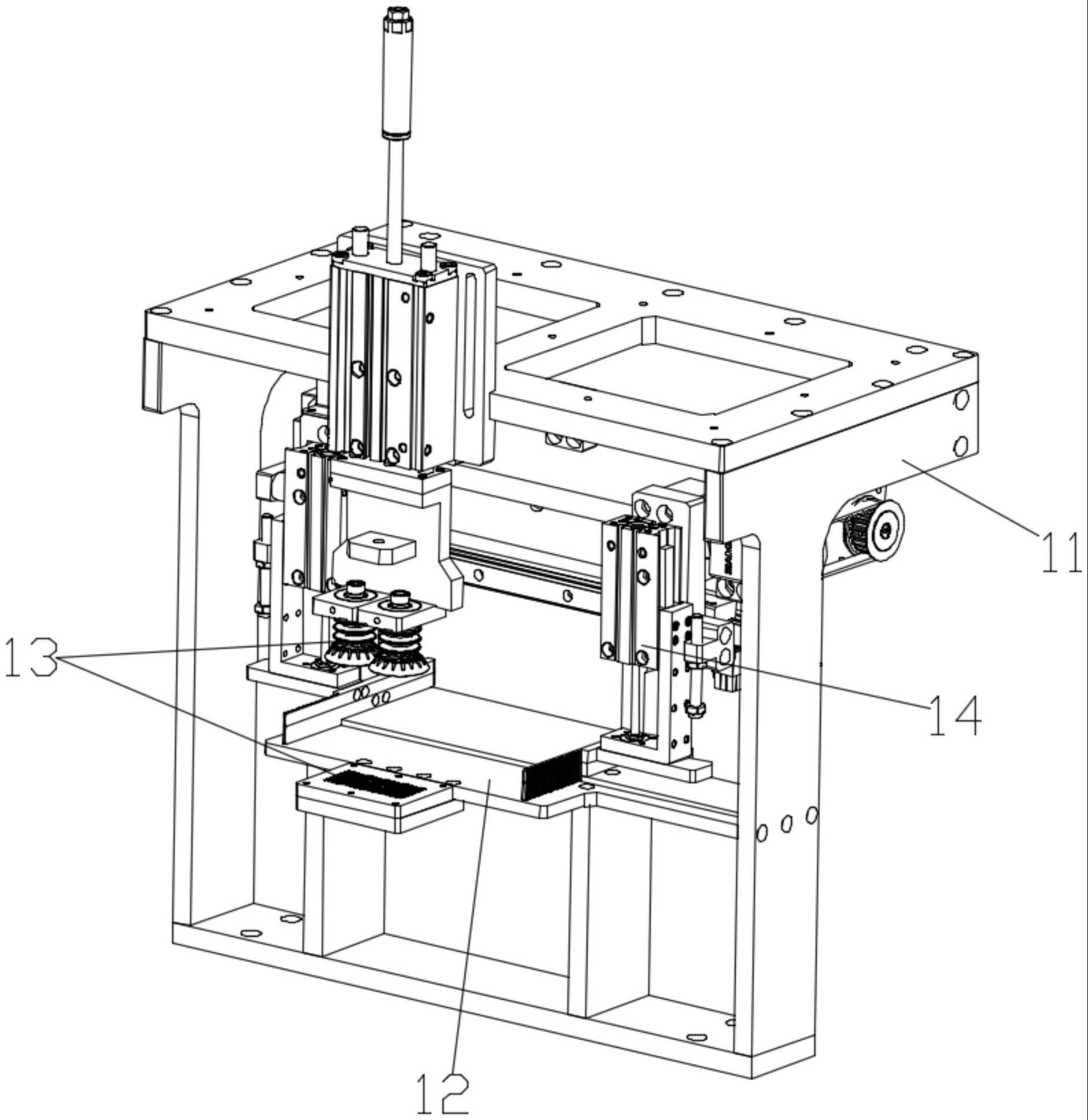
3、第一安装架;
4、过袋板,安装于第一安装架且用于对包装袋进行支撑;
5、吸附组件,安装于第一安装架且与包装袋相配合,用于从上下方向打开包装袋;
6、撑开组件,安装于第一安装架且与包装袋相配合,用于从两侧撑开包装袋;
7、撑开组件包括第一安装板以及安装于第一安装板的第一驱动件、皮带传动模组、丝杆螺母导向模组和一对撑开件,皮带传动模组与第一驱动件动力连接,丝杆螺母导向模组与皮带传动模组传动连接,一对撑开件安装于丝杆螺母导向模组且与包装袋相配合,在第一驱动件的驱动下,一对撑开件能够相互靠近或者相互远离。
8、由此,本实用新型提供了一种全新结构的开袋机构,该开袋机构的工作原理为:包装袋被运输至过袋板后,先通过吸附组件将包装袋打开,然后撑开组件开始工作,一对撑开件先伸入至包装袋内,然后第一驱动件驱动皮带传动模组工作,使得丝杆螺母导向模组带动一对撑开件往两侧移动将包装袋撑开,后续通过将纸盒或者包装箱等物品放入包装袋后,一对撑开件回缩并复位,等待下一次循环。
9、本实用新型的开袋机构能够实现包装袋的自动开袋工作,相对于人工手动进行开袋,工作效率高,满足大批量生产;更为重要地是,采用丝杆螺母导向模组进行传动和导向,运行平稳,故障率低。
10、在一些实施方式中,丝杆螺母导向模组包括一对安装支座、通过一对安装支座可转动地安装于第一安装板的丝杆以及可活动地套装于丝杆外周的一对螺母,一对撑开件对应安装于一对螺母远离丝杆的一侧,丝杆的其中一端部与皮带传动模组传动连接。由此,皮带传动模组带动丝杆转动,进而带动一对撑开件沿着丝杆相互靠近或者相互远离,实现撑开件的张开或者闭合动作。
11、在一些实施方式中,皮带传动模组包括主动轮、从动轮和传动皮带,主动轮套装于第一驱动件的驱动端,从动轮套装于丝杆的其中一端部,传动皮带套装于主动轮和从动轮的外周。由此,第一驱动件驱动主动轮旋转,通过传动皮带带动从动轮旋转,进而带动丝杆一起转动。
12、在一些实施方式中,撑开组件还包括一对第二驱动件,一对第二驱动件安装于丝杆螺母导向模组,一对撑开件对应安装于一对第二驱动件的驱动端。由此,第二驱动件可以实现撑开件的高度方向的伸缩,完成高度方向的调节。
13、在一些实施方式中,撑开组件还包括滑块导轨导向模组,滑块导轨导向模组包括安装于第一安装板且与丝杆相平行的直线导轨以及可滑动地套装于直线导轨外周的一对滑块,一对第二驱动件同时安装于一对螺母、一对滑块上。由此,一对撑开件在相互靠近或者相互远离过程中,一对滑块也对应在直线导轨上滑动,稳定性高。
14、在一些实施方式中,撑开组件还包括第三驱动件和导向杆,第一安装板通过导向杆可活动地安装于第一安装架,第三驱动件安装于第一安装架且驱动端与第一安装板连接。由此,第三驱动件用于实现对第一安装板以及安装于第一安装板上的部件一起前后移动,完成撑开件相对于包装袋的伸入和伸出动作;导向杆起到导向作用,使得运行平稳。
15、在一些实施方式中,吸附组件包括下吸咀和上吸咀,下吸咀安装于过袋板且与包装袋的下袋体部分相配合,上吸咀安装于第一安装架且与包装袋的上袋体部分相配合。
16、在一些实施方式中,吸附组件还包括用于驱动上吸咀升降的第四驱动件,第四驱动件安装于第一安装架,上吸咀安装于第四驱动件的驱动端。由此,可实现上吸咀在高度方向上的进给。
17、根据本实用新型的另一个方面,还提供了一种自动套袋机,包括上述的开袋机构,还包括第一输送机构,第一输送机构设置于开袋机构的前方,用于运输待开袋的包装袋至过袋板处。
18、由此,本实用新型的自动套袋机应用了上述开袋机构,能够实现自动开袋,生产效率高。
19、在一些实施方式中,自动套袋机还包括第二输送机构和推料机构,第二输送机构安装于开袋机构的后方,用于运输待包装的物件,推料机构安装于开袋机构的后方且与开袋机构相配合,用于将待包装的物件推送至经开袋机构打开后的包装袋内。由此,包装盒、快递箱等待包装的物件通过第二输送机构运输至推料机构处,且此时待包装的物件正好位于过袋板的后方,推料机构推送待包装的物件至过袋板,待包装的物件被塞入经开袋机构打开后的包装袋内。
20、本实用新型的有益效果:
21、本实用新型的开袋机构能够实现包装袋的自动开袋工作,相对于人工手动进行开袋,工作效率高,满足大批量生产;更为重要地是,采用丝杆螺母导向模组进行传动和导向,运行平稳,故障率低。
22、本实用新型的自动套袋机应用了上述开袋机构,能够实现自动开袋,生产效率高。
技术特征:
1.一种开袋机构,其特征在于,至少包括:
2.根据权利要求1所述的开袋机构,其特征在于,所述丝杆螺母导向模组(144)包括一对安装支座(1441)、通过一对安装支座(1441)可转动地安装于所述第一安装板(141)的丝杆(1442)以及可活动地套装于所述丝杆(1442)外周的一对螺母(1443),一对所述撑开件(145)对应安装于一对所述螺母(1443)远离所述丝杆(1442)的一侧,所述丝杆(1442)的其中一端部与所述皮带传动模组(143)传动连接。
3.根据权利要求2所述的开袋机构,其特征在于,所述皮带传动模组(143)包括主动轮(1431)、从动轮(1432)和传动皮带(1433),所述主动轮(1431)套装于所述第一驱动件(142)的驱动端,所述从动轮(1432)套装于所述丝杆(1442)的其中一端部,所述传动皮带(1433)套装于所述主动轮(1431)和从动轮(1432)的外周。
4.根据权利要求3所述的开袋机构,其特征在于,所述撑开组件(14)还包括一对第二驱动件(146),一对所述第二驱动件(146)安装于所述丝杆螺母导向模组(144),一对所述撑开件(145)对应安装于一对所述第二驱动件(146)的驱动端。
5.根据权利要求4所述的开袋机构,其特征在于,所述撑开组件(14)还包括滑块导轨导向模组(147),所述滑块导轨导向模组(147)包括安装于所述第一安装板(141)且与所述丝杆(1442)相平行的直线导轨(1471)以及可滑动地套装于所述直线导轨(1471)外周的一对滑块(1472),一对所述第二驱动件(146)同时安装于一对所述螺母(1443)、一对所述滑块(1472)上。
6.根据权利要求1~5任一项所述的开袋机构,其特征在于,所述撑开组件(14)还包括第三驱动件(148)和导向杆(149),所述第一安装板(141)通过所述导向杆(149)可活动地安装于所述第一安装架(11),所述第三驱动件(148)安装于所述第一安装架(11)且驱动端与所述第一安装板(141)连接。
7.根据权利要求1~5任一项所述的开袋机构,其特征在于,所述吸附组件(13)包括下吸咀(131)和上吸咀(132),所述下吸咀(131)安装于所述过袋板(12)且与所述包装袋(5)的下袋体部分相配合,所述上吸咀(132)安装于所述第一安装架(11)且与所述包装袋(5)的上袋体部分相配合。
8.根据权利要求7所述的开袋机构,其特征在于,所述吸附组件(13)还包括用于驱动所述上吸咀(132)升降的第四驱动件(133),所述第四驱动件(133)安装于所述第一安装架(11),所述上吸咀(132)安装于所述第四驱动件(133)的驱动端。
9.一种自动套袋机,包括如权利要求1~8任一项所述的开袋机构(1),其特征在于,还包括第一输送机构(2),所述第一输送机构(2)设置于所述开袋机构(1)的前方,用于运输待开袋的包装袋(5)至过袋板(12)处。
10.根据权利要求9所述的自动套袋机,其特征在于,还包括第二输送机构(3)和推料机构(4),所述第二输送机构(3)安装于所述开袋机构(1)的后方,用于运输待包装的物件,所述推料机构(4)安装于所述开袋机构(1)的后方且与所述开袋机构(1)相配合,用于将所述待包装的物件推送至经所述开袋机构(1)打开后的包装袋(5)内。
技术总结
本技术公开了一种开袋机构,至少包括:第一安装架;过袋板;吸附组件;撑开组件;撑开组件包括第一安装板以及安装于第一安装板的第一驱动件、皮带传动模组、丝杆螺母导向模组和一对撑开件,皮带传动模组与第一驱动件动力连接,丝杆螺母导向模组与皮带传动模组传动连接,一对撑开件安装于丝杆螺母导向模组且与包装袋相配合。还公开了一种自动套袋机,包括上述开袋机构,还包括第一输送机构,第一输送机构设置于开袋机构的前方。本开袋机构能够实现包装袋的自动开袋工作,相对于人工手动进行开袋,工作效率高,满足大批量生产;采用丝杆螺母导向模组进行传动和导向,运行平稳,故障率低。自动套袋机应用了该开袋机构,自动化程度高,生产效率高。
技术研发人员:陈宗渝,段耀华
受保护的技术使用者:深圳双诚智能包装设备有限公司
技术研发日:20221230
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!