一种实现不同尺寸规格元件精准搬运的偏移修复机构的制作方法
本发明涉及元件搬运,更具体地说,本发明涉及一种实现不同尺寸规格元件精准搬运的偏移修复机构。
背景技术:
1、对元件加工过程中,一个元件需要完成多道工序的加工,在对元件进行不同工序的加工过程中,需要更换不同的载具来放置元件,从而方便加工,当元件从第一个载具搬运到第二个载具上时,由于两个载具上放置元件的元件槽的角度存在差别,需要在搬运过程中对元件的位置进行校准,否则元件在从第一个元件转移到第二个元件上时,无法准确对准在第二个载具的元件槽内;目前这一校准工作为人工操作。因此,有必要提出一种实现不同尺寸规格元件精准搬运的偏移修复机构,以至少部分地解决现有技术中存在的问题。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、为至少部分地解决上述问题,本发明提供了一种实现不同尺寸规格元件精准搬运的偏移修复机构,包括:
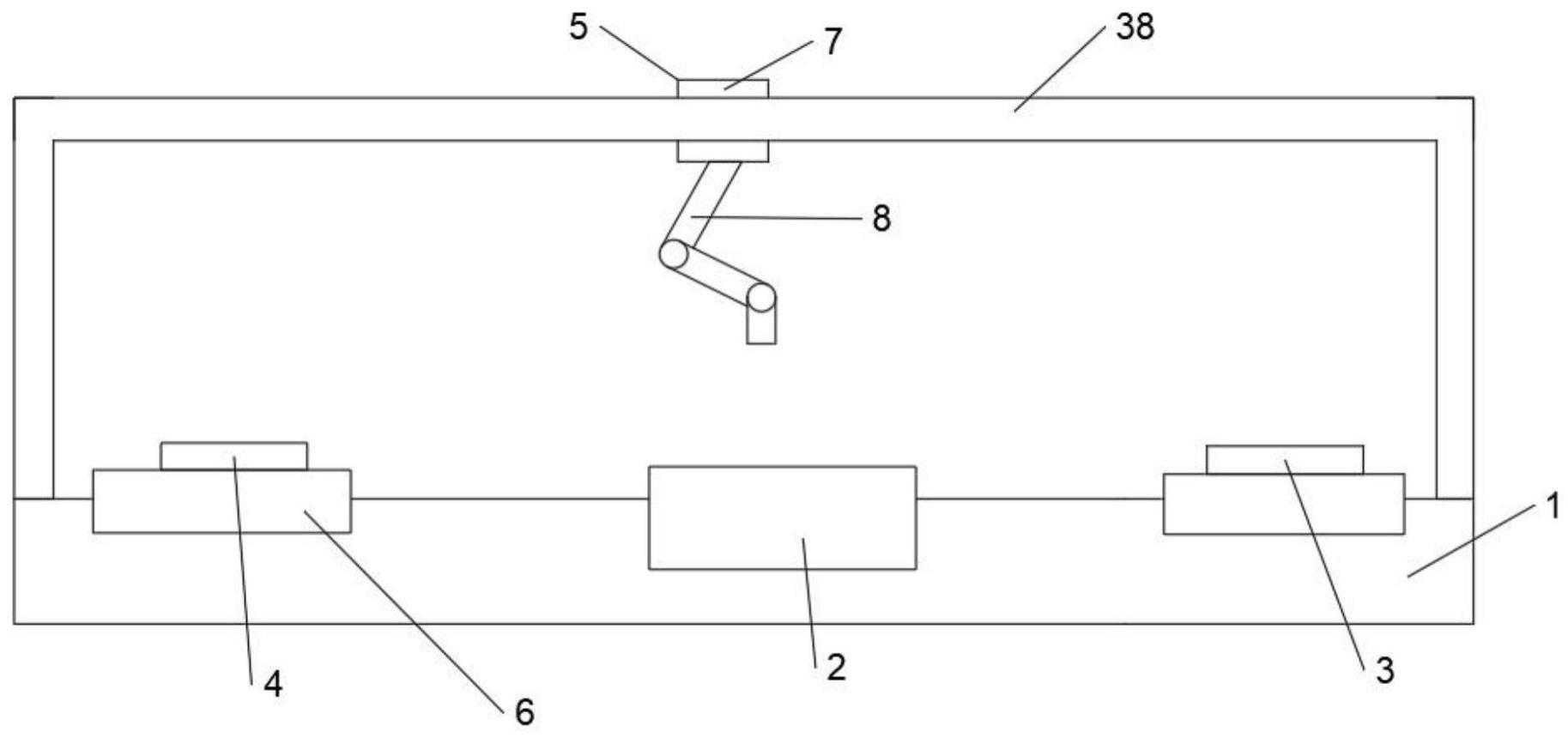
3、工作台,所述工作台顶端设有第一载具、第二载具和搬运装置,所述第一载具和第二载具之间设有偏移修复机构,所述搬运装置和偏移修复机构均与控制器电连接。
4、优选的,所述第一载具和第二载具与所述工作台之间均设有输送装置。
5、优选的,所述搬运装置包括:
6、机器人滑轨,所述机器人滑轨两端通过固定柱设有所述工作台上;
7、滑轨机器人,所述滑轨机器人设于所述机器人滑轨上,所述滑轨机器人底端设有搬运机械手,所述滑轨机器人和搬运机械手均匀所述控制器电连接。
8、优选的,所述工作台顶端设有转动槽,所述偏移修复机构转动设于所述转动槽内,所述偏移修复机构包括:所述转动槽内转动设有壳体,所述壳体顶端设有元件槽、液压泵和液压腔,所述液压泵位于所述元件槽的下方,所述液压腔位于液压泵的一侧,所述液压腔与液压泵连接;
9、第一管道,所述第一管道与分液管的中部连接,所述第一管道的两端均与修复器连接。
10、优选的,所述修复器包括:
11、滑动槽,所述滑动槽的一端与所述第一管道连接,所述滑动槽的另一端与所述元件槽连接;
12、滑动杆,所述滑动杆的一端滑动连接于所述滑动槽内,所述滑动杆的另一端与滑动板连接,所述滑动板滑动连接于所述滑动槽内。
13、优选的,所述搬运机械手为吸盘机器人。
14、优选的,所述输送装置为带式输送机。
15、优选的,所述壳体内还设有两个翻转装置,相邻两个所述翻转装置对称设于所述元件槽的两侧,通过翻转装置对元件进行翻转处理。
16、优选的,所述滑动杆远离滑动板的一侧设有密封圈,所述密封圈滑动连接于所述滑动槽内
17、优选的,所述滑动板由玻璃制成。
18、相比现有技术,本发明至少包括以下有益效果:
19、本发明所述的一种实现不同尺寸规格元件精准搬运的偏移修复机构通过设有的偏移修复机构在元件搬运过程中对偏移进行修复,避免了元件在进行载具切换过程中需要人工进行切换。
20、本发明所述的是一种实现不同尺寸规格元件精准搬运的偏移修复机构,本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
技术特征:
1.一种实现不同尺寸规格元件精准搬运的偏移修复机构,其特征在于,包括:
2.根据权利要求1所述的一种实现不同尺寸规格元件精准搬运的偏移修复机构,其特征在于,
3.根据权利要求1所述的一种实现不同尺寸规格元件精准搬运的偏移修复机构,其特征在于,
4.根据权利要求1所述的一种实现不同尺寸规格元件精准搬运的偏移修复机构,其特征在于,
5.根据权利要求4所述的一种实现不同尺寸规格元件精准搬运的偏移修复机构,其特征在于,
6.根据权利要求3所述的一种实现不同尺寸规格元件精准搬运的偏移修复机构,其特征在于,
7.根据权利要求2所述的一种实现不同尺寸规格元件精准搬运的偏移修复机构,其特征在于,
8.根据权利要求7所述的一种实现不同尺寸规格元件精准搬运的偏移修复机构,其特征在于,
9.根据权利要求5所述的一种实现不同尺寸规格元件精准搬运的偏移修复机构,其特征在于,
10.根据权利要求1所述的一种实现不同尺寸规格元件精准搬运的偏移修复机构,其特征在于,
技术总结
本发明公开了一种实现不同尺寸规格元件精准搬运的偏移修复机构,包括:工作台,所述工作台顶端设有第一载具、第二载具和搬运装置,所述第一载具和第二载具之间设有偏移修复机构,所述搬运装置和偏移修复机构均与控制器电连接;通过设有的偏移修复机构在元件搬运过程中对偏移进行修复,避免了元件在进行载具切换过程中需要人工进行切换。
技术研发人员:边锡,陈甲成,吴超,杨亚东
受保护的技术使用者:智迪机器人技术(盐城)有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!