一种基于激光雷达的塔式起重机群防碰撞系统的制作方法
本发明属于塔式起重机群防碰撞监测领域,尤其涉及一种基于激光雷达的塔式起重机群防碰撞系统。
背景技术:
1、塔式起重机(tower crane)简称塔机,亦称塔吊,起源于西欧。塔式起重机作业空间大,主要用于房屋建筑施工中物料的垂直和水平输送及建筑构件的安装。由金属结构、工作机构和电气系统三部分组成。金属结构包括塔身、动臂和底座等。工作机构有起升、变幅、回转和行走四部分。电气系统包括电动机、控制器、配电柜、连接线路、信号及照明装置等。在高密度的塔机群作业过程中,塔机与塔机、塔机与建筑物的碰撞时有发生,碰撞事故的发生带来的是人员伤亡和财产损失,所以开发一种塔机群智能防碰撞系统是至关重要的,目前我国的塔机防碰撞系统功能相对单一,且误报警的可能性较大,往往会影响施工的正常进行。
技术实现思路
1、发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供一种基于激光雷达的塔式起重机群防碰撞系统,能够有效避免塔式起重机之间、塔式起重机与周围障碍物之间的碰撞,灵活可靠。
2、本发明系统包括数据采集装置、通讯模块和云端服务器;
3、所述数据采集装置用于采集塔式起重机群信息,并通过通讯模块将塔式起重机群信息上传到云端服务器,云端服务器将塔式起重机群信息进行综合处理,并将处理结果返回到各塔式起重机。
4、所述数据采集装置包括回转角度传感器、小车变幅传感器、高度传感器,激光雷达,回转角度传感器、小车变幅传感器、高度传感器,激光雷达分别用于获取塔机当前回转角、变幅小车位置、吊钩位置信息,相干涉塔机距离信息;其中,所述回转角度传感器安装在塔机的回转中心,所述小车变幅传感器安装在变幅电机的同轴处,所述高度传感器安装在起升电机的同轴处。
5、所述激光雷达有6个,在塔式起重机的平衡臂臂端和吊重臂臂端分别安装一个,雷达扫描的正方向沿臂架的延长线向外;在臂架上安装4个,分别在臂架的三等分点上,每个等分点安装2个,正方向垂直与臂架向外。
6、所述综合处理包括如下步骤:
7、步骤1:判断塔机之间是否存在干涉区域,当有干涉区域时,判断是否进入干涉区域;
8、步骤2:如果不进入干涉区域,继续正常工作;如果进入干涉区域,则判断是否有碰撞的可能,分两次判断:一次判断为预碰撞点判断,二次判断是雷达预警区判断。
9、步骤1中,采用如下方法判断塔机之间是否存在干涉区域:判断两塔机的吊重臂或平衡臂是否与对方的吊重臂或平衡臂有交叉区域,具体为判断塔机a吊重臂la平衡臂la,塔机b吊重臂lb平衡臂lb,以及两塔机中心距离d之间的关系:
10、la+lb<d
11、la+lb<d
12、la+lb<d
13、以上3式任意一个成立则判定存在干涉区域。
14、步骤1中,已知塔机a臂架长度ra、塔机b臂架长度rb、两塔机a、b的中心距离d、塔机a的中心坐标(xa,ya),塔机b的中心坐标(xb,yb),则:
15、
16、
17、
18、其中,φa为塔机a的臂架与两塔机a、b的中心连线的夹角,φb为塔机b与两塔机a、b的中心连线的夹角,θ为两塔机a、b的中心连线与坐标系x轴正方向的夹角。
19、则对于塔机a,干涉区域角度为[θ-φa,θ+φa];
20、对于塔机b,干涉区域角度为[180°-φb+θ,180°+φb+θ]。
21、步骤2中,所述预碰撞点判断的规则为:提前t秒进行预碰撞点判断,预相撞点为p,如果塔机a与塔机b相碰撞,则会形成一个三角形oaobp,其中,oa为塔机a的旋转中心,ob为塔机b的旋转中心,实时判断以下两式是否成立:
22、
23、
24、如果两式任一成立则说明有碰撞可能;其中θa表示塔机a臂架与两塔机中心连线的夹角,θb表示塔机b臂架与两塔机中心连线的夹角。
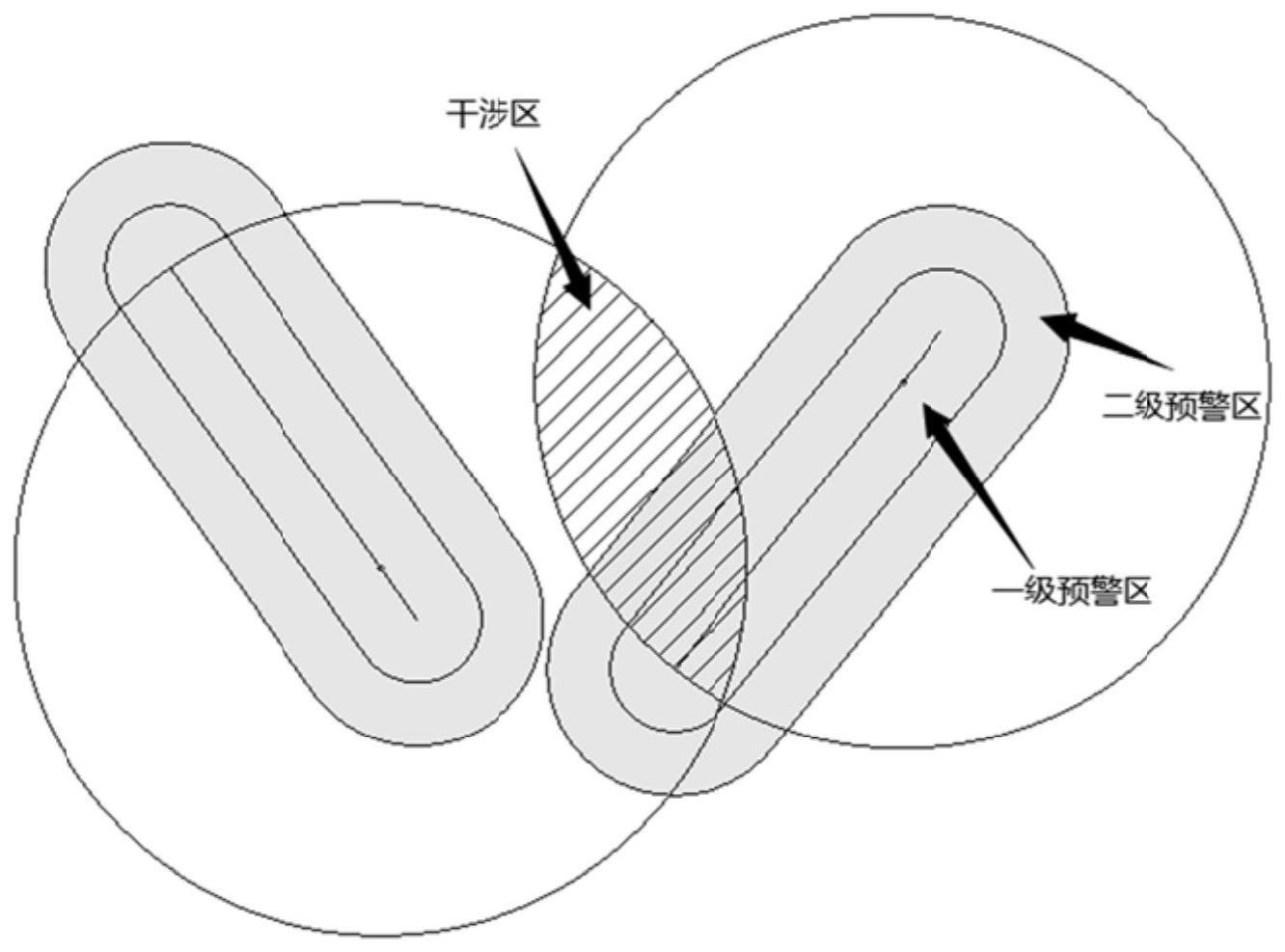
25、步骤2中,所述雷达预警区判断是指,通过在臂架上安装激光雷达,以臂架为中心向外辐射0至40米范围的激光雷达防碰撞预警区,所述防碰撞预警区包括一级预警区和二级预警区,其中,一级预警区范围为塔机从开始制动到完全停车行驶的最远距离,二级预警区为司机制动反应时间加实际制动到停车时间总和塔机所行驶的最远距离,实时主动探测有碰撞可能的障碍物,障碍物包括相干涉塔机、固定建筑物,电线杆,电线等影响塔机行驶的阻挡物。
26、步骤2中,防碰撞预警区的设定规则为:根据不同档位从刹车到停稳所走过的角度考虑,所述系统在高档位时,塔机从制动到完全停车所行驶的距离较远,在低档位时,塔机从制动到完全停车所行驶的距离较近,所以高档位的防碰撞预警区范围大于低档位。例如系统在5挡时,预警区范围是30米,4挡时为25米,3挡时为20米,2挡时为15米,1挡时为10米。
27、步骤2中,进行完预碰撞点判断和雷达预警区判断后,判断是否有碰撞预警,如果没有,则正常运行;如果有,则继续判断是否同时预警,同时预警是指一次判断和二次判断均判断有碰撞可能,如果同时预警,则进行一级预警;如果一次判断和二次判断只有单个判断有碰撞可能,则进行二级预警,二级预警时,进行声光预警;一级预警时,进行时间最短算法,并在进入一级预警区时进行平稳停车。
28、所述时间最短算法指当判断有碰撞可能时,系统判断两塔机驶离干涉区消耗的时间,提醒两塔机中行驶时间短的塔机继续驶离干涉区,提醒两塔机中行驶时间长的塔机停机等待。例如塔机a驶离干涉区消耗时间为2秒,塔机b驶离干涉区时间为2.5秒,则提醒塔机a继续驶离干涉区,提醒塔机b停车等待。
29、有益效果:本发明使用激光雷达预警区预警和预碰撞点预警双重判断的方法,其中,激光雷达预警区预警设置两级预警区,根据不同的预警区采用不同的预警等级,给塔机司机充分的时间进行防碰撞操作。双重判断的防碰撞方法能够有效避免塔机防碰撞系统漏报和误报的可能,不仅实现了塔机与塔机之间的防碰撞,同时实现了塔机与周围环境的防碰撞。
技术特征:
1.一种基于激光雷达的塔式起重机群防碰撞系统,其特征在于,包括数据采集装置、通讯模块和云端服务器;
2.如权利要求1所述的系统,其特征在于,所述数据采集装置包括回转角度传感器、小车变幅传感器、高度传感器,激光雷达,回转角度传感器、小车变幅传感器、高度传感器,激光雷达分别用于获取塔机当前回转角、变幅小车位置、吊钩位置信息,相干涉塔机距离信息;其中,所述回转角度传感器安装在塔机的回转中心,所述小车变幅传感器安装在变幅电机的同轴处,所述高度传感器安装在起升电机的同轴处。
3.如权利要求2所述的系统,其特征在于,所述激光雷达有6个,在塔式起重机的平衡臂臂端和吊重臂臂端分别安装一个,雷达扫描的正方向沿臂架的延长线向外;在臂架上安装4个,分别在臂架的三等分点上,每个等分点安装2个,正方向垂直与臂架向外。
4.如权利要求3所述的系统,其特征在于,所述综合处理包括如下步骤:
5.如权利要求4所述的系统,其特征在于,步骤1中,采用如下方法判断塔机之间是否存在干涉区域:判断两塔机的吊重臂或平衡臂是否与对方的吊重臂或平衡臂有交叉区域,具体为判断塔机a吊重臂la平衡臂la,塔机b吊重臂lb平衡臂lb,以及两塔机中心距离d之间的关系:
6.如权利要求5所述的系统,其特征在于,步骤1中,已知塔机a臂架长度ra、塔机b臂架长度rb、两塔机a、b的中心距离d、塔机a的中心坐标(xa,ya),塔机b的中心坐标(xb,yb),则:
7.如权利要求6所述的系统,其特征在于,步骤2中,所述预碰撞点判断的规则为:提前t秒进行预碰撞点判断,预相撞点为p,如果塔机a与塔机b相碰撞,则会形成一个三角形oaobp,其中,oa为塔机a的旋转中心,ob为塔机b的旋转中心,实时判断以下两式是否成立:
8.如权利要求7所述的系统,其特征在于,步骤2中,所述雷达预警区判断是指,通过在臂架上安装激光雷达,以臂架为中心向外辐射一定范围的激光雷达防碰撞预警区,所述防碰撞预警区包括一级预警区和二级预警区,其中,一级预警区范围为塔机从开始制动到完全停车行驶的最远距离,二级预警区为司机制动反应时间加实际制动到停车时间总和塔机所行驶的最远距离,实时主动探测有碰撞可能的障碍物。
9.如权利要求8所述的系统,其特征在于,步骤2中,防碰撞预警区的设定规则为:根据不同档位从刹车到停稳所走过的角度考虑,所述系统在高档位时,塔机从制动到完全停车所行驶的距离较远,在低档位时,塔机从制动到完全停车所行驶的距离较近,所以高档位的防碰撞预警区范围大于低档位。
10.如权利要求9所述的系统,其特征在于,步骤2中,进行完预碰撞点判断和雷达预警区判断后,判断是否有碰撞预警,如果没有,则正常运行;如果有,则继续判断是否同时预警,同时预警是指一次判断和二次判断均判断有碰撞可能,如果同时预警,则进行一级预警;如果一次判断和二次判断只有单个判断有碰撞可能,则进行二级预警,二级预警时,进行声光预警;一级预警时,进行时间最短算法,并在进入一级预警区时进行平稳停车;
技术总结
本发明提供了一种基于激光雷达的塔式起重机群防碰撞系统,包括若干传感器、工控机、无线通讯模块、云服务器、激光雷达。激光雷达安装在塔式起重机起重臂上,利用激光雷达在塔机周围形成一级预警区和二级预警区。本发明采用防碰撞逻辑算法一次判断和激光雷达预警区二次判断逻辑,通过二次判断的双重判断算法,极大提高防碰撞判断的准确性。判断碰撞步骤分两步,分别为防碰撞算法判断和雷达预警区判断,当两次判断只有单个判断有碰撞可能时,进行二级预警;当两次判断均判断有碰撞可能时,进行一级预警,并在进入一级雷达预警区时,多段速分级降速平稳停车。
技术研发人员:胡永坤,殷晨波,乔文华,孙兴旺,洪耀聪,黄文武,张标
受保护的技术使用者:南京安之道智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!