一种基于移动机器人的柔性越库作业方法与流程
本发明涉及仓储物流,尤其是涉及一种基于移动机器人的柔性越库作业方法。
背景技术:
1、随着零售业、社区团购及生鲜冷链的快速发展,且竞争日趋激烈,库存及成本管控变得愈发重要。而越库作为一种新型的供应配送方式,可以达到降低库存成本且快速配送的目的,已成为配送中心设计供应配送方式的重要选项。
2、越库(cross docking)是指优先获得客户订单或预测订单后,货物从不同的供应商运往配送中心,在配送中心进行收货、分拣、包装、出库的操作,然后直接运往不同的客户,具有短暂停留、不做库存、快速拣配的特点,可大幅降低配送中心的运营成本。
3、现有技术a:传统人工越库方案,整批次越库前,为每个订单规划一个暂存区,人工根据操作终端提示用地牛叉车将货物搬至对应订单暂存区并将货物放至容器内,对应订单完成播种分拣后,人员进行包装装车发货。
4、现有技术b:自动化分拣线越库方案,整批次越库前,将每个订单与分拣机出口进行信息绑定,人工将货物搬至分拣线入口投放,分拣线根据条码读取信息将物料运送至对应格口,完成订单集货,人员进行包装装车发货。
5、现有技术c:agv货到人越库方案,整批次物料到货后全部进行入库操作,首先,agv调度系统分配订单至人工拣选工作站,订单与工作站进行信息绑定,其次,agv调度系统将拣选工作站分配订单对应的物料,通过agv将命中货架逐个有序搬运至拣选工作站,进行人工拣选完成订单集货,人员进行包装装车发货。
6、上述各类现有技术的主要缺点是:
7、a:作业动线较混乱、人工行走距离长、人工分拨差错多、越库作业效率低周期长;
8、b:刚性设备柔性低,场地占用面积大、投线码托搬运多、不适合多品类、多规格、多订单、多客户的越库场景。
9、c:工作站全部品类人工拣选效率低,拣选集货后人工搬运效率低,整批次物料到货后进行分拣,不适合批量物料、分批到货物料的越库操作;
技术实现思路
1、本发明的目的在于提供一种基于移动机器人的柔性越库作业方法,能够针对多品类、多规格、多订单、多客户的复杂越库场景,提高越库效率、速度、质量、柔性。
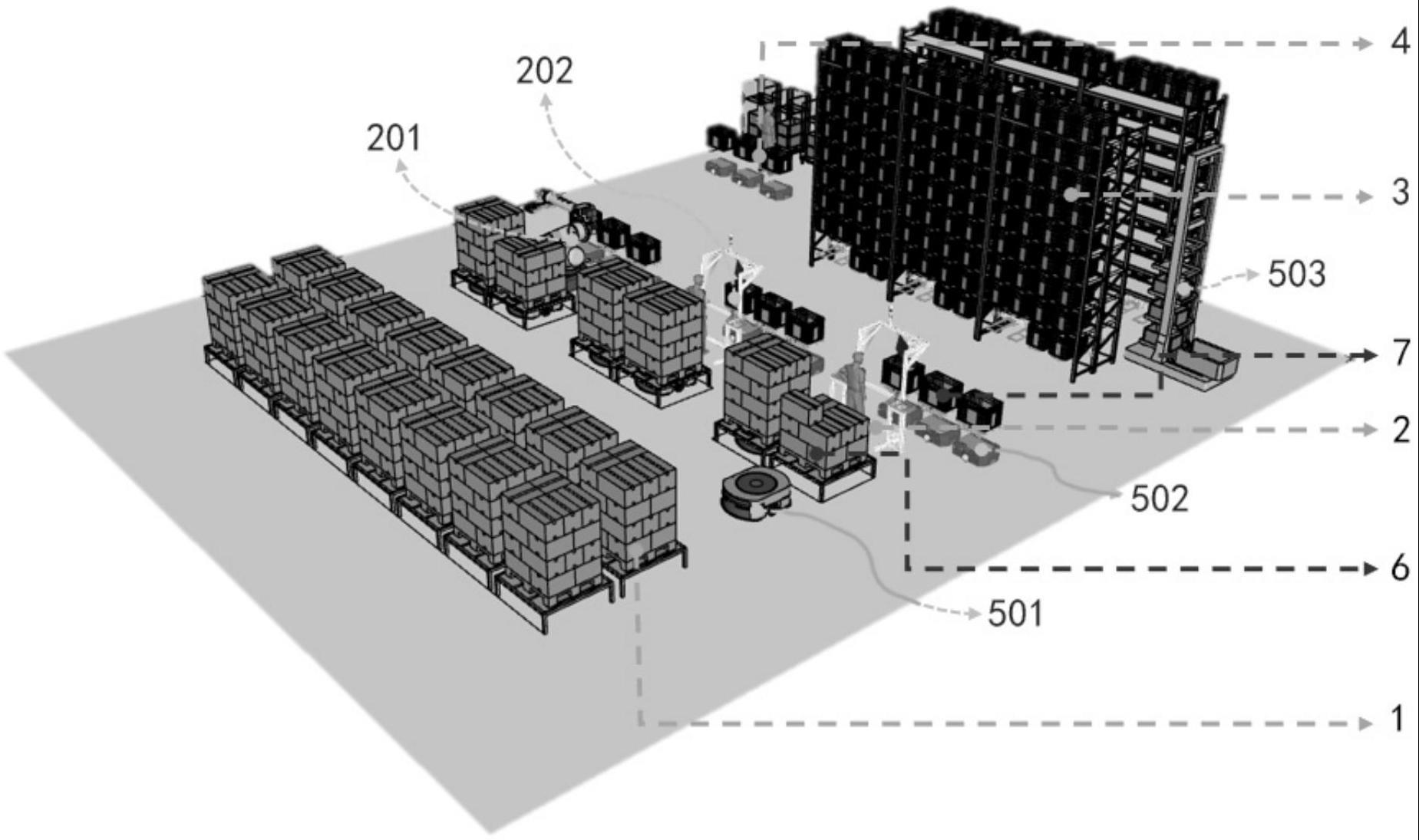
2、本发明提供一种基于移动机器人的柔性越库作业方法,包括如下步骤:s1,建立配送中心,包括仓储调度系统、入库暂存区、拣选工作站、订单暂存区和订单集货区;s2,入库暂存:收货后将托盘放置到载具上,扫描物料信息和载具编码并进行绑定,仓储调度系统调度移动机器人搬运存货载具至入库暂存区;s3,调度搬运:仓储调度系统根据订单bom计算订单物料体积,自动选择订单物料存货料箱数量,调度多种类型多台移动机器人搬运入库暂存区订单命中物料和订单暂存区订单命中载具至对应拣选工作站;s4,拣选操作:仓储调度系统根据已搬运到拣选工作站的多类型订单货物的信息进行柔性拣选;s5,订单搬运:仓储调度系统调度移动机器人将拣选完成的载具搬运至入库暂存区,将拣选完成的订单料箱搬运至订单暂存区;s6,集货搬运:仓储调度系统根据上层业务系统下发的装车单顺序信息,调度移动机器人搬运装车单对应的订单料箱至指定的订单集货区,再进行装车发运。
3、进一步地,s1中,入库暂存区包括对应于不同类型移动机器人工作的不同类型货架和不同类型载具,以及用于扫描信息的终端设备。
4、进一步地,s2中,通过终端设备扫描物料信息和载具编码并绑定,仓储调度系统调度对应该类型载具的移动机器人将存货载具搬运至入库暂存区的对应类型货架。
5、进一步地,拣选工作站包括:人工拣选工作站,包括可实时接收订单拣选信息的提示装置;自动拣选工作站,包括可根据sku及订单信息自动拣选的机械臂。
6、进一步地,s3中,仓储调度系统根据订单sku选择对应人工拣选工作站或自动拣选工作站。
7、进一步地,s4中,仓储调度系统根据订单sku选择不同对应类型的机械臂自动拣选,或将拣选信息传递至可视提示装置人工拣选。
8、进一步地,仓储调度系统根据搬运到指定拣选工作站的订单命中物料、订单命中载具的信息判断订单sku的形状、大小属性,调度不规则物料使用人工拣选,调度规则物料使用机械臂拣选。
9、进一步地,移动机器人包括但不限于抱箱拣选agv、单箱搬运agv和kiva。
10、本发明的技术方案通过布置多类型载具及货架、多类型移动机器人、多类型柔性拣选工作站,再由仓储调度系统调度多类型移动机器人实现“多类型订单+多类型货物”到多类型拣选站的柔性搬运、实现多品类sku的柔性拣选、实现多订单客户的快速集货发运。综合提升越库的效率、速度、质量、柔性。
技术特征:
1.一种基于移动机器人的柔性越库作业方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于移动机器人的柔性越库作业方法,其特征在于,s1中,入库暂存区包括对应于不同类型移动机器人工作的不同类型货架和不同类型载具,以及用于扫描信息的终端设备。
3.根据权利要求2所述的基于移动机器人的柔性越库作业方法,其特征在于,s2中,通过终端设备扫描物料信息和载具编码并绑定,仓储调度系统调度对应该类型载具的移动机器人将存货载具搬运至入库暂存区的对应类型货架。
4.根据权利要求1所述的基于移动机器人的柔性越库作业方法,其特征在于,拣选工作站包括:
5.根据权利要求4所述的基于移动机器人的柔性越库作业方法,其特征在于,s3中,仓储调度系统根据订单sku选择对应人工拣选工作站或自动拣选工作站。
6.根据权利要求5所述的基于移动机器人的柔性越库作业方法,其特征在于,s4中,仓储调度系统根据订单sku选择不同对应类型的机械臂自动拣选,或将拣选信息传递至可视提示装置人工拣选。
7.根据权利要求6所述的基于移动机器人的柔性越库作业方法,其特征在于,仓储调度系统根据搬运到指定拣选工作站的订单命中物料、订单命中载具的信息判断订单sku的形状、大小属性,调度不规则物料使用人工拣选,调度规则物料使用机械臂拣选。
8.根据权利要求1所述的基于移动机器人的柔性越库作业方法,其特征在于,移动机器人包括但不限于抱箱拣选agv、单箱搬运agv和kiva。
技术总结
本发明提供了一种基于移动机器人的柔性越库作业方法,涉及仓储物流技术领域,包括步骤:S1,建立配送中心,包括仓储调度系统、入库暂存区、拣选工作站、订单暂存区和订单集货区;S2入库暂存;S3调度搬运;S4拣选操作;S5订单搬运;S6集货搬运。本发明通过布置多类型载具及货架、多类型移动机器人、多类型柔性拣选工作站,再由仓储调度系统调度多类型移动机器人实现“多类型订单+多类型货物”到多类型拣选站的柔性搬运、实现多品类SKU的柔性拣选、实现多订单客户的快速集货发运。综合提升越库的效率、速度、质量、柔性。
技术研发人员:武靖,王翰林,朱礼君,王会珍
受保护的技术使用者:杭州壹悟科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!