巡检机器人及管带式输送系统的制作方法
本申请涉及带式输送,特别是涉及一种巡检机器人及管带式输送系统。
背景技术:
1、管带式输送机的运行状态监控常采用点检、巡检两种传统的现场人工维护方式,巡检人员通过现场观察来获得输送机工作时的各种状态,如托辊的异常噪音、输送带过高温度等。随着管带式输送机向长距离输送方向发展,这种人工维护方式的成本增大,也无法及时发现设备运行中的故障。
2、随着智能巡检技术的发展,现在也有采用巡检机器人对管带式输送机的运行状态进行监控,现有的巡检机器人多为轨道悬挂式机器人,其行走空间会占据管带机两侧的人工走道,影响检修人员的正常作业,同时受轨道高度的限制,进入管带机转运站内,巡检机器人无法沿原有高度运行,从而无法对管带机整套线路进行完整的巡检。
技术实现思路
1、本申请的目的是提供一种巡检机器人及管带式输送系统,该巡检机器人用于管带式输送机,通过结构优化,整体体积相对较小,安装位置较为灵活,不占用检修人员的走道空间,并能实现对管带机整套线路的完整巡检。
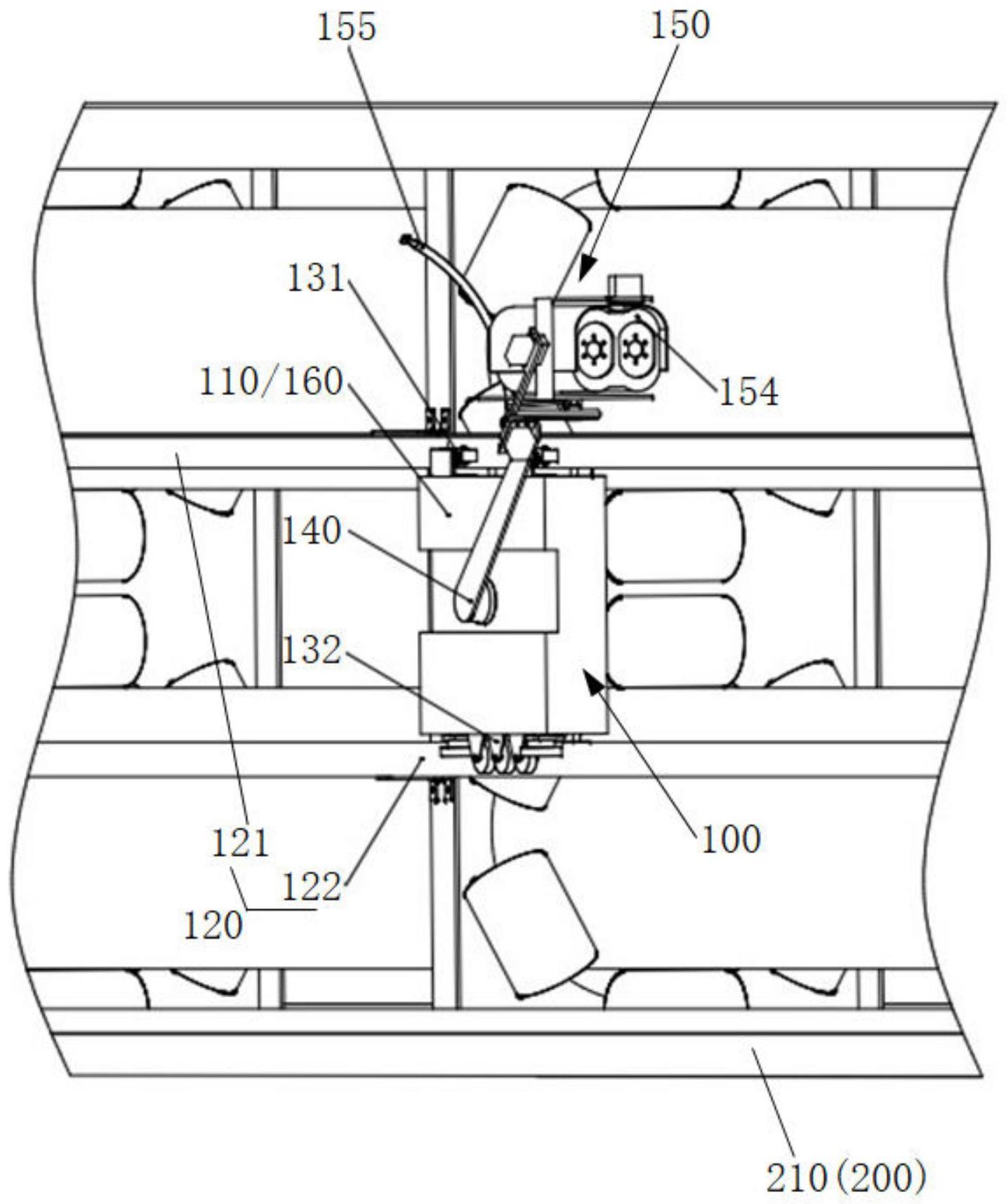
2、为解决上述技术问题,本申请实施例提供一种巡检机器人,用于管带式输送机,包括机体、导轨机构、行走机构、摆臂机构和检测机构;
3、所述导轨机构沿所述管带式输送机的传送方向延伸;
4、所述行走机构用于带动所述机体沿所述导轨机构行走;
5、所述摆臂机构与所述机体可转动连接,所述检测机构可滑动地安装在所述摆臂机构上;
6、所述摆臂机构能够带动所述检测机构在第一平面内转动,所述检测机构相对所述摆臂机构的滑动方向垂直于所述第一平面;所述第一平面与所述管带式输送机的桁架侧面平行。
7、本申请提供的巡检机器人用于管带式输送机,可对管带式输送机的运行状态进行监控。该巡检机器人的导轨机构沿着管带式输送机的传送方向延伸,通过行走机构带动机体沿导轨机构行走,机体可转动连接有摆臂机构,摆臂机构上安装有可滑动地检测机构,摆动机构能够带动检测机构在与管带式输送机的桁架侧面平行的平面内转动,检测机构可相对摆臂机构沿垂直于第一平面的方向滑动;这样,通过摆臂机构的转动和检测机构的滑动,可以改变检测机构的活动范围,扩大检测机构的检测范围,在巡检空间较为狭小时,可通过摆臂机构的转动带动检测机构处在相对较低的高度,并通过检测机构相对摆臂机构的滑动来缩小巡检机器人的整体体积,避免巡检机器人占用过多的空间,使得巡检机器人能够沿管带式输送机的整套线路进行完整的巡检,并且安装位置更加灵活。
8、如上所述的巡检机器人,所述检测机构包括安装架、第一执行部件、第二执行部件和图像采集器;
9、所述第一执行部件用于驱动所述安装架绕第一轴转动;
10、所述第二执行部件安装在所述安装架上,并用于驱动所述图像采集器绕第二轴转动;
11、所述第一轴与所述检测机构相对所述摆臂机构的滑动方向平行;
12、所述第二轴与所述第一轴垂直。
13、如上所述的巡检机器人,所述检测机构还包括安装在所述安装架上的探头组件,所述探头组件包括第三执行部件和探头,所述第三执行部件用于驱动所述探头在第二平面内转动,以实现对所述管带式输送机的各托辊的检测;所述第二平面与所述管带式输送机的桁架的横截面平行;所述探头用于测量所述管带式输送机的托辊和输送带的工作参数信息。
14、如上所述的巡检机器人,所述探头组件还包括第一动力部件和套筒组件,所述套筒组件包括至少两个套筒,各所述套筒依次嵌套,相邻的两个所述套筒中,一者可相对另一种伸缩,所述第一动力部件用于驱动所述套筒组件伸缩;所述套筒组件的一端与所述第三执行部件连接,另一端安装有所述探头。
15、如上所述的巡检机器人,所述套筒为弧形套筒。
16、如上所述的巡检机器人,所述探头上集成有无线通信模块。
17、如上所述的巡检机器人,所述摆臂机构上安装有第二动力部件,所述第二动力部件的输出端连接有传动齿轮,所述检测机构连接有滑轨,所述滑轨具有与所述传动齿轮啮合的齿部,所述齿部沿所述检测机构的滑动方向延伸,所述第二动力部件用于驱动所述传动齿轮转动。
18、如上所述的巡检机器人,所述摆臂机构包括摆臂,所述摆臂包括第一臂部和第二臂部,所述第一臂部的一端与所述机体可转动连接,所述第一臂部的另一端固接所述第二臂部,所述第二臂部与所述第一臂部相垂直设置;所述检测机构可滑动地安装在所述第二臂部远离所述第一臂部的一端。
19、如上所述的巡检机器人,所述第一臂部可转动地插入所述机体内,所述第一臂部伸入所述机体内的一端设有第一齿轮,所述机体内设有第三动力部件,所述第三动力部件的输出端连接有第二齿轮,所述第三动力部件用于驱动所述第二齿轮转动,所述第二齿轮与所述第一齿轮啮合配合。
20、如上所述的巡检机器人,所述导轨机构包括平行设置的上导轨和下导轨;所述行走机构包括上行走组件和下行走组件,所述上行走组件和所述下行走组件通过支架连接;所述下行走组件包括驱动组件,所述驱动组件用于驱动所述下行走组件沿所述下导轨行走。
21、如上所述的巡检机器人,所述上行走组件包括上导向轮和调节组件,所述上导向轮能够绕其轴线转动,以沿所述上导轨行走,所述调节组件用于调节所述上导向轮与所述上导轨的压紧程度。
22、如上所述的巡检机器人,所述调节组件包括调节轮、固定座和第一弹性件,所述固定座与所述支架固定连接,所述第一弹性件设于所述固定座和所述调节轮之间,所述调节轮与所述上导轨接触且滚动配合。
23、如上所述的巡检机器人,所述驱动组件包括驱动部件和驱动轮,所述驱动部件的输出端与所述驱动轮连接,所述驱动部件用于驱动所述驱动轮转动;所述驱动组件与所述支架之间设有第二弹性件,以将所述驱动组件压向所述下导轨,所述驱动轮与所述下导轨压紧接触。
24、如上所述的巡检机器人,所述下导轨为l形导轨,所述驱动轮与所述l形导轨的竖直轨面配合;所述驱动部件位于所述驱动轮的上方。
25、如上所述的巡检机器人,所述下行走组件还包括下导向轮,所述下导向轮能够绕其轴线转动,所述下导向轮与所述l形导轨的竖直轨面配合。
26、如上所述的巡检机器人,所述下行走组件还包括承重轮,所述承重轮能够绕其轴线转动,并与所述l形导轨的水平轨面接触。
27、本申请实施例还提供一种管带式输送系统,包括管带式输送机和位于所述管带式输送机两侧的栏杆,所述栏杆与所述管带式输送机的桁架之间形成行走通道;其特征在于,还包括上述任一项所述的巡检机器人,所述巡检机器人用于监控所述管带式输送机的运行状态。
28、由于上述巡检机器人具有上述技术效果,所以包括该巡检机器人的管带式输送系统也具有相应的技术效果,此处不再重复论述。
29、如上所述的管带式输送系统,所述巡检机器人导轨机构安装于所述桁架的外侧或者所述栏杆的内侧。
技术特征:
1.巡检机器人,用于管带式输送机,其特征在于,包括机体、导轨机构、行走机构、摆臂机构和检测机构;
2.根据权利要求1所述的巡检机器人,其特征在于,所述检测机构包括安装架、第一执行部件、第二执行部件和图像采集器;
3.根据权利要求2所述的巡检机器人,其特征在于,所述检测机构还包括安装在所述安装架上的探头组件,所述探头组件包括第三执行部件和探头,所述第三执行部件用于驱动所述探头在第二平面内转动,以实现对所述管带式输送机的各托辊的检测;所述第二平面与所述管带式输送机的桁架的横截面平行;所述探头用于测量所述管带式输送机的托辊和输送带的工作参数信息。
4.根据权利要求3所述的巡检机器人,其特征在于,所述探头组件还包括第一动力部件和套筒组件,所述套筒组件包括至少两个套筒,各所述套筒依次嵌套,相邻的两个所述套筒中,一者可相对另一种伸缩,所述第一动力部件用于驱动所述套筒组件伸缩;所述套筒组件的一端与所述第三执行部件连接,另一端安装有所述探头。
5.根据权利要求4所述的巡检机器人,其特征在于,所述套筒为弧形套筒。
6.根据权利要求3所述的巡检机器人,其特征在于,所述探头上集成有无线通信模块。
7.根据权利要求1所述的巡检机器人,其特征在于,所述摆臂机构上安装有第二动力部件,所述第二动力部件的输出端连接有传动齿轮,所述检测机构连接有滑轨,所述滑轨具有与所述传动齿轮啮合的齿部,所述齿部沿所述检测机构的滑动方向延伸,所述第二动力部件用于驱动所述传动齿轮转动。
8.根据权利要求1所述的巡检机器人,其特征在于,所述摆臂机构包括摆臂,所述摆臂包括第一臂部和第二臂部,所述第一臂部的一端与所述机体可转动连接,所述第一臂部的另一端固接所述第二臂部,所述第二臂部与所述第一臂部相垂直设置;所述检测机构可滑动地安装在所述第二臂部远离所述第一臂部的一端。
9.根据权利要求8所述的巡检机器人,其特征在于,所述第一臂部可转动地插入所述机体内,所述第一臂部伸入所述机体内的一端设有第一齿轮,所述机体内设有第三动力部件,所述第三动力部件的输出端连接有第二齿轮,所述第三动力部件用于驱动所述第二齿轮转动,所述第二齿轮与所述第一齿轮啮合配合。
10.根据权利要求1-9任一项所述的巡检机器人,其特征在于,所述导轨机构包括平行设置的上导轨和下导轨;所述行走机构包括上行走组件和下行走组件,所述上行走组件和所述下行走组件通过支架连接;所述下行走组件包括驱动组件,所述驱动组件用于驱动所述下行走组件沿所述下导轨行走。
11.根据权利要求10所述的巡检机器人,其特征在于,所述上行走组件包括上导向轮和调节组件,所述上导向轮能够绕其轴线转动,以沿所述上导轨行走,所述调节组件用于调节所述上导向轮与所述上导轨的压紧程度。
12.根据权利要求11所述的巡检机器人,其特征在于,所述调节组件包括调节轮、固定座和第一弹性件,所述固定座与所述支架固定连接,所述第一弹性件设于所述固定座和所述调节轮之间,所述调节轮与所述上导轨接触且滚动配合。
13.根据权利要求10所述的巡检机器人,其特征在于,所述驱动组件包括驱动部件和驱动轮,所述驱动部件的输出端与所述驱动轮连接,所述驱动部件用于驱动所述驱动轮转动;所述驱动组件与所述支架之间设有第二弹性件,以将所述驱动组件压向所述下导轨,所述驱动轮与所述下导轨压紧接触。
14.根据权利要求13所述的巡检机器人,其特征在于,所述下导轨为l形导轨,所述驱动轮与所述l形导轨的竖直轨面配合;所述驱动部件位于所述驱动轮的上方。
15.根据权利要求14所述的巡检机器人,其特征在于,所述下行走组件还包括下导向轮,所述下导向轮能够绕其轴线转动,所述下导向轮与所述l形导轨的竖直轨面配合。
16.根据权利要求14所述的巡检机器人,其特征在于,所述下行走组件还包括承重轮,所述承重轮能够绕其轴线转动,并与所述l形导轨的水平轨面接触。
17.管带式输送系统,包括管带式输送机和位于所述管带式输送机两侧的栏杆,所述栏杆与所述管带式输送机的桁架之间形成行走通道;其特征在于,还包括如权利要求1-16任一项所述的巡检机器人,所述巡检机器人用于监控所述管带式输送机的运行状态。
18.根据权利要求17所述的管带式输送系统,其特征在于,所述巡检机器人导轨机构安装于所述桁架的外侧或者所述栏杆的内侧。
技术总结
本申请公开了一种巡检机器人及管带式输送系统,该巡检机器人,用于管带式输送机,包括机体、导轨机构、行走机构、摆臂机构和检测机构;所述导轨机构沿所述管带式输送机的传送方向延伸;所述行走机构用于带动所述机体沿所述导轨机构行走;所述摆臂机构与所述机体可转动连接,所述检测机构可滑动地安装在所述摆臂机构上;所述摆臂机构能够带动所述检测机构在第一平面内转动,所述检测机构相对所述摆臂机构的滑动方向垂直于所述第一平面;所述第一平面与所述管带式输送机的桁架侧面平行。该巡检机器人用于管带式输送机,通过结构优化,整体体积相对较小,安装位置较为灵活,不占用检修人员的走道空间,并能实现对管带机整套线路的完整巡检。
技术研发人员:苏金辉,张玉妮,廖辉,陈鹏河,蓝武生
受保护的技术使用者:福建龙净环保股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!