一种管廊上自动爬行与搬运装置的制作方法
本发明涉及管道运输,尤其涉及一种管廊上自动爬行与搬运装置。
背景技术:
1、现有钢结构大跨度石化管廊项目中,钢结构管廊分为三层,管廊上方需按设计图纸要求放置用途不一的管道,传统的管道放置施工方式采用吊装放置,管道倒运效率较低,易出现管线表面磕碰和油漆破损的情况,并且在施工过程中很容易发生高空坠落的安全隐患,现根据项目需求及施工情况研发出了一种管廊上自动爬行与搬运装置。本发明适用于各类石化管线工程中的管线倒运工作,可以有效提高各尺寸管道倒运工作效率,有效保护了管线免受损伤、划伤,并且有效的节省了施工所需资源,简便实用,大大提高了安装效率。
技术实现思路
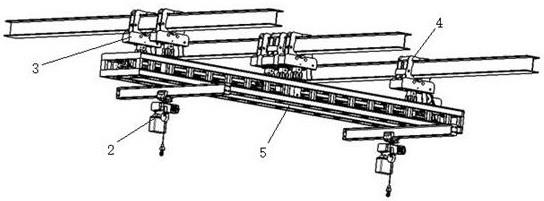
1、本发明目的在于针对现有技术的不足,提供一种管廊上自动爬行与搬运装置,包括:
2、框架,设置在管廊下方;
3、四个小夹爪,设置在框架上,与框架同步运动;
4、两个大夹爪,设置在框架上,与框架相对运动;
5、升降夹紧机构,设在小夹爪和大夹爪内,驱使小夹爪和大夹爪升降和夹紧管廊;
6、平移机构,设置在框架上,为大夹爪的横移提供动力;
7、钢管运输机构,设置在框架下方,能够顾悬挂钢管随框架同步移动。
8、优选地,所述小夹爪和大夹爪的工作原理相同,均包括夹爪本体和夹爪架,升降夹紧机构包括设置夹爪本体的扇形齿轮,通过设置在夹爪本体上的夹紧油缸驱动扇形齿轮的运动使得小夹爪和大夹爪夹紧或者松开,夹爪本体的下方还设置有上下油缸,所述上下油缸设在框架上,上下油缸活塞杆伸出或缩回的运动通过设在框架上的导向板导向。
9、优选地,所述平移机构包括设在框架两端的固定链轮和涨紧链轮,所述固定链轮和涨紧链轮通过链条连接,所述大夹爪设在位于框架的滑动座上,滑动座通过安装在滑动座底部的滚轮和链条在框架上左右移动,其中,所述固定链轮由主动链轮通过传动链驱动,主动链轮通过设在框架上的减速电机提供动力。
10、优选地,所述小夹爪和大夹爪的底部均套设在夹爪固定座内,所述上下油缸设在夹爪固定座内,所述夹爪固定座分别设在框架上以及滑动座上。
11、优选地,所述链条通过安装在框架上的第一链条涨紧器涨紧,所述传动链通过安装在框架上的第二链条涨紧器涨紧,所述减速电机固定于第二链条涨紧器上。
12、优选地,所述框架上还设有供涨紧链轮和固定链轮安装的涨紧链轮固定座和固定链轮固定座。
13、优选地,所述框架的底部设置有供钢管运输机构放置的横梁,还分别开设有小夹爪安装平面、涨紧链轮固定平面、固定链轮固定平面、减速电机固定平面,滚轮滑槽,所述滚轮滚动的设置在滚轮滑槽内。
14、优选地,所述钢管运输机构包括安装在横梁上的电动葫芦,电动葫芦的下部通过滑轮连接有用于吊挂钢管的吊钩,所述电动葫芦通过无线遥控器远程遥控。
15、与现有技术相比,本发明的有益效果为:通过管廊上的管道运输装置可将在一个固定吊点吊起的管道连续运输到60米处的位置,并通过操作手柄随时启停;每台步进电机配有一台控制器,通过控制器可对电机转速进行调节,保证开合机构速度的一致性;除了适用于常规位置的管廊之外,尤其在跨河或无法架设吊车位置处的管道运输,大大提高施工效率。
技术特征:
1.一种管廊上自动爬行与搬运装置,其特征在于;包括:
2.根据权利要求1所述的一种管廊上自动爬行与搬运装置,其特征在于,所述小夹爪和大夹爪的工作原理相同,均包括夹爪本体和夹爪架,升降夹紧机构包括设置夹爪本体的扇形齿轮,通过设置在夹爪本体上的夹紧油缸驱动扇形齿轮的运动使得小夹爪和大夹爪夹紧或者松开,夹爪本体的下方还设置有上下油缸,所述上下油缸设在框架上,上下油缸活塞杆伸出或缩回的运动通过设在框架上的导向板导向。
3.根据权利要求1所述的一种管廊上自动爬行与搬运装置,其特征在于,所述平移机构包括设在框架两端的固定链轮和涨紧链轮,所述固定链轮和涨紧链轮通过链条连接,所述大夹爪设在位于框架的滑动座上,滑动座通过安装在滑动座底部的滚轮和链条在框架上左右移动,其中,所述固定链轮由主动链轮通过传动链驱动,主动链轮通过设在框架上的减速电机提供动力。
4.根据权利要求3所述的一种管廊上自动爬行与搬运装置,其特征在于,所述小夹爪和大夹爪的底部均套设在夹爪固定座内,所述上下油缸设在夹爪固定座内,所述夹爪固定座分别设在框架上以及滑动座上。
5.根据权利要求4所述的一种管廊上自动爬行与搬运装置,其特征在于,所述链条通过安装在框架上的第一链条涨紧器涨紧,所述传动链通过安装在框架上的第二链条涨紧器涨紧,所述减速电机固定于第二链条涨紧器上。
6.根据权利要求5所述的一种管廊上自动爬行与搬运装置,其特征在于,所述框架上还设有供涨紧链轮和固定链轮安装的涨紧链轮固定座和固定链轮固定座。
7.根据权利要求6所述的一种管廊上自动爬行与搬运装置,其特征在于,所述框架的底部设置有供钢管运输机构放置的横梁,还分别开设有小夹爪安装平面、涨紧链轮固定平面、固定链轮固定平面、减速电机固定平面,滚轮滑槽,所述滚轮滚动的设置在滚轮滑槽内。
8.根据权利要求7所述的一种管廊上自动爬行与搬运装置,其特征在于,所述钢管运输机构包括安装在横梁上的电动葫芦,电动葫芦的下部通过滑轮连接有用于吊挂钢管的吊钩,所述电动葫芦通过无线遥控器远程遥控。
技术总结
本发明公开一种管廊上自动爬行与搬运装置,包括框架,设置在管廊下方;四个小夹爪,设置在框架上,与框架同步运动;两个大夹爪,设置在框架上,与框架相对运动;升降夹紧机构,设在小夹爪和大夹爪内,驱使小夹爪和大夹爪升降和夹紧管廊;平移机构,设置在框架上,为大夹爪的横移提供动力;钢管运输机构,设置在框架下方,能够顾悬挂钢管随框架同步移动,本发明可一次安装,爬行一整个管廊的长度,同时一次安置行车远距离运输。
技术研发人员:刘杰,刘长沙,刘英磊,李翊,于翰文,董巍巍,赵岩,曹梁,李道明,吴俊政
受保护的技术使用者:中建安装集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!