一种档案管理装置的制作方法
本发明涉及智能仓储,尤其涉及一种档案管理装置。
背景技术:
1、目前,随着各企业和单位中需要管理的档案数量快速增长,传统管理方式是在档案柜上贴有纸质标签,工作人员依据档案柜上的标签寻找所需的档案或档案待存放的位置,为了尽可能的存放更多档案,档案柜体一般设计较高,有时还需借助梯子进行存取档案,使用不便且增加了工作人员的工作量,面对繁杂的种类和逐渐增多的存储量,检索工作也尤为困难。目前的档案管理主要依赖档案柜和管理员来查找和存取档案,不仅操作流程繁琐、效率低下、耗费较大的人力和物力,当出现档案丢失或损坏后,档案信息也很难追溯。随着人工智能、物联网、机器人等技术的发展,出现了许多智能档案柜,可以根据用户输入的需求自动定位所需档案的位置信息,再由工作人员到达目标位置取出或存放档案,一定程度上提高了工作效率,但仍然需要工作人员的协助。随后人们在档案管理中加入机械手,借助机械手自动对档案进行存取,可现有的机械手定位不够准确,夹取档案时动作不够灵活,对应用场景和档案柜的摆放有一定的要求,所以实际应用的范围较窄,提高工作效率的效果不明显,还存在增加工作量的风险。
2、因此,需要一种更智能化、自动化和适用性较强的档案管理装置,在提高档案管理工作效率的同时,也能降低档案管理的出错率,保证档案管理的安全性。
技术实现思路
1、针对现有技术存在的上述问题,本发明提出了一种档案管理装置,根据上位机发送的控制指令自动、准确的定位到目标位置,并通过机械手抓取目标档案完成其存取操作,不仅提高了档案管理管理的工作效率,还提高了档案的安全性,采用自动化和数字化的管理方式也为档案的盘点和流转信息的溯源提供了便利。
2、具体技术方案如下:
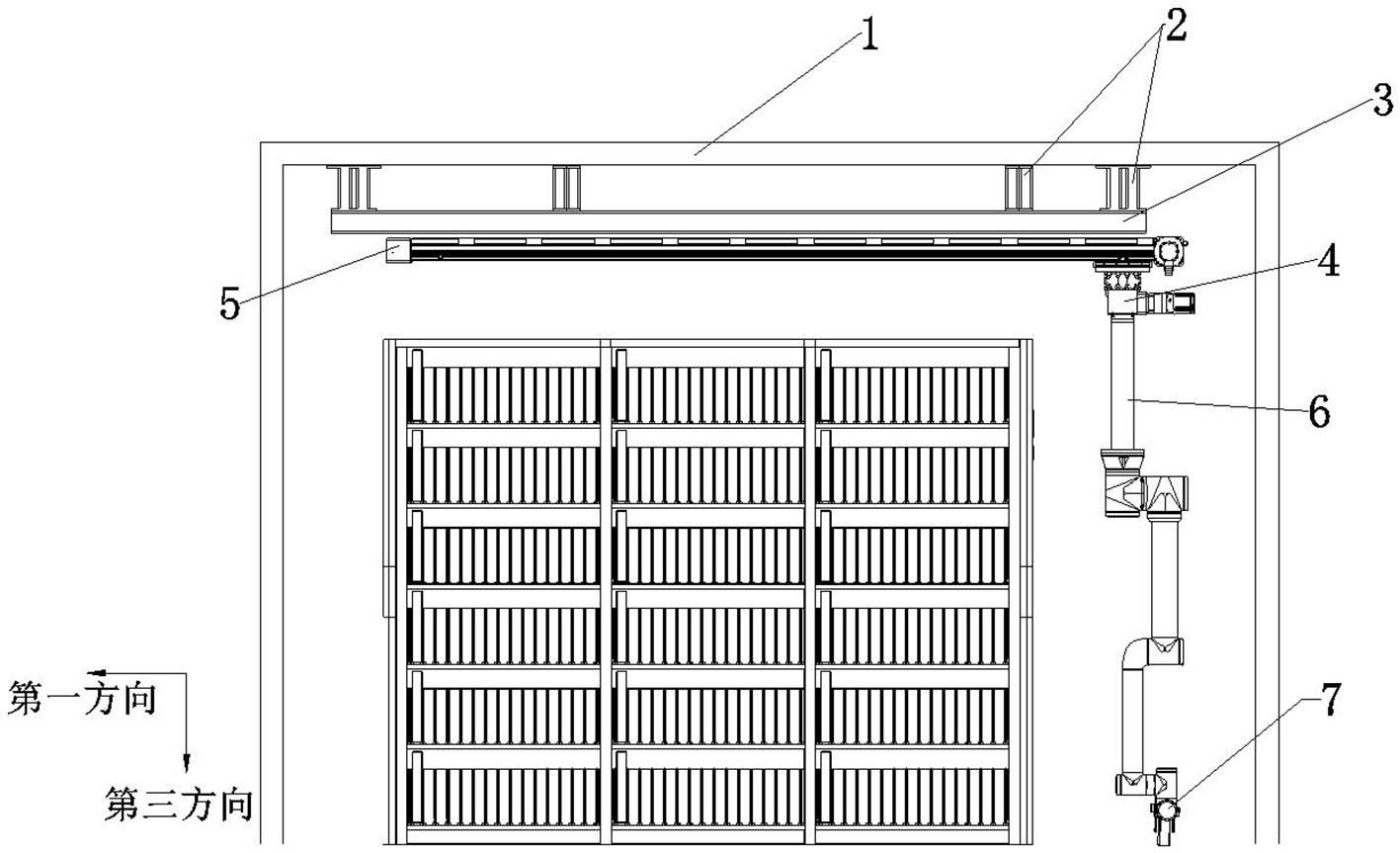
3、一种档案管理装置,包括轨道单元和抓取单元,所述抓取单元在所述轨道单元内滑动;
4、所述轨道单元包括定位梁、定轨、动轨和若干连接架;所述定位梁通过若干均匀分布的连接架固定连接在支撑面上,包括第一方向定位梁和第二方向定位梁,所述第一方向定位梁与所述第二方向定位梁垂直设置,所述第一方向与第二方向确定的平面平行于所述支撑面,所述定轨沿第一方向定位梁设置,所述动轨沿第二方向定位梁设置,所述动轨安装于所述定轨的下方,向第一方向滑动;
5、所述抓取单元用于定位和抓取目标物体,包括机械手悬臂和机械手手夹,所述机械手手夹通过所述机械手悬臂与所述动轨连接,沿第三方向设置且向所述第二方向滑动,所述第三方向垂直于所述第一方向和所述第二方向确定的平面;所述机械手手夹设有摄像装置和rfid识别装置。
6、进一步地,还包括第一电机驱动单元,用于驱动所述动轨在所述定轨上滑动。
7、进一步地,所述定轨和所述动轨均设有若干感应器;
8、其中,所述定轨靠近所述第一电机驱动单元的一端设有第一原点感应器,所述定轨的另一端设有极限位置感应器;
9、所述动轨在靠近所述第一电机驱动单元的一端设有第二原点感应器和原点保护感应器。
10、进一步地,所述轨道单元还包括同步带和滑块机构,所述滑块机构分别安装于所述定轨和所述动轨上,所述同步带安装于所述定轨和所述动轨的外侧;所述滑块机构为双滑块机构,所述同步带为齿面加布基同步带。
11、进一步地,所述机械手悬臂与所述动轨上的滑块机构固定连接,所述机械手悬臂为六轴机械臂,包括伸缩机构、旋转机构和第二电机驱动单元;所述伸缩机构的一端与所述滑块机构固定连接,所述伸缩机构的另一端与所述旋转机构连接;所述伸缩机构用于所述第三方向伸缩,所述伸缩机构伸长时,可沿所述第一方向和所述第二方向运行;所述旋转机构下方连接所述机械手手夹,可在所述第一方向与所述第二方向确定的平面上旋转;所述第二电机驱动单元用于驱动所述伸缩机构的伸缩运动和所述旋转机构的旋转运动。
12、进一步地,所述机械手手夹包括手夹本体、夹持机构和底部支撑机构;所述夹持机构沿所述手夹本体轴线方向设置,用于夹取所述目标物体;所述底部支撑机构垂直设于所述手夹本体轴线方向且位于所手夹本体的底部,用于支撑所述目标物体。
13、进一步地,所述夹持机构包括两个平行设置的夹持基板和夹紧部件,所述夹持基板的一端通过所述夹紧部件嵌设于所述手夹本体的侧面,所述夹紧部件带动两个夹持基板相向或相背运动,调节所述夹持基板之间的距离;所述底部支撑机构包括支撑板和伸缩部件,所述支撑板通过所述伸缩部件连接所述手夹本体,所述伸缩部件用于调节所述支撑板与所述手夹本体之间的距离。
14、进一步地,所述摄像装置为视觉定位相机,安装于所述机械手手夹下方,与上位机信号连接,接收所述上位机的控制信号,控制所述机械手手夹定位目标物体。
15、进一步地,所述rfid识别装置分别设于所述机械手手夹的内侧和外侧,所述内侧的rfid识别装置为线极化近距离的rfid识别装置,用于对所述目标物体进行精确识别,所述外侧的rfid识别装置为圆极化的远距离rfid识别装置,用于对目标区域的物体进行批量识别。
16、进一步地,所述机械手手夹还包括第三电机驱动单元,用于驱动所述机械手手夹的运动,所述机械手手夹设有力反馈模块,用于实现恒力抓取所述目标物体及空夹检测功能。
17、进一步地,所述第一电机驱动单元、所述第二电机驱动单元和所述第三电机驱动单元均设置为伺服电机驱动单元。
18、上述技术方案具有如下优点或有益效果:
19、本发明方案的一种档案管理装置,通过在库房中设置覆盖所有档案柜的轨道单元和在轨道单元上滑动的抓取单元,接收到上位机的指令后能够自动定位并取出目标物体或将目标物体放置到指定位置,还能够对库房的档案进行自动盘点,实现了对档案柜中所有档案的自动化管理;机械手悬臂通过滑块和同步带在轨道单元上的自由滑动,其自身可以伸缩和旋转,使机械手手夹可到达库房档案柜中的任意位置;机械手手夹中夹持基板的间距和支撑板的高度可以根据待抓取档案的大小进行调整,提高了抓取档案的稳定性和适用性;通过机械手手夹上的rfid识别装置和视觉定位相机能够快速准确的定位到目标档案并定期校准机械手手夹定位的精度,大大提高了档案管理的工作效率、降低了人力成本和时间成本,提高了档案管理的安全系数和管理质量,也推进了档案管理的智能化发展。
技术特征:
1.一种档案管理装置,其特征在于,包括轨道单元和抓取单元,所述抓取单元在所述轨道单元内滑动;
2.根据权利要求1所述的一种档案管理装置,其特征在于,所述档案柜的存储单元和档案存储格位设定标准位置信息,所述标准位置信息为三维坐标值,所述机械手悬臂带动所述机械手手夹预先通过所述视觉定位相机采集所有所述存储单元与所述档案存储格位上的二维码信息及图像信息,执行所述档案入库和所述档案出库操作时,所述视觉定位相机再次采集所述存储单元与所述档案存储格位上的二维码信息及图像信息上传至所述上位机,所述上位机进行位置偏移量计算和位置自动校准。
3.根据权利要求1所述的一种档案管理装置,其特征在于,所述定轨和所述动轨均设有若干感应器;
4.根据权利要求1所述的一种档案管理装置,其特征在于,所述轨道单元还包括同步带和滑块机构,所述滑块机构分别安装于所述定轨和所述动轨上,所述同步带安装于所述定轨和所述动轨的外侧;所述滑块机构为双滑块机构,所述同步带为齿面加布基同步带。
5.根据权利要求4所述的一种档案管理装置,其特征在于,所述机械手悬臂与所述动轨上的滑块机构固定连接,所述机械手悬臂为六轴机械臂,包括伸缩机构、旋转机构和第二电机驱动单元;所述伸缩机构的一端与所述滑块机构固定连接,所述伸缩机构的另一端与所述旋转机构连接;所述伸缩机构用于所述第三方向伸缩,所述伸缩机构伸长时,可沿所述第一方向和所述第二方向运行;所述旋转机构下方连接所述机械手手夹,所述旋转机构可在所述第一方向与所述第二方向确定的平面上旋转;所述第二电机驱动单元用于驱动所述伸缩机构的伸缩运动和所述旋转机构的旋转运动。
6.根据权利要求1所述的一种档案管理装置,其特征在于,所述机械手手夹包括手夹本体、夹持机构和底部支撑机构;所述夹持机构沿所述手夹本体的轴线方向设置,用于夹取所述目标物体;所述底部支撑机构垂直设于所述手夹本体的轴线方向且位于所手夹本体的底部,用于支撑所述目标物体。
7.根据权利要求6所述的一种档案管理装置,其特征在于,所述夹持机构包括两个平行设置的夹持基板和夹紧部件,所述夹持基板的一端通过所述夹紧部件嵌设于所述手夹本体的侧面,所述夹紧部件带动两个所述夹持基板相向或相背运动,调节所述夹持基板之间的距离;所述底部支撑机构包括支撑板和伸缩部件,所述支撑板通过所述伸缩部件连接所述手夹本体,所述伸缩部件用于调节所述支撑板与所述手夹本体之间的距离。
8.根据权利要求1所述的一种档案管理装置,其特征在于,所述视觉定位相机安装于所述机械手手夹下方,与所述上位机信号连接,接收所述上位机的控制信号,控制所述机械手手夹定位所述目标物体。
9.根据权利要求1所述的一种档案管理装置,其特征在于,所述rfid识别装置分别设于所述机械手手夹的内侧和外侧,内侧的所述rfid识别装置为线极化近距离的rfid识别装置,当执行所述档案入库和所述档案出库操作时,启动内侧的所述rfid识别装置识别待处理档案的档案信息和档案的存储位置信息;外侧的所述rfid识别装置为圆极化远距离的rfid识别装置,当执行自动盘点操作时,启动外侧的所述rfid识别装置,所述上位机生成对所述档案柜遍历的运行路线并发送至所述档案管理装置,所述机械手悬臂带动所述机械手手夹依据运行路线识别所述档案柜中的所有档案信息和档案的存储位置信息。
10.根据权利要求5所述的一种档案管理装置,其特征在于,所述机械手手夹还包括第三电机驱动单元,用于驱动所述机械手手夹的运动,所述机械手手夹设有力反馈模块,用于实现恒力抓取所述目标物体及空夹检测功能。
11.根据权利要求10所述的一种档案管理装置,其特征在于,所述第一电机驱动单元、所述第二电机驱动单元和所述第三电机驱动单元均为伺服电机驱动单元。
技术总结
本发明公开了一种档案管理装置,通过在档案柜上方设置轨道单元,并且轨道单元覆盖待管理的若干档案柜,为该装置对档案的管理提供了基础;轨道单元中设有定轨和在定轨上滑动的动轨,动轨上设有抓取单元,用于自动抓取和运送档案;抓取单元上设有RFID识别装置和摄像装置实现了档案的自动盘点,提升了存取档案的精度;通过该档案管理装置对档案的自动化管理,大大提高了档案管理的工作效率。
技术研发人员:司海涛,吴巍
受保护的技术使用者:立芯科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!