交互式补偿系统及智能立体轨道运载装备
本申请涉及智能装备领域,具体而言涉及一种交互式补偿系统及智能立体轨道运载装备。
背景技术:
1、现有智能立体仓储系统中通常通过纵横交错的轨道引导运载装备实现四向行走,以便对货物进行搬运或存储。现有智能立体仓储系统中的运载设备通常设置为具有运转方向相互正交的两组行走轮,由此,其可通过不同运转方向上的行走轮分别沿纵横两个方向的轨道运行,带动设备及其所承载的货物进行横纵两个方向的移动。
2、但是,现有智能立体仓储系统中的运载系统存在以下缺陷:
3、现有设备的行走轮通常采用密胺脂等高分子材料,其在与轨道接触运行的过程中难免会产生磨损,因此需要定期进行维护更换,否则会影响设备运行;
4、由于现有设备运行时需要保证行走轮与轨道稳定接触,且轨道需保持裸露,因此还需要定期对轨道上异物进行检修清理,否则容易出现设备运行颠簸甚至卡死或货物倾覆,并且运行噪音较大;
5、现有设备一旦在运行途中出现故障将难以返回基站,需要维护人员进入架体中原地进行维修,导致维护人员作业风险增加,容易在智能立体仓储货架中发生意外。
技术实现思路
1、本申请针对现有技术的不足,提供一种交互式补偿系统及智能立体轨道运载装备,本申请通过磁悬浮的方式实现对轨道运载装备的双向驱动,能够通过对运载装备运行姿态的检测利用电磁阵列实现灵活换向,在故障状态下保障运载装备能够平稳回站实现检修。本申请具体采用如下技术方案。
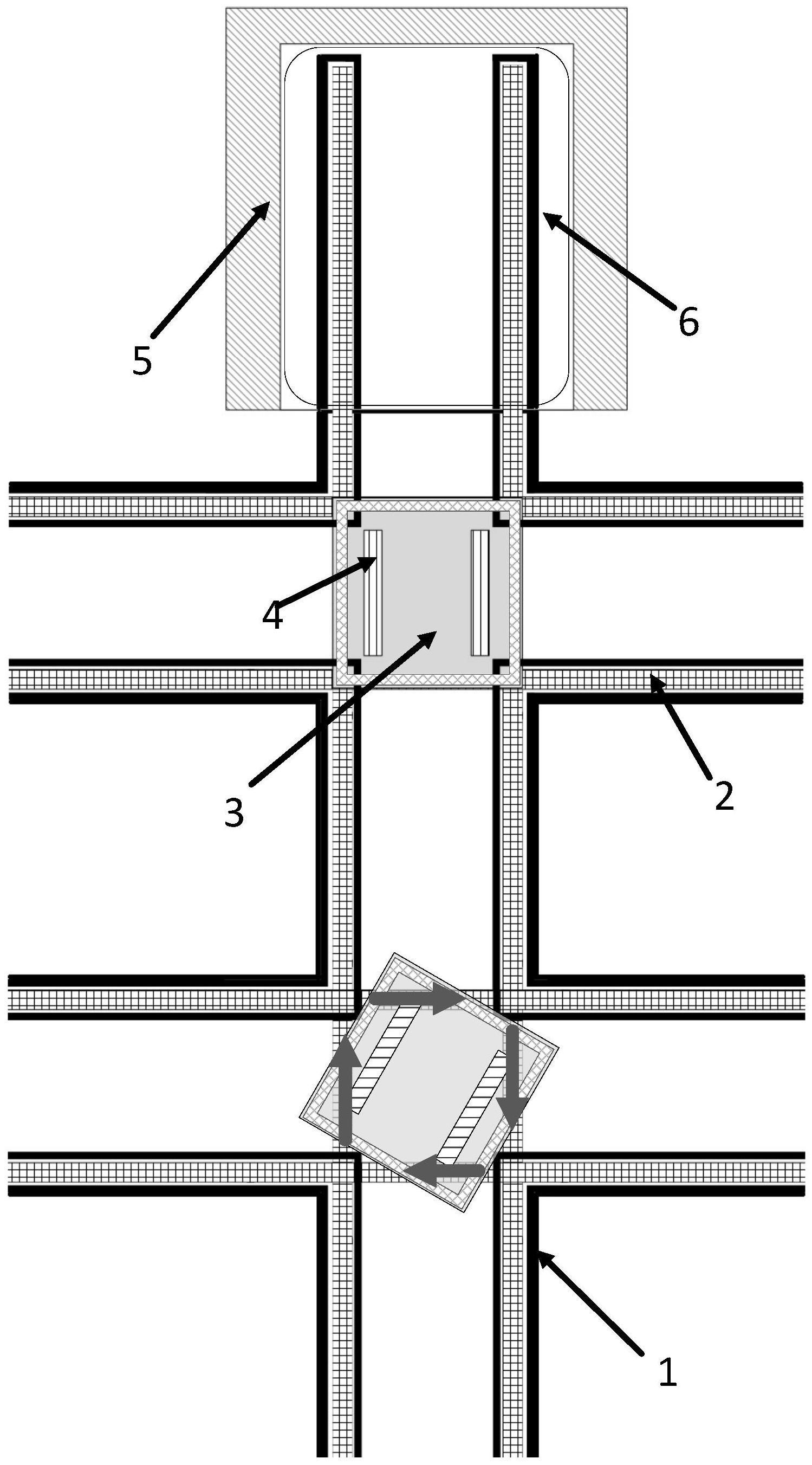
2、首先,为实现上述目的,提出一种智能立体轨道运载装备,其包括:车身主体,其运行在磁悬浮轨道中,至少在其底面四周设置有底部磁体阵列,所述底部磁体阵列悬浮运行于磁悬浮轨道的底部磁轨阵列上方;载货架,其可升降地设置在车身主体的顶部,用于向上顶升货物使货物脱离磁悬浮轨道实现货物运输,或向下撤销顶升使货物落于磁悬浮轨道上臂的存储仓位中;感应器,其设置于载货架的升降顶升机构上,用于检测车身主体相对磁悬浮轨道的运行姿态以触发升降顶升机构调节载货架的升降高度。
3、可选的,如上任一所述的智能立体轨道运载装备,其所运行的磁悬浮轨道中布置有横纵双向的可控磁体阵列;车身主体沿磁悬浮轨道运行方向的四边等长。
4、可选的,如上任一所述的智能立体轨道运载装备,其中,所述车身主体的四角还设置有外凸出于车身主体的导向轮;所述磁悬浮轨道中,还在横纵双向交叉处的轨道侧壁转折位置设置有弧形引导面,车身主体运行过程中,所述弧形引导面的一侧向外旋转至外凸于非运行方向的角度位置,另一侧向内旋转至贴近于运行方向轨道侧壁的角度位置。
5、可选的,如上任一所述的智能立体轨道运载装备,其中,所述车身主体还在顶面四周设置有顶部磁体阵列,所述顶部磁体阵列悬浮运行于磁悬浮轨道的顶部磁轨阵列下方;所述磁悬浮轨道为具有开口向内的c字形直线轨道,顶部磁轨阵列与底部磁轨阵列分别固定于所述c字形直线轨道的上、下两臂,且安装于c字形直线轨道的开口内部。
6、可选的,如上任一所述的智能立体轨道运载装备,其中,所述顶部磁体阵列以及顶部磁轨阵列均分别设置有上下两层磁组阵列,顶部磁体阵列以及顶部磁轨阵列的上下两层磁组阵列均分别将轨道内外两侧边缘的磁体布置为具有竖直磁化方向,上下两层磁组阵列中位于轨道中间位置的磁体布置为具有水平磁化方向;顶部磁体阵列的上下两层磁组阵列中,相同驱动位置的磁体具有相同的水平磁化方向;顶部磁轨阵列的上下两层磁组阵列中,相同驱动位置的磁体具有相同的水平磁化方向;顶部磁体阵列与顶部磁轨阵列之间,相同驱动位置上磁体的竖直磁化方向相同,相同坐标位置上磁体的水平磁化方向相反。
7、可选的,如上任一所述的智能立体轨道运载装备,其中,磁悬浮轨道的底部磁轨阵列中,每一个磁体单元均分别设置为具有两组电磁线圈,其中一组电磁线圈具有水平磁化方向,其中另一组电磁线圈具有竖直磁化方向。
8、可选的,如上任一所述的智能立体轨道运载装备,其中,所述底部磁轨阵列被设置为:配合于车身主体的偏转方向,按照预设的运行速度调整对底部磁轨阵列中各磁体单元的驱动信号。
9、可选的,如上任一所述的智能立体轨道运载装备,其中,所述顶部磁轨阵列被设置为配合于车身主体的偏转方向调节竖直磁化方向磁体的磁场强度。
10、同时,为实现上述目的,本申请还提供一种交互式补偿系统,其中,用于如上任一所述的智能立体轨道运载装备,所述感应器包括分别设置于载货架升降顶升机构上下两端的两组磁传感器;传感器感应于顶部磁体阵列以及顶部磁轨阵列之间的磁场强度,检测车身主体相对磁悬浮轨道的高度位置以触发升降顶升机构调节载货架的升降高度;两组磁传感器感应于顶部磁体阵列以及顶部磁轨阵列之间的磁场变化,检测车身主体相对磁悬浮轨道的行走位置以反馈至磁悬浮轨道控制系统,触发底部磁轨阵列配合于车身主体的偏转方向按照预设的运行速度调整对底部磁轨阵列中各磁体单元的驱动信号,并相应触发顶部磁轨阵列配合于车身主体的偏转方向调节竖直磁化方向磁体的磁场强度。
11、可选的,如上任一所述的交互式补偿系统,其中,所述磁悬浮轨道控制系统还响应于磁传感器对车身主体行走位置的检测而触发磁悬浮轨道中交叉位置的相应弧形引导面向外旋转至外凸于非运行方向的角度位置,或向内旋转至贴近于运行方向轨道侧壁的角度位置。
12、有益效果
13、本申请提供一种交互式补偿系统及智能立体轨道运载装备。其通过磁体阵列将车身主体维持在磁悬浮轨道中驱动其运行。本申请在车身主体四周布置有四向的磁体阵列,并相应地在横纵双向的磁悬浮轨道中均分别布置相信的磁轨阵列。由此,本申请的车身主体可仅利用一组磁体阵列沿轨道实现运行,而在任意一侧磁体单元出线故障时,通过轨道交叉位置所形成的磁轨圈实现转向,从而切换至利用另一侧正常工作的磁体阵列驱动车身返回维修点进行故障检修。本申请可通过无线方式,或通过沿轨道布置的信号接口实现对车身位置、姿态的实时相应,并相应调整对磁轨中各磁体单元的驱动,实现对车身运行装状况的灵活调整。本申请可有效降低立体轨道运载装备运行噪音,减少对运载装备行走系统的定期更换,方便维护人员对故障设备进行维护检修,有效降低维护人员的作业风险。
14、本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。
技术特征:
1.一种智能立体轨道运载装备,其特征在于,包括:
2.如权利要求1所述的智能立体轨道运载装备,其特征在于,其所运行的磁悬浮轨道中布置有横纵双向的可控磁体阵列;
3.如权利要求2所述的智能立体轨道运载装备,其特征在于,所述车身主体(3)的四角还设置有外凸出于车身主体(3)的导向轮(33);
4.如权利要求1-3所述的智能立体轨道运载装备,其特征在于,所述车身主体(3)还在顶面四周设置有顶部磁体阵列(31),所述顶部磁体阵列(31)悬浮运行于磁悬浮轨道的顶部磁轨阵列(21)下方;
5.如权利要求4所述的智能立体轨道运载装备,其特征在于,所述顶部磁体阵列(31)以及顶部磁轨阵列(21)均分别设置有上下两层磁组阵列,顶部磁体阵列(31)以及顶部磁轨阵列(21)的上下两层磁组阵列均分别将轨道内外两侧边缘的磁体布置为具有竖直磁化方向,上下两层磁组阵列中位于轨道中间位置的磁体布置为具有水平磁化方向;
6.如权利要求1-5所述的智能立体轨道运载装备,其特征在于,磁悬浮轨道的底部磁轨阵列(22)中,每一个磁体单元均分别设置为具有两组电磁线圈,其中一组电磁线圈具有水平磁化方向,其中另一组电磁线圈具有竖直磁化方向。
7.如权利要求1-6所述的智能立体轨道运载装备,其特征在于,所述底部磁轨阵列(22)被设置为:配合于车身主体(3)的偏转方向,按照预设的运行速度调整对底部磁轨阵列(22)中各磁体单元的驱动信号。
8.如权利要求7所述的智能立体轨道运载装备,其特征在于,所述顶部磁轨阵列(21)被设置为配合于车身主体(3)的偏转方向调节竖直磁化方向磁体的磁场强度。
9.一种交互式补偿系统,其特征在于,用于如权利要求1-8任一所述的智能立体轨道运载装备,所述感应器(40)包括分别设置于载货架(4)升降顶升机构上下两端的两组磁传感器;
10.如权利要求9所述的交互式补偿系统,其特征在于,所述磁悬浮轨道控制系统还响应于磁传感器对车身主体(3)行走位置的检测而触发磁悬浮轨道中交叉位置的相应弧形引导面(23)向外旋转至外凸于非运行方向的角度位置,或向内旋转至贴近于运行方向轨道侧壁的角度位置。
技术总结
本申请提供一种交互式补偿系统及智能立体轨道运载装备。其通过磁体阵列将车身主体维持在磁悬浮轨道中驱动其运行。本申请在车身主体四周布置有四向的磁体阵列,并相应地在横纵双向的磁悬浮轨道中均分别布置相信的磁轨阵列。由此,本申请的车身主体可仅利用一组磁体阵列沿轨道实现运行,而在任意一侧磁体单元出线故障时,通过轨道交叉位置所形成的磁轨圈实现转向,从而切换至利用另一侧正常工作的磁体阵列驱动车身返回维修点进行故障检修。本申请可有效降低立体轨道运载装备运行噪音,减少对运载装备行走系统的定期更换,方便维护人员对故障设备进行维护检修,有效降低维护人员的作业风险。
技术研发人员:李馨恬
受保护的技术使用者:南京农业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!