电驱卷扬浮动控制装置、钻机以及电驱卷扬浮动控制方法与流程
本发明涉及工程机械领域,具体涉及一种电驱卷扬浮动控制装置、钻机以及电驱卷扬浮动控制方法。
背景技术:
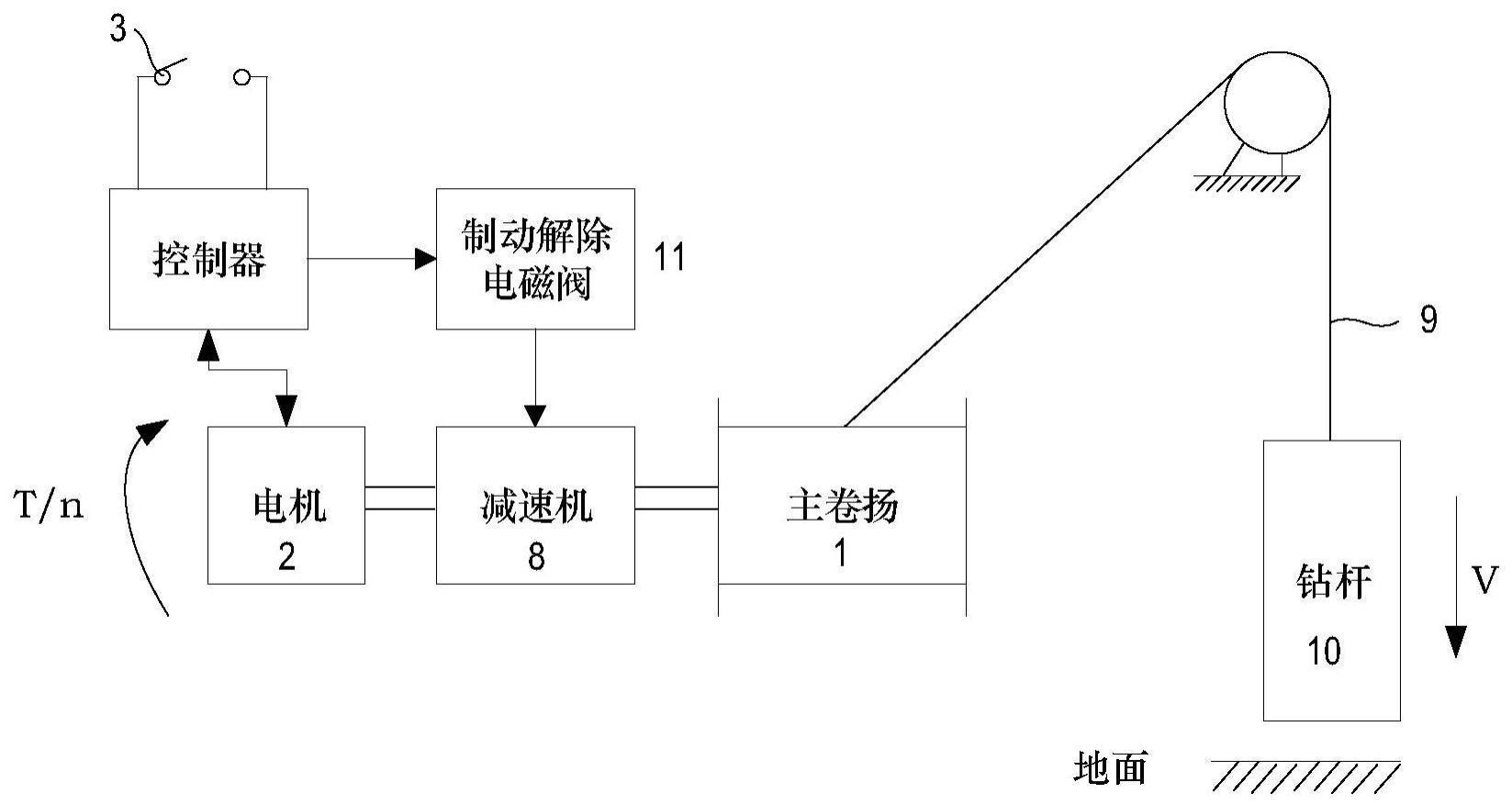
1、旋挖钻机是一种桩工类的成孔作业设备,其包括卷扬、缠绕于卷扬的钢丝绳、与钢丝绳连接的钻杆。在进行旋挖钻孔作业时,钻杆受自身重力和加压力作用而向地下进尺钻进,要求主卷扬钢丝绳处于放松状态,也即浮动状态。
2、根据卷扬被驱动的方式的不同,旋挖钻机分为液压马达驱动卷扬、电机驱动卷扬两大类。
3、发明人发现,对于液压马达驱动卷扬的类型,卷扬机构上安装有浮动电磁阀,通过驾驶室内的卷扬浮动开关,控制浮动电磁阀的开闭,从而使主卷扬马达的进、回油腔导通,这样就可以实现卷扬浮动。浮动开关打开时,卷扬受钻杆重力作用而逐渐放绳,钻杆重力和马达回油背压相互平衡后匀速放绳,直至钻杆触地。触地后,虽然卷扬马达的进、回油腔仍是导通状态,但是卷扬失去了钻杆重力作用,且液压马达本身的转动惯量很小,放绳速度在很短的时间内就降低至0,之后不会继续放绳。因此,马达驱动的卷扬机构浮动具有控制简单易行、停止速度快的特点。
4、发明人进一步研究发现,适用于液压马达驱动卷扬类型的浮动控制方法,却并不适用于电机驱动卷扬的结构。因为电机转动惯量比液压马达大很多,其速度难以控制。所以,对于电机驱动卷扬的旋挖钻机,目前难以实现浮动状态。
技术实现思路
1、本发明提出一种电驱卷扬浮动控制装置、钻机以及电驱卷扬浮动控制方法,用以实现对电驱卷扬的浮动控制,且浮动速度可调、触地后钢丝绳不会过放。
2、本发明实施例提供了一种电驱卷扬浮动控制装置,包括:
3、卷扬;
4、电机,与卷扬驱动连接;
5、浮动控制开关;
6、浮动信号模块,与浮动控制开关电连接,且被配置为在浮动控制开关被按下时输出浮动开始信号、在浮动控制开关断开时输出浮动停止信号;
7、速度检测与判断模块,与卷扬电连接,以实时检测卷扬的下放速度;
8、扭矩控制模块,与速度检测与判断模块、电机均电连接;扭矩控制模块被配置为根据速度检测与判断模块检测到的速度控制电机的扭矩;以及
9、速度控制模块,与浮动信号模块、电机均电连接;速度控制模块被配置为在浮动信号模块输出浮动停止信号时,向电机输出速度为0的信号。
10、在一些实施例中,扭矩控制模块还被配置为在速度控制模块向电机输出速度为0的信号后,延迟设定时长,向电机输出扭矩为0的信号。
11、在一些实施例中,扭矩控制模块被配置为根据速度检测与判断模块检测到的速度控制电机的扭矩,具体包括:
12、当速度检测与判断模块检测到的速度v≦v1,则扭矩控制模块控制电机的扭矩为t1;
13、当速度检测与判断模块检测到的速度v1<v≦v2,则扭矩控制模块控制电机的扭矩为t2;
14、当速度检测与判断模块检测到的速度v2<v,则扭矩控制模块控制电机的扭矩为t3;
15、其中,0<t1<t2<t3<tmax,tmax为电机的最大扭矩。
16、在一些实施例中,t1、t2、t3的方向均为卷扬上提的方向。
17、在一些实施例中,t1与卷扬上缠绕的钢丝绳涨紧至刚脱离松弛状态所需的扭矩大小相同,且远小于与卷扬的钢丝绳连接的钻杆重力所产生的扭矩tp;tp=m*g*r*i;
18、其中,m为钻杆重量;g为重力加速度;r为卷扬上钢丝绳的缠绕半径;i为电机与卷扬之间的传动比。
19、本发明实施例还提供一种钻机,包括本发明任一技术方案所提供的电驱卷扬浮动控制装置。
20、本发明实施例又提供一种电驱卷扬浮动控制方法,包括以下步骤:
21、在接收到浮动开始信号时,检测卷扬的下放速度;
22、计算卷扬的下放速度所处的速度区间,并根据速度区间控制电机的扭矩。
23、在一些实施例中,速度区间与电机扭矩的对应关系为:
24、当卷扬的下放速度v≦v1,则电机的扭矩为t1;
25、当卷扬的下放速度v1<v≦v2,则电机的扭矩为t2;
26、当卷扬的下放速度v2<v,则电机的扭矩为t3;
27、其中,0<t1<t2<t3<tmax,tmax为电机的最大扭矩。
28、在一些实施例中,t1、t2、t3的方向均为卷扬上提的方向。
29、在一些实施例中,t1与卷扬上缠绕的钢丝绳涨紧至刚脱离松弛状态所需的扭矩大小相同,且远小于与卷扬的钢丝绳连接的钻杆重力所产生的扭矩tp;tp=m*g*r*i;
30、其中,m为钻杆重量;g为重力加速度;r为卷扬上钢丝绳的缠绕半径;i为电机与卷扬之间的传动比。
31、在一些实施例中,t2=tv,a,其中a是参数,其数值可调。
32、在一些实施例中,电驱卷扬浮动控制方法还包括以下步骤:
33、在接收到浮动停止信号时,向电机输出速度为0的信号。
34、在一些实施例中,电驱卷扬浮动控制方法还包括以下步骤:
35、在向电机输出速度为0的信号后,延迟设定时长,向电机输出扭矩为0的信号。
36、上述技术方案提供的电驱卷扬浮动控制装置,包括卷扬、电机、浮动控制开关、浮动信号模块、速度检测与判断模块、扭矩控制模块以及速度控制模块。在需要对卷扬进行浮动控制时,需要让与卷扬连接的钢丝绳处于放松状态。通过浮动控制开关可以实时获取是否需要进行浮动控制的信号。如果需要进行浮动控制,则由速度检测与判断模块实时检测卷扬的下放速度,根据卷扬的下放速度所处的区间,采用扭矩控制模块针对性地对电机施加所需要的扭矩。如果不需要进行浮动控制,则采用速度控制模块对卷扬的转速复位至0。上述技术方案,在卷扬的下放速度快时,所施加给电机的扭矩也大;反之,卷扬的下放速度快时,所施加给电机的扭矩也小。并且所施加的扭矩根据下放速度实时多次调整,直至可以平衡与卷扬的钢丝绳连接的钻杆的自重,以实现卷扬的转速、钻杆的下降速度分阶段递减,实现电机大扭矩下快速地减速、小扭矩下稳定地涨紧,且减速过程和涨紧过程无缝衔接,钢丝绳既不会过放,也不会反卷。
技术特征:
1.一种电驱卷扬浮动控制装置,其特征在于,包括:
2.根据权利要求1所述的电驱卷扬浮动控制装置,其特征在于,所述扭矩控制模块(6)还被配置为在所述速度控制模块(7)向所述电机(2)输出速度为0的信号后,延迟设定时长,向所述电机(2)输出扭矩为0的信号。
3.根据权利要求1所述的电驱卷扬浮动控制装置,其特征在于,所述扭矩控制模块(6)被配置为根据所述速度检测与判断模块(5)检测到的速度控制所述电机(2)的扭矩,具体包括:
4.根据权利要求3所述的电驱卷扬浮动控制装置,其特征在于,所述t1、t2、t3的方向均为所述卷扬(1)上提的方向。
5.根据权利要求3所述的电驱卷扬浮动控制装置,其特征在于,所述t1与所述卷扬(1)上缠绕的钢丝绳(9)涨紧至刚脱离松弛状态所需的扭矩大小相同,且远小于与所述卷扬(1)的钢丝绳(9)连接的钻杆(10)重力所产生的扭矩tp;tp=m*g*r*i;
6.一种钻机,其特征在于,包括权利要求1~5任一所述的电驱卷扬浮动控制装置。
7.一种电驱卷扬浮动控制方法,其特征在于,包括以下步骤:
8.根据权利要求7所述的电驱卷扬浮动控制方法,其特征在于,所述速度区间与所述电机(2)扭矩的对应关系为:
9.根据权利要求8所述的电驱卷扬浮动控制方法,其特征在于,所述t1、t2、t3的方向均为所述卷扬(1)上提的方向。
10.根据权利要求8所述的电驱卷扬浮动控制方法,其特征在于,所述t1与所述卷扬(1)上缠绕的钢丝绳(9)涨紧至刚脱离松弛状态所需的扭矩大小相同,且远小于与所述卷扬(1)的钢丝绳(9)连接的钻杆(10)重力所产生的扭矩tp;tp=m*g*r*i;
11.根据权利要求8所述的电驱卷扬浮动控制方法,其特征在于,t2=t(v,a),其中a是参数,其数值可调。
12.根据权利要求7所述的电驱卷扬浮动控制方法,其特征在于,还包括以下步骤:
13.根据权利要求12所述的电驱卷扬浮动控制方法,其特征在于,还包括以下步骤:
技术总结
本发明公开了一种电驱卷扬浮动控制装置、钻机以及电驱卷扬浮动控制方法,涉及工程机械领域,用以实现对电驱卷扬的浮动控制,且浮动速度可调、触地后钢丝绳不会过放。该装置包括:电机,与卷扬驱动连接;浮动信号模块,与浮动控制开关电连接。速度检测与判断模块,与卷扬电连接;扭矩控制模块与速度检测与判断模块、电机均电连接;扭矩控制模块被配置为根据速度检测与判断模块检测到的速度控制电机的扭矩;速度控制模块,与浮动信号模块、电机均电连接;速度控制模块被配置为在浮动信号模块输出浮动停止信号时,向电机输出速度为0的信号。上述技术方案,实现了卷扬快速减速、稳定涨紧,且钢丝绳既不会过放,也不会反卷。
技术研发人员:刘志刚,马旭,唐恒玉,张永华,耿倩斌,王凯,马红冬
受保护的技术使用者:徐州徐工基础工程机械有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!