利用码垛运载机器人辅助电梯载荷检测的方法
本发明涉及电梯检测,具体为一种利用码垛运载机器人辅助电梯载荷检测的方法。
背景技术:
1、电梯作为人们日常生活重要的运载工具,在人们的生活中扮演着重要的角色,尤其是人口较密集、资源较为集中的大城市,电梯的存在对于高层建筑而言是不可或缺的。随着电梯使用量的不断增长,发生电梯事故的概率也日趋增加。电梯曳引能力是电梯安全运行的基础,电梯曳引能力的检测方法为:对电梯进行空载、25%、50%、75%、100%、125%的额定载荷下进行曳引能力检测,其中施加的载荷则由标准砝码按需叠加构成。实务中,标准砝码需要人工搬运,而标准砝码的重量从20-50kg不等,人工搬运具有劳动强度大、成本高、搬运时间长、易造成人身伤害等问题。
2、中国专利文献cn110744556a公开了一种采用运载码垛机器人进行电梯检测的方法,其采用特制的运载码垛机器人对电梯的曳引力进行检测,特制的运载码垛机器人包括机器人本体和配套的若干配重块;机器人本体包括行走机构和配重调节机构,行走机构与配重调节机构两者在头部位置相互铰接,并且通过角度调节机构控制两者之间的夹角大小,配重调节机构包括转动托板、码垛机构和配重堆放机构。电梯检测方法包括检测机器人整体移动到位,检测机器人配重调节等步骤。该发明创造实现了配重块的自动装载调整,节省了人工。但是,其具有如下不足之处:1结构复杂,如其重调节机构就包括转动托板、码垛机构和配重堆放机构,配重堆放机构包括固定在堆放板体上的堆放挡板、设置在配重块夹口头部的定位挡板、设置在配重块夹口尾部开口处的转动挡板,使得堆放砝码的空间缩小,难以满足额定载荷值的25%、50%、75%、100%、125%的五级试验载荷需求。2由于设置了堆放板体、定位挡板等的设置,使得配重块需要越过这些板体的上方才能实现移动;3码垛机构采用直角坐标滑块模组,机械臂可移动范围局限,仅限于在配重堆放区与配重装卸区之间移动,其配重下车的程序为:首先将配重块放置在配重装卸区处,然后打开转动挡板和配重块夹口,同时收进伸缩定位板,最后启动行走机构离开配重块,完成配重块与机器人本体的分离。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种利用码垛运载机器人辅助电梯载荷检测的方法,采用相对简单的结构实现砝码在砝码承载平台与电梯仓之间的转移,以增加砝码的运载量使其可满足五级试验载荷需求。
2、为了实现上述目的,本发明的技术方案如下:
3、利用码垛运载机器人辅助电梯载荷检测的方法,包括如下步骤,
4、s1、码垛运载机器人携砝码进入电梯仓,所述码垛运载机器人包括行走机构和砝码承载平台,砝码承载平台上设置有砝码移送机构,砝码移送机构采用配设有砝码夹爪的直角坐标滑块模组,砝码承载平台除在侧边为直角坐标滑块模组设置支撑部外仅作为配重堆放区使用;支撑部为移动支撑部,使得直角坐标滑块模可整体水平移动;当需要将砝码水平移出或移回砝码承载平台前,直角坐标滑块模的一端可朝砝码承载平台之外的空间延伸;
5、s2、配设有砝码夹爪的直角坐标滑块模组按需把砝码移出砝码承载平台后置于电梯仓内,其中,砝码承载平台上靠近直角坐标滑块模朝外可延伸端的砝码优先被移出砝码承载平台;
6、s3、码垛运载机器人驶离电梯仓,进行一次电梯载荷检测;
7、s4、重复步骤s2、s3,按需完成电梯载荷检测;
8、s5、配设有砝码夹爪的直角坐标滑块模组把电梯仓内的砝码移回砝码承载平台,其中,砝码优先被置于砝码承载平台上远离直角坐标滑块模朝外可延伸端的区域。
9、作为改进,所述支撑部具有用于驱动其水平移动的支撑部移动底座。
10、作为一种可替代的方案,支撑部为固定支持部,直角坐标滑块模组具有延伸段,延伸段延伸至砝码承载平台之外使得砝码夹爪可将砝码水平移出或移回砝码承载平台,砝码承载平台上靠近延伸段的砝码优先被移出砝码承载平台;当把电梯仓内的砝码移回砝码承载平台时,砝码优先被置于砝码承载平台上远离延伸段的区域。
11、作为改进,所述直角坐标滑块模组包括纵向支架、横向支架、竖直支架,纵向支架对称分列于砝码承载平台的两侧,纵向支架通过支撑部与砝码承载平台连接,横向支架活动连接于两个纵向支架之间并可沿着纵向支架移动,竖直支架活动连接于横向支架上并可相对于横向支架实现水平方向和竖直方向上的移动,砝码夹爪固定于竖直支架的底部。
12、作为进一步改进,所述支撑部为分列于砝码承载平台两侧的升降台,升降台使得纵向支架能在竖直方向上移动。
13、作为改进,所述纵向支架上设置有定位滑块,横向支架通过定位滑块与纵向支架活动连接;所述横向支架上设置有定位滑块,竖直支架通过定位滑块与横向支架活动连接。
14、作为进一步改进,所述定位滑块在其相对的两个面上分别设置有用于与纵向支架、或横向支架、或竖直支架连接的卡口。
15、作为改进,所述横向支架在其一端设置有滑动电机,所述竖直支架在其顶端设置有升降电机。
16、作为进一步改进,所述支撑部在其上部的侧面设置有加强肋。
17、作为进一步改进,所述砝码承载平台上设置有用于对砝码限位的凸起部。
18、本发明的有益效果是:与中国专利文献cn110640715a相比,本申请摈弃了相对复杂的结构,砝码取走、放回砝码承载平台的操作均由直角坐标滑块模组完成。其次,纵向支架的端部可伸出于砝码承载平台之外使得砝码需经由砝码承载平台之外的空间才能上下砝码承载平台,砝码承载平台除在侧边为直角坐标滑块模组设置支撑部外仅作为配重堆放区使用,使砝码承载平台上可以尽可能多地放置砝码,从而满足五级试验载荷的需求。第三,连接于横向支架上的竖直支架和分列于砝码承载平台两侧的升降台,均能在竖直方向移动,可以使砝码层叠起来,从而使砝码承载平台可以进一步增加砝码的携带数量。第四,砝码在竖直方向的移动可主要由分列于砝码承载平台两侧的升降台来完成,与竖直支架单臂提升相比,更稳定可靠,也有利于提高竖直支架的使用寿命。
技术特征:
1.利用码垛运载机器人辅助电梯载荷检测的方法,其特征在于:包括如下步骤,
2.根据权利要求1所述的利用码垛运载机器人辅助电梯载荷检测的方法,其特征在于:所述支撑部(34)具有用于驱动其水平移动的支撑部移动底座(35)。
3.利用码垛运载机器人辅助电梯载荷检测的方法,其特征在于:包括如下步骤,
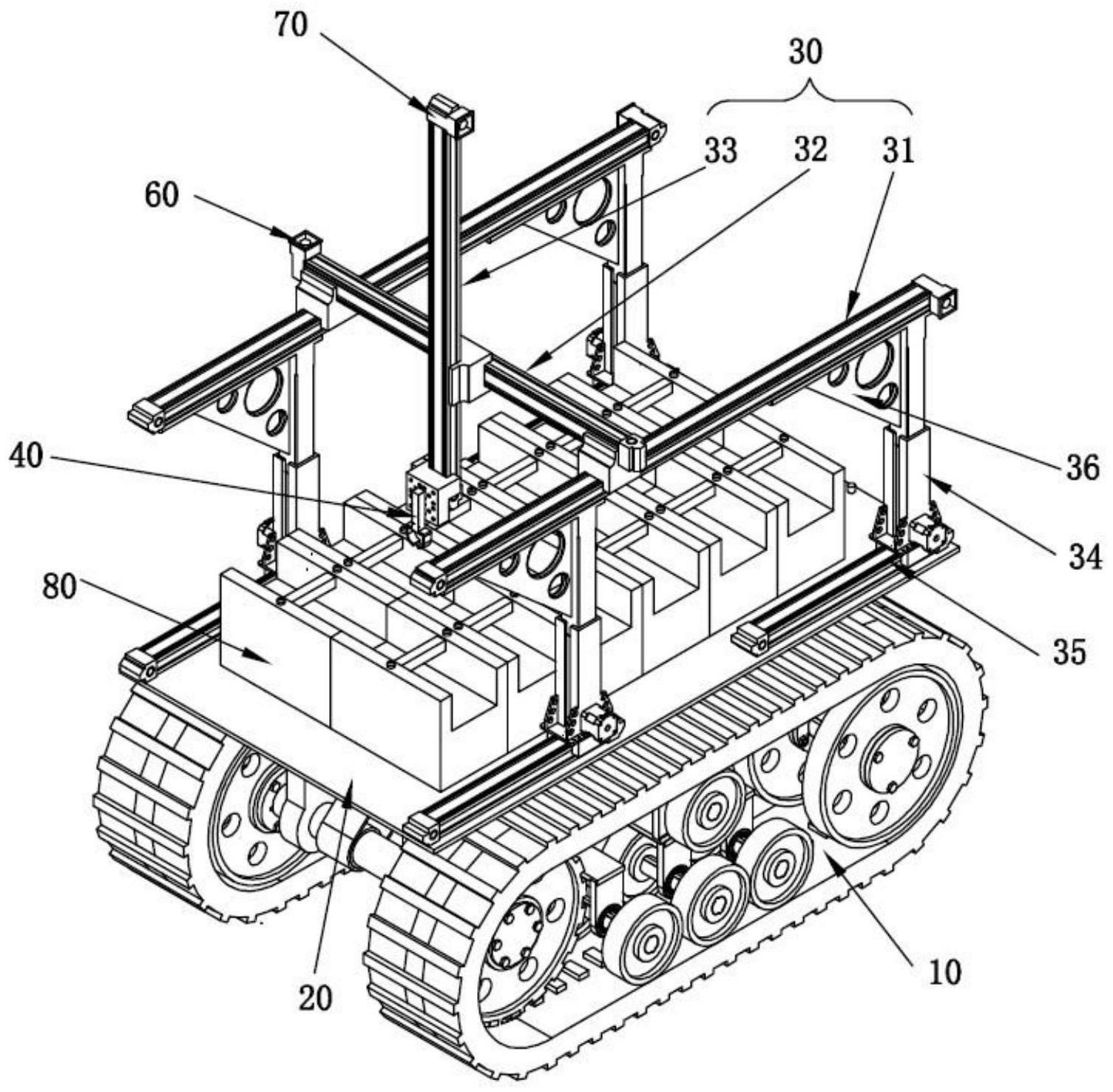
4.根据权利要求1或3所述的利用码垛运载机器人辅助电梯载荷检测的方法,其特征在于:所述直角坐标滑块模组包括纵向支架(31)、横向支架(32)、竖直支架(33),纵向支架(31)对称分列于砝码承载平台(20)的两侧,纵向支架(31)通过支撑部(34)与砝码承载平台(20)连接,横向支架(32)活动连接于两个纵向支架(31)之间并可沿着纵向支架(31)移动,竖直支架(33)活动连接于横向支架(32)上并可相对于横向支架(32)实现水平方向和竖直方向上的移动,砝码夹爪(40)固定于竖直支架(33)的底部。
5.根据权利要求1或3所述的利用码垛运载机器人辅助电梯载荷检测的方法,其特征在于:所述支撑部(34)为分列于砝码承载平台(20)两侧的升降台,升降台使得纵向支架(31)能在竖直方向上移动。
6.根据权利要求4所述的利用码垛运载机器人辅助电梯载荷检测的方法,其特征在于:所述纵向支架(31)上设置有定位滑块(50),横向支架(32)通过定位滑块(50)与纵向支架(31)活动连接;所述横向支架(32)上设置有定位滑块(50),竖直支架(33)通过定位滑块(50)与横向支架(32)活动连接。
7.根据权利要求6所述的利用码垛运载机器人辅助电梯载荷检测的方法,其特征在于:所述定位滑块(50)在其相对的两个面上分别设置有用于与纵向支架(31)、或横向支架(32)、或竖直支架(33)连接的卡口(51)。
8.根据权利要求4所述的利用码垛运载机器人辅助电梯载荷检测的方法,其特征在于:所述横向支架(32)在其一端设置有滑动电机(60),所述竖直支架(33)在其顶端设置有升降电机(70)。
9.根据权利要求1或3所述的利用码垛运载机器人辅助电梯载荷检测的方法,其特征在于:所述支撑部(34)在其上部的侧面设置有加强肋(36)。
10.根据权利要求1或3所述的利用码垛运载机器人辅助电梯载荷检测的方法,其特征在于:所述砝码承载平台(20)上设置有用于对砝码(80)限位的凸起部(21)。
技术总结
本发明涉及一种利用码垛运载机器人辅助电梯载荷检测的方法,包括如下步骤,S1、码垛运载机器人携砝码进入电梯仓,其砝码承载平台(20)除在侧边为直角坐标滑块模组设置支撑部(34)外仅作为配重堆放区使用,支撑部(34)为移动支撑部使得直角坐标滑块模可水平移动,直角坐标滑块模的一端可朝砝码承载平台(20)之外的空间延伸;S2、直角坐标滑块模组按需把砝码(80)移出砝码承载平台(20)后置于电梯仓内;S3、码垛运载机器人驶离电梯仓,进行一次电梯载荷检测;S4、重复步骤S2、S3;S5、直角坐标滑块模组把电梯仓内的砝码(80)移回砝码承载平台(20)。本发明采用相对简单的结构实现了砝码运载量的增加,使其可满足五级试验载荷需求。
技术研发人员:张锋,李兵,宋佳欣,李晨晨,韩慧婷,林威,魏玉兰,张清珠
受保护的技术使用者:湖州师范学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!