姿态调整装置及搬运设备的制作方法
本发明涉及仓储物流,尤其是涉及一种姿态调整装置及搬运设备。
背景技术:
1、对于普通搬运设备如叉车、堆垛机、移动机器人等,传动结构、控制方式和行走轮结构等本身的结构特点和工作方式,决定了其在高精度定位方面存在固有的局限性。因素,搬运设备行走方向的精度只能控制在±3mm左右;同时,货架自身的安装角度偏差可达到±3°,并且货架的每个库位的角度偏差又不一样,这些因素会导致搬运设备在存取货部件存取料箱的时候容易与库位在定位上存在较大的偏差,进而影响搬运设备动作的可靠性。
2、比如在新能源行业电芯烘烤工艺的自动化存取中,对于堆垛机而言,行走方向的精度要求在±1mm以内,对货架每个库位的角度偏差补偿±1°以内。现有技术中,针对电芯在高温环境内实现自动化立体存取的解决方案为六轴机械手加机械手输送轨道,可以实现高精度的抓取作业,且容器在储位上的歪斜对机械手无影响,从而可以弥补了普通堆垛机定位精度不足问题;但是机械手设备的作业高度存在限制,通常只能应对3.5m高度空间内的自动化存取,而单台设备成本需要至少150-200万元人民币,因此成本高昂,性价比不高。
技术实现思路
1、针对现有技术不足,本发明提供了一种可对空间位置做精确补偿调节的姿态调整装置,以及包括该姿态调整装置的搬运设备,以解决现有搬运设备移动定位精度不足、机械手替代方案成本较高的问题。
2、本发明解决上述技术问题所采用的技术方案为:
3、姿态调整装置,包括角度调整机构和直线调整机构,所述角度调整机构和所述直线调整机构中的任意一个与待调整姿态对象连接,并以另一个的活动部位作为安装基础。
4、进一步地,所述角度调整机构包括活动承载件、固定件和第一驱动件,活动承载件旋转安装在固定件上,第一驱动件的动力输出端所在位置与活动承载件的旋转中心错开;第一驱动件与活动承载件传动配合,驱动活动承载件绕着自身旋转中心调整角度。
5、进一步地,所述活动承载件上设有齿条,齿条为弧形结构,且弧形结构对应的圆心与活动承载件的旋转中心重合;第一驱动件的动力输出端通过齿轮与齿条啮合。
6、进一步地,所述角度调整机构还包括转动机构,转动机构包括设置于固定件上的圆弧形滑轨,以及设置于活动承载件上的滑块;滑块滑动安装在圆弧形滑轨上。
7、进一步地,多个所述滑块关于活动承载件的旋转中心中心对称或轴对称分布。
8、进一步地,所述角度调整机构还包括第一感应限定机构,第一感应限定机构设置于滑块的原点位置以及位移极限位置,第一感应限定机构通过传感器感应滑块的位置,并通过活动的阻挡件限制滑块的移动。
9、进一步地,所述直线调整机构包括第二驱动件和直线移动件,直线移动件用于连接角度调整机构或待调整姿态对象,第二驱动件驱动直线移动件沿直线往复移动。
10、进一步地,所述直线调整机构还包括第二感应限定机构,第二感应限定机构设置于直线移动件的原点位置以及位移极限位置,第二感应限定机构通过传感器感应直线移动件的位置,并通过活动的阻挡件限制直线移动件的移动。
11、进一步地,所述的姿态调整装置还包括视觉定位模块,用于采集和处理环境参数,视觉定位模块与角度调整机构和直线调整机构控制连接。
12、进一步地,所述角度调整机构的调整轨迹所在平面与所述直线调整机构的调整轨迹所在平面平行。
13、进一步地,所述角度调整机构和所述直线调整机构叠放设置。
14、本发明同时提供的一种搬运设备,其包括所述的姿态调整装置、安装基体以及存取货部件,存取货部件为所述的待调整姿态对象,姿态调整装置安装于安装基体和存取货部件之间,对应调整存取货部件相对于安装基体的姿态。
15、与现有技术相比,本发明具备的优点为:
16、本申请所述的姿态调整装置包括角度调整机构和直线调整机构,所述角度调整机构和所述直线调整机构中的任意一个与待调整姿态对象连接,并以另一个的活动部位作为安装基础,通过旋转和直线位移相互配合的补偿动作,提高了待调整姿态对象的空间位置精度;所述的搬运设备在普通搬运设备的基础上加上所述姿态调整装置,克服了现有搬运设备定位精度不足的问题,通过姿态调整装置对存取货部件的补偿调节,适应高精度存取工艺的要求;姿态调整装置可基于原先老旧设备进行设备升级改造,安装维护方便,且相较于现有的六轴机械手加机械手输送轨道设备方案可大幅度节约成本。
技术特征:
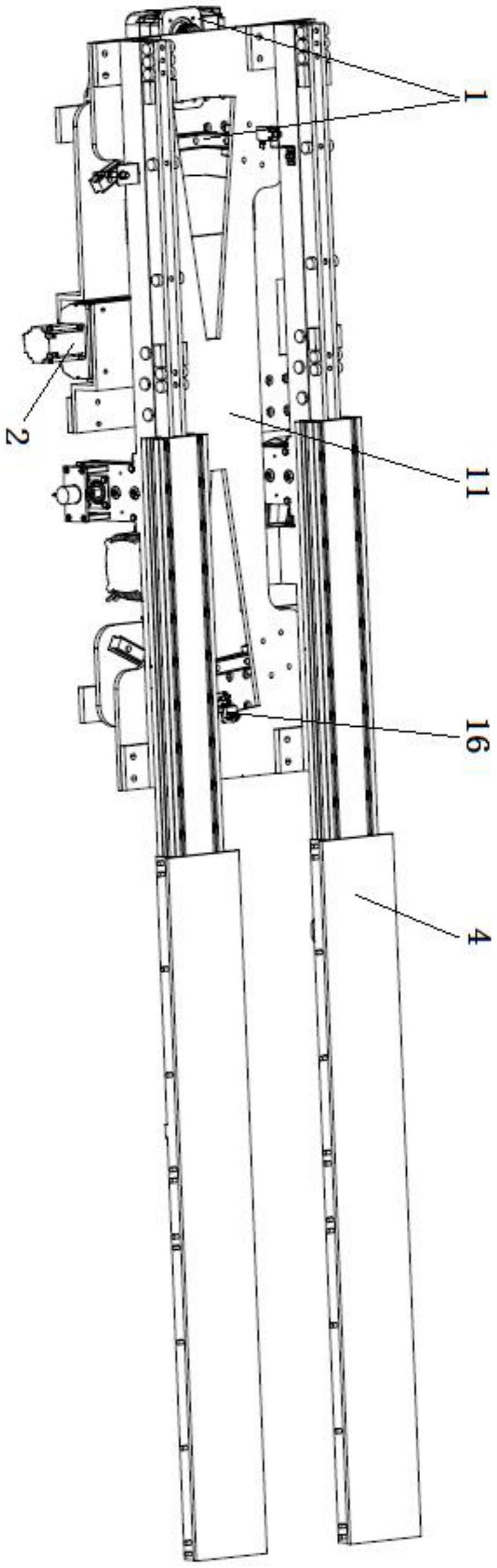
1.姿态调整装置,其特征在于:包括角度调整机构(1)和直线调整机构(2),所述角度调整机构(1)和所述直线调整机构(2)中的任意一个与待调整姿态对象连接,并以另一个的活动部位作为安装基础。
2.根据权利要求1所述的姿态调整装置,其特征在于:所述角度调整机构(1)包括活动承载件(11)、固定件(12)和第一驱动件(13),活动承载件(11)旋转安装在固定件(12)上,第一驱动件(13)的动力输出端所在位置与活动承载件(11)的旋转中心错开;第一驱动件(13)与活动承载件(11)传动配合,驱动活动承载件(11)绕着自身旋转中心调整角度。
3.根据权利要求2所述的姿态调整装置,其特征在于:所述活动承载件(11)上设有齿条(15),齿条(15)为弧形结构,且弧形结构对应的圆心与活动承载件(11)的旋转中心重合;第一驱动件(13)的动力输出端通过齿轮与齿条(15)啮合。
4.根据权利要求2所述的姿态调整装置,其特征在于:所述角度调整机构(1)还包括转动机构(14),转动机构(14)包括设置于固定件(12)上的圆弧形滑轨(141),以及设置于活动承载件(11)上的滑块(142);滑块(142)滑动安装在圆弧形滑轨(141)上。
5.根据权利要求4所述的姿态调整装置,其特征在于:多个所述滑块(142)关于活动承载件(11)的旋转中心对称分布。
6.根据权利要求4所述的姿态调整装置,其特征在于:所述角度调整机构(1)还包括第一感应限定机构(16),第一感应限定机构(16)设置于滑块(142)的原点位置以及位移极限位置,第一感应限定机构(16)通过传感器感应滑块(142)的位置,并通过活动的阻挡件限制滑块(142)的移动。
7.根据权利要求1所述的姿态调整装置,其特征在于:所述直线调整机构(2)包括第二驱动件(21)和直线移动件(22),直线移动件(22)用于连接角度调整机构(1)或待调整姿态对象,第二驱动件(21)驱动直线移动件(22)沿直线往复移动。
8.根据权利要求6所述的姿态调整装置,其特征在于:所述直线调整机构(2)还包括第二感应限定机构(23),第二感应限定机构(23)设置于直线移动件(22)的原点位置以及位移极限位置,第二感应限定机构(23)通过传感器感应直线移动件(22)的位置,并通过活动的阻挡件限制直线移动件(22)的移动。
9.根据权利要求1所述的姿态调整装置,其特征在于:还包括视觉定位模块,用于采集和处理环境参数,视觉定位模块与角度调整机构(1)和直线调整机构(2)控制连接。
10.根据权利要求1所述的姿态调整装置,其特征在于:所述角度调整机构(1)的调整轨迹所在平面与所述直线调整机构(2)的调整轨迹所在平面平行。
11.根据权利要求1所述的姿态调整装置,其特征在于:所述角度调整机构(1)和所述直线调整机构(2)叠放设置。
12.一种搬运设备,其特征在于:包括权利要求1-11中任一项所述的姿态调整装置、安装基体(3)以及存取货部件(4),存取货部件(4)为待调整姿态对象,姿态调整装置安装于安装基体(3)和存取货部件(4)之间,对应调整存取货部件(4)相对于安装基体(3)的姿态。
技术总结
本发明提供了一种姿态调整装置,其包括角度调整机构和直线调整机构,所述角度调整机构和所述直线调整机构中的任意一个与待调整姿态对象连接,并以另一个的活动部位作为安装基础,实现对待调整姿态对象空间位置的精确补偿调节;本发明同时提供了一种搬运设备,其包括所述的姿态调整装置、安装基体以及存取货部件,存取货部件为待调整姿态对象,姿态调整装置安装于安装基体和存取货部件之间,对应调整存取货部件相对于安装基体的姿态,能克服搬运设备移动定位精度不足的问题。
技术研发人员:沈鹭,杨艳,谷春光
受保护的技术使用者:深圳凯乐仕捷创佳科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!