活动支腿变位系统、活动支腿变位方法和起重机生产线与流程
本发明涉及工程机械生产,具体地,涉及一种活动支腿变位系统、活动支腿变位方法和起重机生产线。
背景技术:
1、汽车起重机的活动支腿在涂装时一般竖直吊挂以节省占地面积,且便于进行处理喷淋的沥水、抛丸后的丸料清理等作业工序。而活动支腿在涂装前的焊接工序中需要水平摆置,因此在焊接工序和涂装工序衔接时,目前需要采用吊装设备先连接水平摆置状态下的活动支腿的一端,再逐渐升高吊装设备以将活动支腿吊起,反之,在涂装完成后,需要逐渐下降吊装设备,使活动支腿重新处于水平摆置状态。然而在实际操作时发现,在吊装设备的升降过程中,活动支腿容易出现猛烈晃动的情况,存在较大的吊钩脱钩、支腿磕碰等隐患,且对吊装设备形成较大冲击,影响其使用寿命。
技术实现思路
1、针对现有技术的上述至少一种缺陷或不足,本发明提供了一种活动支腿变位系统、活动支腿变位方法和起重机生产线,能够防止活动支腿在变位过程中晃动,以达到提高生产安全性、降低工件和生产设备受损风险和降低工人劳动强度等目的。
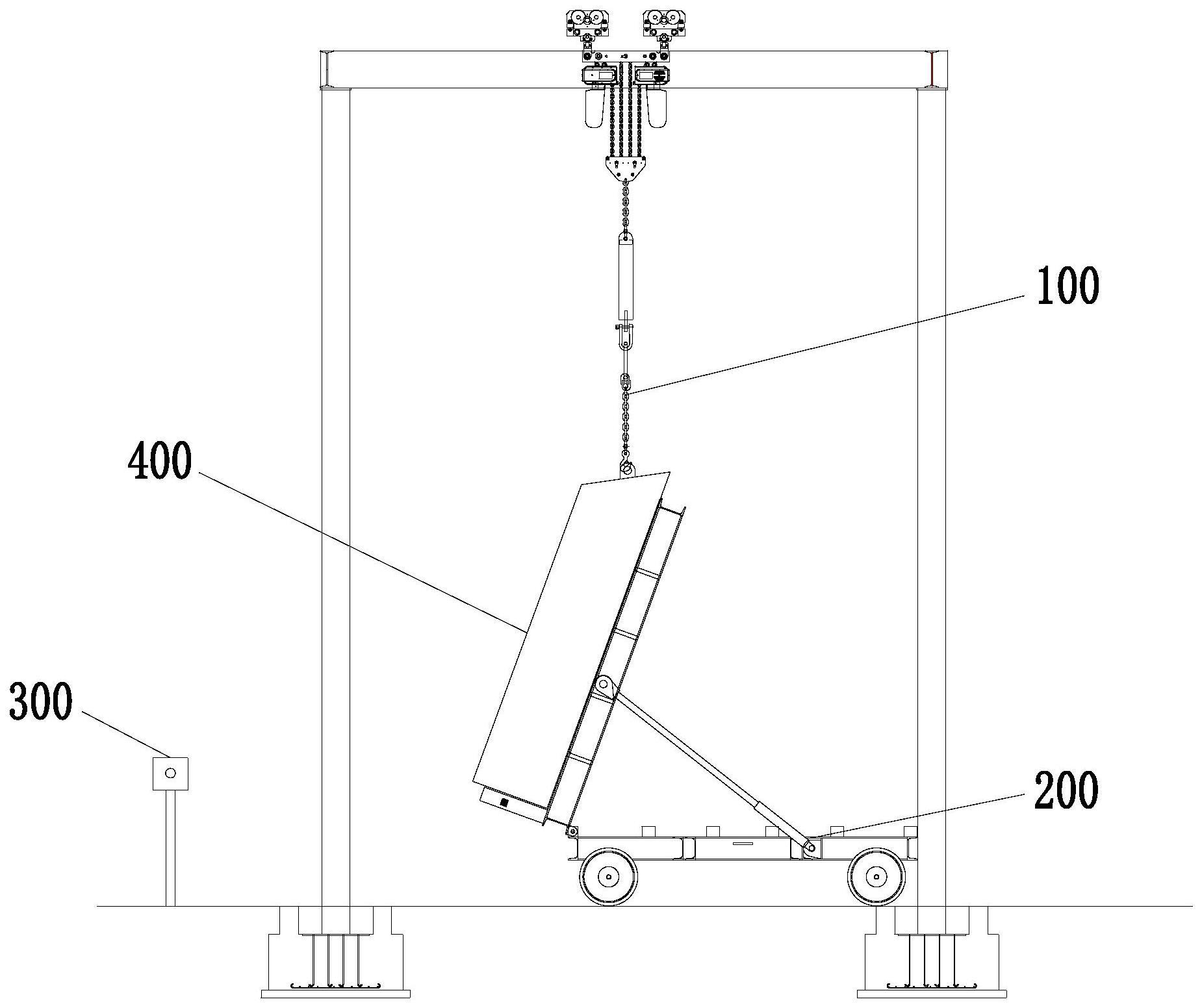
2、为实现上述目的,本发明第一方面提供了一种活动支腿变位系统,其包括:
3、吊装设备,包括用于与活动支腿的一端连接的吊具和用于驱动所述吊具升降移动的吊具升降机构;和
4、辅助支撑设备,包括用于支撑所述活动支腿的支撑台和用于驱动所述支撑台翻转的翻转机构;
5、通过所述吊具的升降移动,所述活动支腿能够在水平摆置状态和竖直吊挂状态之间变位,所述支撑台能够通过翻转以保持对变位过程中的所述活动支腿进行支撑。
6、可选地,所述辅助支撑设备还包括地面行走机构,所述支撑台的一端枢转连接于所述地面行走机构,所述翻转机构设置在所述支撑台和所述地面行走机构之间。
7、可选地,所述活动支腿变位系统还包括:
8、控制器,分别与所述辅助支撑设备和所述吊装设备通信,且配置为能够在所述活动支腿的变位过程中根据预设程序协同调节所述吊具的升降动作、所述支撑台的翻转动作和所述地面行走机构的行走动作,以使得所述支撑台保持对所述活动支腿进行支撑。
9、可选地,所述辅助支撑设备上设有预存所述活动支腿的支腿型号信息的识别码,所述活动支腿变位系统还包括用于识别所述识别码中的所述支腿型号信息的支腿型号识别设备,所述控制器与所述支腿型号识别设备通信且配置为能够根据所述支腿型号信息生成所述预设程序。
10、可选地,所述活动支腿变位系统还包括用于识别所述活动支腿上用于与所述吊具连接的支腿吊装部位的吊装部位识别设备,所述控制器与所述吊装部位识别设备通信且配置为能够根据所述支腿吊装部位控制所述吊装设备驱动所述吊具自动连接所述支腿吊装部位。
11、可选地,所述翻转机构包括能够形成线性伸缩动作的线性伸缩装置,所述线性伸缩装置的两端分别连接所述地面行走机构和所述支撑台。
12、可选地,所述支撑台枢转连接于所述地面行走机构的一端设有用于支撑所述活动支腿的端部的支撑台端板。
13、可选地,所述支撑台上设有用于防止所述活动支腿与所述支撑台直接碰撞的防护软垫。
14、可选地,所述吊装设备还包括用于驱动所述吊具平移的吊具平移机构。
15、本发明第二方面提供了一种起重机生产线,其包括上述的活动支腿变位系统。
16、本发明第三方面提供了一种活动支腿变位方法,其借助上述的活动支腿变位系统执行,并包括:
17、由所述控制器根据所述预设程序驱动所述吊装设备动作,以使得支撑在所述支撑台上的所述活动支腿变位;
18、由所述控制器根据所述预设程序驱动所述地面行走机构以匹配于所述吊具的升降速度和升降方向的行走速度和行走方向行走,以及驱动所述翻转机构带动所述支撑台以匹配于所述升降速度和所述升降方向的翻转速度和翻转角度翻转。
19、可选地,所述活动支腿变位方法包括:
20、在所述活动支腿开始变位之前,通过与所述控制器通信的支腿型号识别设备识别出支撑在所述支撑台上的所述活动支腿的支腿型号信息;
21、由所述控制器根据从所述支腿型号识别设备接收到的所述支腿型号信息生成所述预设程序。
22、通过采用本发明的技术方案,在活动支腿由水平摆置状态向竖直吊挂状态变位或从竖直吊挂状态向水平摆置状态变位的过程中,支撑台由于能够翻转,可始终保持对活动支腿的稳定支撑,而无须人工扶持,避免活动支腿在变位时晃动,有效防止活动支腿脱离吊具、磕碰支撑台或对吊装设备形成猛烈冲击,从而可降低工人劳动强度,提高生产安全性,降低工件、吊装设备和支撑台等受损的风险。
23、本发明的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种活动支腿变位系统,其特征在于,所述活动支腿变位系统包括:
2.根据权利要求1所述的活动支腿变位系统,其特征在于,所述辅助支撑设备(200)还包括地面行走机构(202),所述支撑台(201)的一端枢转连接于所述地面行走机构(202),所述翻转机构设置在所述支撑台(201)和所述地面行走机构(202)之间。
3.根据权利要求2所述的活动支腿变位系统,其特征在于,所述活动支腿变位系统还包括:
4.根据权利要求3所述的活动支腿变位系统,其特征在于,所述辅助支撑设备(200)上设有预存所述活动支腿(400)的支腿型号信息的识别码,所述活动支腿变位系统还包括用于识别所述识别码中的所述支腿型号信息的支腿型号识别设备(300),所述控制器与所述支腿型号识别设备(300)通信且配置为能够根据所述支腿型号信息生成所述预设程序。
5.根据权利要求3所述的活动支腿变位系统,其特征在于,所述活动支腿变位系统还包括用于识别所述活动支腿(400)上用于与所述吊具连接的支腿吊装部位(401)的吊装部位识别设备,所述控制器与所述吊装部位识别设备通信且配置为能够根据所述支腿吊装部位(401)控制所述吊装设备(100)驱动所述吊具自动连接所述支腿吊装部位(401)。
6.根据权利要求2所述的活动支腿变位系统,其特征在于,所述翻转机构包括能够形成线性伸缩动作的线性伸缩装置(203),所述线性伸缩装置(203)的两端分别连接所述地面行走机构(202)和所述支撑台(201)。
7.根据权利要求2所述的活动支腿变位系统,其特征在于,所述支撑台(201)枢转连接于所述地面行走机构(202)的一端设有用于支撑所述活动支腿(400)的端部的支撑台端板(201a)。
8.根据权利要求1所述的活动支腿变位系统,其特征在于,所述支撑台(201)上设有用于防止所述活动支腿(400)与所述支撑台(201)直接碰撞的防护软垫。
9.根据权利要求1所述的活动支腿变位系统,其特征在于,所述吊装设备(100)还包括用于驱动所述吊具平移的吊具平移机构。
10.一种起重机生产线,其特征在于,所述起重机生产线包括根据权利要求1至9中任意一项所述的活动支腿变位系统。
11.一种活动支腿变位方法,其特征在于,所述活动支腿变位方法借助根据权利要求3所述的活动支腿变位系统执行,并包括:
12.根据权利要求11所述的活动支腿变位方法,其特征在于,所述活动支腿变位方法包括:
技术总结
本发明属于工程机械生产领域,公开了一种活动支腿变位系统、活动支腿变位方法和起重机生产线,活动支腿变位系统包括:吊装设备,包括用于与活动支腿的一端连接的吊具和用于驱动所述吊具升降移动的吊具升降机构;和辅助支撑设备,包括用于支撑所述活动支腿的支撑台和用于驱动所述支撑台翻转的翻转机构;通过所述吊具的升降移动,所述活动支腿能够在水平摆置状态和竖直吊挂状态之间变位,所述支撑台能够通过翻转以保持对变位过程中的所述活动支腿进行支撑。可见,本发明能够防止活动支腿在变位过程中晃动,具有提高生产安全性、降低工件和生产设备受损风险和降低工人劳动强度等优点。
技术研发人员:唐华明,谭正秋,范安平,李忠夫,刘玮
受保护的技术使用者:中联重科股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!