一种机器人乘梯方法、装置、介质以及电子设备与流程
本申请涉及机器人,尤其涉及一种机器人乘梯方法、装置、介质以及电子设备。
背景技术:
1、随着人工智能技术的发展,机器人广泛应用于各个行业,节约了大量人力成本。在某些服务场所,可能会需要机器人进行跨楼层作业,进行自主乘梯。在同一楼宇中,往往会存在多个机器人同时乘梯的需求。
2、相关技术中,一般采用占用排队的方式控制机器人乘梯,即仅在当前机器人完成乘梯任务并释放电梯占用状态时,其他机器人才能进行呼梯。在当前机器人的乘梯任务未结束时,其他机器人由于无法知晓当前机器人何时会释放电梯占用状态,只能以设定的时间间隔轮询电梯是否空闲,当电梯物联系统反馈电梯空闲状态后,才能获得电梯使用权限。机器人的乘梯效率低下。
技术实现思路
1、本申请提供了一种机器人乘梯方法、装置、介质以及电子设备,可适用于机器人进行跨楼层作业的情况,可以达到提高乘梯效率的目的。
2、根据本申请的第一方面,提供了机器人乘梯方法,所述方法包括:
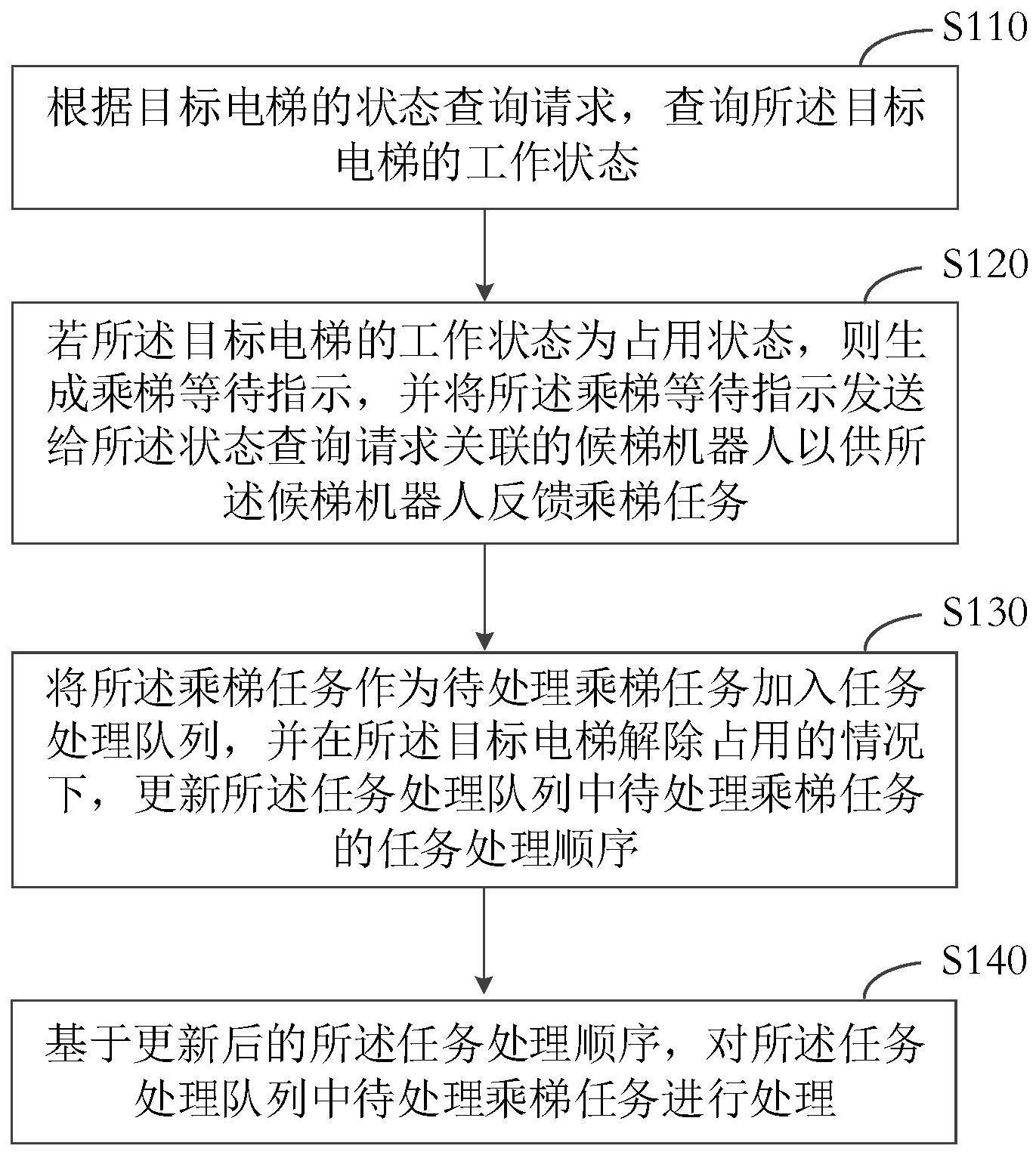
3、根据目标电梯的状态查询请求,查询所述目标电梯的工作状态;
4、若所述目标电梯的工作状态为占用状态,则生成乘梯等待指示,并将所述乘梯等待指示发送给所述状态查询请求关联的候梯机器人以供所述候梯机器人反馈乘梯任务;
5、将所述乘梯任务作为待处理乘梯任务加入任务处理队列,并在所述目标电梯解除占用的情况下,更新所述任务处理队列中待处理乘梯任务的任务处理顺序;
6、基于更新后的所述任务处理顺序,对所述任务处理队列中待处理乘梯任务进行处理。
7、根据本申请的第二方面,提供了机器人乘梯装置,所述装置包括:
8、工作状态查询模块,用于根据目标电梯的状态查询请求,查询所述目标电梯的工作状态;
9、等待指示发送模块,用于若所述目标电梯的工作状态为占用状态,则生成乘梯等待指示,并将所述乘梯等待指示发送给所述状态查询请求关联的候梯机器人以供所述候梯机器人反馈乘梯任务;
10、处理顺序更新模块,用于将所述乘梯任务作为待处理乘梯任务加入任务处理队列,并在所述目标电梯解除占用的情况下,更新所述任务处理队列中待处理乘梯任务的任务处理顺序;
11、乘梯任务处理模块,用于基于更新后的所述任务处理顺序,对所述任务处理队列中待处理乘梯任务进行处理。
12、根据本发明的第三方面,本申请实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本申请实施例所述的机器人乘梯方法。
13、根据本发明的第四方面,本申请实施例提供了一种电子设备,包括存储器,处理器及存储在存储器上并可在处理器运行的计算机程序,所述处理器执行所述计算机程序时实现如本申请实施例所述的机器人乘梯方法。
14、本申请技术方案通过在电梯物联系统中设置任务处理队列,在目标电梯的工作状态为占用状态的情况下,将候梯机器人反馈的乘梯任务作为待处理乘梯任务加入任务处理队列。使得在目标电梯的工作状态为占用状态的情况下,候梯机器人依旧可以进行呼梯,通过电梯物联系统在目标电梯解除占用的情况下,更新任务处理队列中待处理乘梯任务的任务处理顺序,基于更新后的任务处理顺序,对任务处理队列中的待处理乘梯任务进行处理,实现了电梯物联系统对乘梯任务的统一管理,由电梯物联系统基于任务处理顺序调度目标电梯,并通知相应的候梯机器人进行乘梯。候梯机器人不再需要不断轮询电梯的工作状态,不会因无法知晓目标电梯何时空闲,没有及时抢占电梯的使用权,导致目标电梯被唤离的情况发生,有效提高了机器人的乘梯效率。
15、应当理解,本部分所描述的内容并非旨在标识本申请的实施例的关键或重要特征,也不用于限制本申请的范围。本申请的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种机器人乘梯方法,其特征在于,应用于电梯物联系统,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述更新所述任务处理队列中待处理乘梯任务的任务处理顺序,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述候梯机器人的预期移动方向和预期出发楼层,以及所述目标电梯的当前所在楼层和当前运行方向,对所述任务处理队列中所述待处理乘梯任务的任务处理顺序进行更新,包括:
4.根据权利要求1所述的方法,其特征在于,所述更新所述任务处理队列中待处理乘梯任务的任务处理顺序,包括:
5.根据权利要求4所述的方法,其特征在于,所述基于所述待处理乘梯任务的任务属性,对所述任务处理队列中所述待处理乘梯任务的任务处理顺序进行更新,包括:
6.根据权利要求4所述的方法,其特征在于,所述基于所述待处理乘梯任务的任务属性,对所述任务处理队列中所述待处理乘梯任务的任务处理顺序进行更新,包括:
7.根据权利要求1所述的方法,其特征在于,所述基于更新后的所述任务处理顺序,对所述任务处理队列中待处理乘梯任务进行处理,包括:
8.一种机器人乘梯装置,其特征在于,配置于电梯物联系统,所述装置包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一项所述的机器人乘梯方法。
10.一种电子设备,包括存储器,处理器及存储在存储器上并可在处理器运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-7中任一项所述的机器人乘梯方法。
技术总结
本申请实施例公开了一种机器人乘梯方法、装置、介质以及电子设备。所述方法包括:根据目标电梯的状态查询请求,查询所述目标电梯的工作状态;若所述目标电梯的工作状态为占用状态,则生成乘梯等待指示,并将所述乘梯等待指示发送给所述状态查询请求关联的候梯机器人以供所述候梯机器人反馈乘梯任务;将所述乘梯任务作为待处理乘梯任务加入任务处理队列,并在所述目标电梯解除占用的情况下,更新所述任务处理队列中待处理乘梯任务的任务处理顺序;基于更新后的所述任务处理顺序,对所述任务处理队列中待处理乘梯任务进行处理。本申请技术方案可以提高机器人的乘梯效率。
技术研发人员:白秋荻,李通,何林,郭建峰,蒋东斌
受保护的技术使用者:上海擎朗智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!