一种农作物机械化自动控制运送装卸系统及方法
本发明涉及一种农作物机械化自动控制运送装卸系统及方法,属于农业机械。
背景技术:
1、一些菌类农场品种植过程中,种子大部分寄生于树干中,而在人工养殖过程中,需要将含有菌类植物孢子的树干掩埋到种植田中人工培养。随着国家政策对土地种植的要求,以及市场上对农作物的需求,为了提高农场品的供应,需要对灵芝等菌类作物进行大棚式种植,在种植过程中,灵芝产品的种植是通过将灵芝孢子种植在适合生长的树干中,后续将含有孢子的一截树干掩埋于大棚式种植田中,合理密植,得到一块块种植田。在批量种植过程中,原料的搬运需要消耗大量人力操作。同时种植效率低,搬运过程需要铺设运送道路,占据了一定量的种植面积。
2、为了解决这一问题,需要设计一种合理的运送系统,在运送过程中,减少所需人力,并通过机械化作业提高种植效率。同时,这一装置也可以运用于各种合适的场合,如大棚、菜园、茶园等可以设置该装置。
3、因此,研发一种可应用于大量较重的产品原料运送及装卸系统装置十分必要。
技术实现思路
1、为了克服现有研究的不足,本发明提供了一种应用于运送重型种植原料的机械化自动控制机构及其装卸方法。
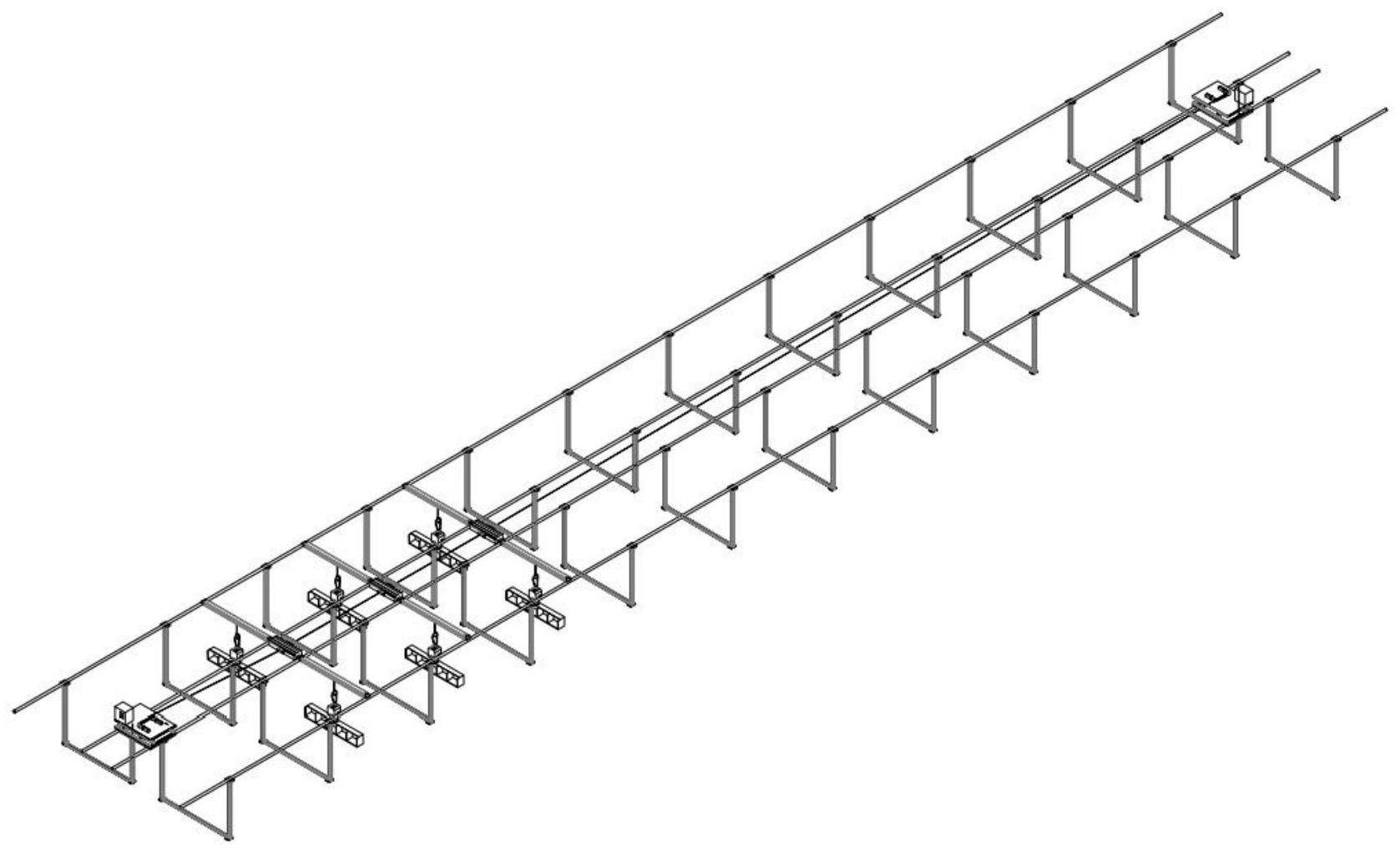
2、一种农作物机械化自动控制运送装卸系统,包括支撑装置,安装在所述支撑装置上且控制行进装置的正反运动的主电机平台和辅电机平台,安装在所述主电机平台和辅电机平台之间的行进装置,安装在所述行进装置下的装卸装置;
3、所述辅电机平台与主电机平台结构相同,分别位于运送装卸系统的两端,包括主平衡装置和安装在所述主平衡装置上的第一驱动装置和第二驱动装置,所述辅电机平台与主电机平台通过绳索相连;
4、所述行进装置安装在绳索上,包括行进装置本体,安装在所述行进装置本体上的连接板,安装在所述连接板上且用于连接绳索的铰扣和安装在所述行进装置本体上的异形连接板;所述行进装置之间通过绳索相连,两端的行进装置分别通过绳索连接在所述主电机平台和辅电机平台的电机滚轮上,
5、行进装置包括两根固定滑轨作为行进路径,两根滑轨的距离一定,根据实际位置可进行调整,行进机构两端连接滚珠滑块限制在滑杆上,再与装卸机构相连接,相邻的行进机构通过挂钩绳索连接,整个运送系统共包括3个行进机构,在主电机平台的电机驱动下,通过绳索进行动力传递。
6、所述装卸装置包括横梁,设置在所述横梁一端且与所述异形连接板相连的滚珠滑块和挂设在所述横梁上的自动脱钩器,所述自动脱钩器通过连接结与装载箱相连;所述自动脱钩器的钩子可开合且与连接结进行螺柱固定实现装载箱的倾斜且不脱落。
7、所述支撑装置包括底架,通过固定槽与所述底架相连的支承脚架和安装在所述支承脚架上的滑杆,所述支承脚架开设有连接槽与所述滑杆连接。
8、所述第一驱动装置包括主平台滚轮电机和第一减速机,第二驱动装置包括辅平台滚轮电机和第二减速机,所述主平衡装置包括有一主平台行进机构,所述主平台行进机构包括一组齿轮和齿条,齿轮与主平台行进电机通过键连接。主平台滚轮电机、辅平台滚轮电机的输出轴与第一减速机、第二减速机连接,驱动滚轮将绳索收紧或松放。
9、所述主平衡装置包括上支撑板和下支撑板,所述上支撑板和下支撑板之间安装有平衡架。
10、一种农作物机械化自动控制运送装卸的方法,包括以下步骤:
11、步骤一、根据农作物运送位置,将行进装置带动装卸装置停靠在起始位,当装卸装置中未放置农作物时,自动脱钩器处于闭合状态,载物箱处于水平位置,自动脱钩器挂钩部位未处于闭合状态,需要遥控控制脱钩器闭合,待载物箱装载农作物,由于未装载时整个行进装置和装卸装置的重心位于行进装置的中心线上,需要在装载原料时,两侧同时装载;
12、步骤二、在农作物装载完毕后,根据农作物所在种植田的特点,每个装卸装置之间需要保持固定距离,在外侧行进装置与相邻行进装置达到一定距离时,两个行进装置之间的连接绳达到紧绷状态,同理,后续行进装置进行同时运动;
13、步骤三,主电机平台的主平台滚轮电机、辅平台滚轮电机正转提供动力,通过绳索传递动力,带动行进装置运动,同时辅电机平台中电机反转,保证行进装置之间的连接绳保持紧绷状态;
14、步骤四、在行进装置达到种植田的指定位置时,装卸装置保持稳定状态,自动脱钩器的挂钩在控制箱下从闭合状态转变成断开状态,装载箱倾斜到一定程度,灵芝木材在重力的作用下掉落到种植田中,装卸过程完成后,挂钩恢复到闭合状态,行进装置向反方向运动,主电机平台与辅电机平台电机转动方向与原方向相反,直至行进装置回到初始位置
15、与现有技术相比,本发明的有益效果在于:
16、本发明功能上适应性强,可以适用于各种农作田,如大棚、茶园等;运输过程简单,拆卸组装方便,便于维护和检修。本发明机动性强,可以同时覆盖多个农田进行运送,相比于传统的人工定位,可以更方便得进行合理种植,在固定的轨道上移动,本发明的优化种植可以节省成本。本发明可以解放大量的运送过程中所需劳动力,较大程度上提高种植效率,同时只需操作人员简单的在农田两侧控制系统的运送速度和设备的启停,方便对整体种植情况的观察。本发明在机械化种植的基础上,采取简单的模块化控制结构,保证降低整个系统的故障率。
技术特征:
1.一种农作物机械化自动控制运送装卸系统,其特征在于:包括支撑装置,安装在所述支撑装置上且控制行进装置的正反运动的主电机平台和辅电机平台,安装在所述主电机平台和辅电机平台之间的行进装置,安装在所述行进装置下的装卸装置;
2.根据权利要求1所述的一种农作物机械化自动控制运送装卸系统,其特征在于:所述支撑装置包括底架,通过固定槽与所述底架相连的支承脚架和安装在所述支承脚架上的滑杆,所述支承脚架开设有连接槽与所述滑杆连接。
3.根据权利要求2所述的一种农作物机械化自动控制运送装卸系统,其特征在于:所述第一驱动装置包括主平台滚轮电机和第一减速机,第二驱动装置包括辅平台滚轮电机和第二减速机,所述主平衡装置包括有一主平台行进机构,所述主平台行进机构包括一组齿轮和齿条,齿轮与主平台行进电机通过键连接。
4.根据权利要求3所述的一种农作物机械化自动控制运送装卸系统,其特征在于:所述主平衡装置包括上支撑板和下支撑板,所述上支撑板和下支撑板之间安装有平衡架。
5.一种根据权利要求1-4中任一所述的一种农作物机械化自动控制运送装卸的方法,其特征在于:包括以下步骤:
技术总结
本发明涉及一种农作物机械化自动控制运送装卸系统及方法,包括支撑装置,安装在支撑装置上且控制行进装置的正反运动的主电机平台和辅电机平台,安装在主电机平台和辅电机平台之间的行进装置,安装在行进装置下的装卸装置;辅电机平台与主电机平台结构相同,分别位于运送装卸系统的两端,包括主平衡装置和安装在主平衡装置上的第一驱动装置和第二驱动装置,辅电机平台与主电机平台通过绳索相连;行进装置安装在绳索上,包括行进装置本体,安装在行进装置本体上的连接板,安装在连接板上且用于连接绳索的铰扣和安装在所述行进装置本体上的异形连接板,本发明可以适用于各种农作田,如大棚、茶园等;运输过程简单,拆卸组装方便,便于维护和检修。
技术研发人员:屈磊,陈凯,陈升,傅成松
受保护的技术使用者:杭州电子科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!