一种使用平整机器人平整车厢散料的方法及存储介质与流程
本发明涉及车厢散料平整领域,尤其一种使用平整机器人平整车厢散料的方法及存储介质。
背景技术:
1、火车厢在完成散料投放后,会出现车厢宽度方向上两边底中间高的情况。铁道部门要求车厢内部的物料应平整。目前装料工艺中常有几种解决方案。一种是用固定设置的横杠进行平煤;第二种是装料机构自身带有一定的平车功能,但会在车厢长度方向的一侧堆积大量余煤;第三种是用专用的平车机构进行平车作业。
2、以上几种装车作业方式都会造成车厢宽度方向两侧有一定空隙,车厢四角有明显缺煤,并且车厢两侧煤量分布不均,因此完成装料和平车之后,仍需要人工进行辅助作业。存在较大的安全生产风险。
技术实现思路
1、为了解决上述技术问题,本发明公开了一种使用平整机器人平整车厢散料的方法,所述方法包括:
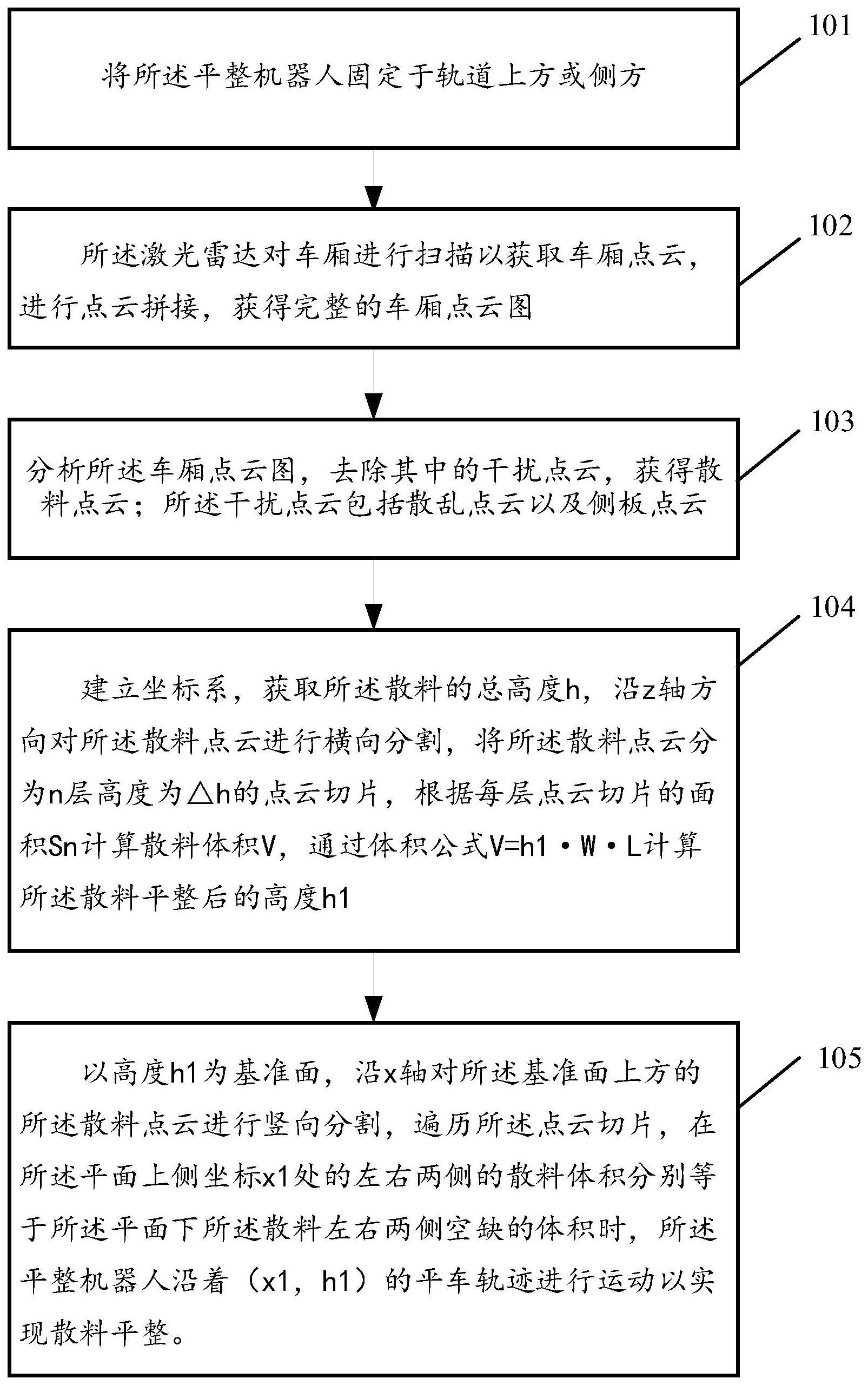
2、将所述平整机器人固定于轨道上方或侧方;
3、所述激光雷达对车厢进行扫描以获取车厢点云,进行点云拼接,获得完整的车厢点云图;
4、分析所述车厢点云图,去除其中的干扰点云,获得散料点云;所述干扰点云包括散乱点云以及侧板点云;
5、建立坐标系,获取所述散料的总高度h,沿z轴方向对所述散料点云进行横向分割,将所述散料点云分为n层高度为△h的点云切片,根据每层点云切片的面积sn计算散料体积v,通过体积公式v=h1·w·l计算所述散料平整后的高度h1,其中w为车厢宽度,l为车厢长度;
6、以高度h1为基准面,沿x轴对所述基准面上方的所述散料点云进行竖向分割,遍历所述点云切片,在所述平面上侧坐标x1处的左右两侧的散料体积分别等于所述平面下所述散料左右两侧空缺的体积时,所述平整机器人沿着(x1,h1)的平车轨迹进行运动以实现散料平整。
7、进一步的,所述平整机器人包括机械臂、平车机构以及激光雷达;所述机械臂末端安装有所述平车机构;
8、所述平车机构包括固定座、电机、平整件、减速机以及主动推板;所述平整件呈倒v型并固定在固定座下表面,所述平整件两侧设有所述主动推板,所述电机和减速机固定于所述固定座,所述电机的输出端通过所述减速机与所述主动推板相连;
9、所述激光雷达设置于所述固定座的竖直投影方向外,并通过支架与所述固定座相连接。
10、进一步的,对所述散乱点云进行去除时,还包括以下步骤:
11、设定半径d以及邻近点云数量的阈值;
12、遍历所述车厢点云图中的点,如所述点的半径d中邻近点云的数量小于所述阈值,则将所述点去除,否则则保留所述点。
13、进一步的,对所述侧板点云进行去除时,还包括以下步骤:
14、采用pointnet算法对所述车厢点云图进行分割;
15、所述pointnet算法去除所述车厢点云图中的地面点云,再对剩余部分进行包围盒且通过直通滤波处理将车厢本体点云去除,以保留所述散料点云
16、进一步的,所述pointnet算法包括分类网络以及分割网络;
17、所述分类网络包括依次相连的升维层、池化层以及聚合层;
18、所述分割网络包括降维层以及输出层。
19、进一步的,在计算所述散料体积v时,还包括以下步骤:
20、获取全部所述点云切片的面积sn;
21、通过体积公式进行所述散料体积v的计算,所述体积公式为:
22、v=△h·(s1+s2+…+sn)
23、进一步的,所述平整机器人运动时,还包括,所述平整机器人在按照所述平车轨迹进行运动时,根据所述散料的分布状态调整所述主动推板的角度。
24、进一步的,所述平整机器人运动时,还包括,当所述平车机构运动至所述车厢的端部时,所述平整件两侧的所述主动推板向靠近所述车厢端部的一侧运动。
25、进一步的,所述激光雷达对所述车厢进行扫描时,根据位移距离进行点云拼接,以获得所述车厢点云图,所述位移距离包括所述激光雷达的运动距离或所述车厢的运动距离。
26、本发明实施方式第二方面公开了一种计算机存储介质,所述计算机存储介质存储有计算机指令,所述计算机指令被调用时,用于执行本发明第一方面公开的使用平整机器人平整车厢散料的方法中的部分或全部步骤。
27、与现有技术相比,本发明实施例具有以下有益效果:
28、本发明实施例中,首先通过自动化激光雷达扫描车厢,并进行点云拼接获得车厢以及其中散料的完整车厢点云图,之后通过去除干扰点云,单独提取出散料点云,避免了阳光、雨水、车厢地面等影响,确保了机器人平整路径规划的精度。通过点云切片进行散料点云的体积计算,便捷获取平整后的散料高度h1,使得平整机器人能够根据高度h1进行散料平整作业,本发明提出有效的自动平车方法,可实现平车的自动化,降低人工劳动强度和安全风险。在平台效果上,本发明可精确感知车厢内部散料的分布状况,并且根据分布情况通过平车激光运动规划方法,计算出一次刮平的位置点和高度,使得平车效率得到较大的提高,使得刮平后散料平整和分布均匀。
技术特征:
1.一种使用平整机器人平整车厢散料的方法,包括设有激光雷达的平整机器人,其特征在于,所述方法包括:
2.根据权利要求1所述的使用平整机器人平整车厢散料的方法,其特征在于,所述平整机器人包括机械臂(1)、平车机构(2);所述机械臂(1)末端安装有所述平车机构(2);
3.根据权利要求2所述的使用平整机器人平整车厢散料的方法,其特征在于,对所述散乱点云进行去除时,还包括以下步骤:
4.根据权利要求2所述的使用平整机器人平整车厢散料的方法,其特征在于,对所述侧板点云进行去除时,还包括以下步骤:
5.根据权利要求4所述的使用平整机器人平整车厢散料的方法,其特征在于,所述pointnet算法包括分类网络以及分割网络;
6.根据权利要求2所述的使用平整机器人平整车厢散料的方法,其特征在于,在计算所述散料体积v时,还包括以下步骤:
7.根据权利要求2所述的使用平整机器人平整车厢散料的方法,其特征在于,所述平整机器人运动时,还包括,所述平整机器人在按照所述平车轨迹进行运动时,根据所述散料的分布状态调整所述主动推板的角度。
8.根据权利要求2所述的使用平整机器人平整车厢散料的方法,其特征在于,所述平整机器人运动时,还包括,当所述平车机构运动至所述车厢的端部时,所述平整件两侧的所述主动推板向靠近所述车厢端部的一侧运动。
9.根据权利要求2所述的使用平整机器人平整车厢散料的方法,其特征在于,所述激光雷达对所述车厢进行扫描时,根据位移距离进行点云拼接,以获得所述车厢点云图,所述位移距离包括所述激光雷达的运动距离或所述车厢的运动距离。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-9任一项所述的使用平整机器人平整车厢散料的方法。
技术总结
本发明公开了一种使用平整机器人平整车厢散料的方法,方法包括通过激光雷达对车厢进行扫描以获取车厢点云获得完整的车厢点云图;去除其中的干扰点云,获得散料点云;沿z轴方向对散料点云进行横向分割,计算散料体积V以及散料平整后的高度h1,以高度h1为基准面,沿x轴对基准面上方的散料点云进行竖向分割,在平面上侧坐标x1处的左右两侧的散料体积分别等于平面下散料左右两侧空缺的体积时,平整机器人沿着(x1,h1)的平车轨迹进行运动以实现散料平整。本发明通过精确感知车厢内部散料的分布状况,并且根据分布情况规划运动轨迹,计算出一次刮平的位置点和高度,使得平车效率得到较大的提高、刮平后散料平整和分布均匀。
技术研发人员:黄冠成,王志峰,罗坚铭,李威胜
受保护的技术使用者:佛山缔乐视觉科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!