绞车的排缆控制方法及装置、绞车、存储介质和电子设备与流程
本申请涉及排缆,具体而言,涉及一种绞车的排缆控制方法及装置、绞车、存储介质和电子设备。
背景技术:
1、绞车是用储缆卷筒缠绕缆绳(如钢丝绳或链条)提升或牵引重物的轻小型起重设备。绞车通过缆绳可以垂直提升、水平或倾斜拽引重物。
2、在绞车运行过程中,缆绳从储缆卷筒中放出以将其所牵引的目标设备放入目标位置,以及可以通过回收缆绳将目标设备进行召回。而在缆绳超长、复杂工况等情况下,绞车在排缆(如放缆、收缆)时可能会出现乱缆(如咬缆、背缆、空槽)、夹缆等问题。因此,为保证缆车正常排缆,绞车需要安装排缆装置。
技术实现思路
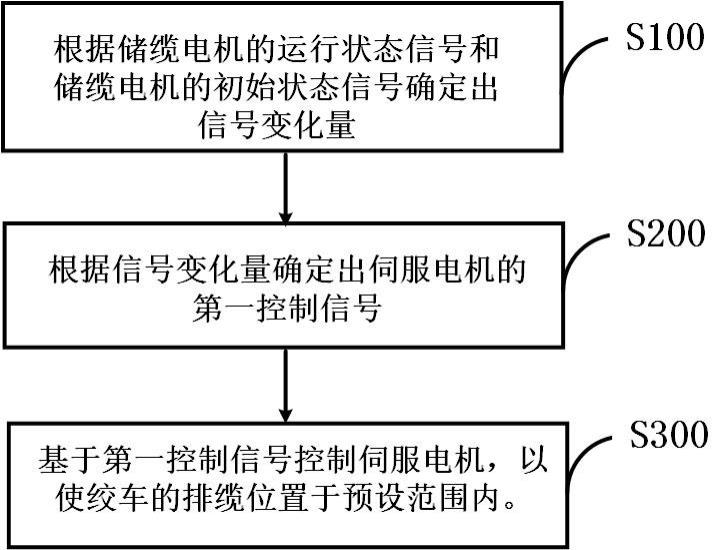
1、根据本申请的一方面,公开了一种绞车的排缆控制方法。该排缆控制方法包括:根据储缆电机的运行状态信号和储缆电机的初始状态信号确定出信号变化量;根据信号变化量确定出伺服电机的第一控制信号;基于第一控制信号控制伺服电机,以使绞车的排缆位置于预设范围内。
2、根据本申请的一些实施例,排缆控制方法还包括:获取绞车的排缆角度的角度偏差值;据角度偏差值和预设的角度目标值,确定出伺服电机的第二控制信号;排缆控制方法在根据信号变化量确定出伺服电机的第一控制信号之后还包括:基于第一控制信号和第二控制信号控制伺服电机,以使绞车的排缆位置和排缆角度于预设范围内。
3、根据本申请的一些实施例,根据信号变化量确定出伺服电机的第一控制信号为:pm=pn×d1×k2/(a×k1×d2);pn=p2- p1;其中,pm为伺服电机的第一控制信号,pn为信号变化量,p1为初始状态信号,p2为运行状态信号,d1为绞车的缆绳的直径,d2为绞车的丝杠的导程,k1为储缆电机的减速比,k2为伺服电机的减速比,a为储缆电机和伺服电机每转一圈所产生的脉冲数。
4、根据本申请的一些实施例,初始状态信号包括储缆电机运行前的起始脉冲,运行状态信号包括储缆电机运行后的时刻脉冲,第一控制信号包括伺服电机的目标脉冲。
5、根据本申请的另一方面,公开了一种排缆控制装置,该排缆控制装置包括信号确定单元和信号控制单元。信号确定单元,根据储缆电机的运行状态信号和储缆电机的初始状态信号确定出信号变化量,以及根据信号变化量确定出伺服电机的第一控制信号;信号控制单元,基于第一控制信号控制伺服电机,以使绞车的排缆位置于预设范围内。
6、根据本申请的一些实施例,排缆控制装置还包括角度检测单元,角度检测单元获取绞车的排缆角度的角度偏差值;信号确定单元根据角度偏差值和预设的角度目标值,确定出伺服电机的第二控制信号;信号控制单元基于第一控制信号和第二控制信号控制伺服电机,以使绞车的排缆位置和排缆角度于预设范围内。
7、根据本申请的一些实施例,信号控制单元根据信号变化量确定出伺服电机的第一控制信号为:pm=pn×d1×k2/(a×k1×d2);pn=p2- p1;其中,pm为伺服电机的第一控制信号,pn为信号变化量,p1为初始状态信号,p2为运行状态信号,d1为绞车的缆绳的直径,d2为绞车的丝杠的导程,k1为储缆电机的减速比,k2为伺服电机的减速比,a为储缆电机和伺服电机每转一圈所产生的脉冲数。
8、根据本申请的一些实施例,初始状态信号包括储缆电机运行前的起始脉冲,运行状态信号包括储缆电机运行后的时刻脉冲,第一控制信号包括伺服电机的目标脉冲。
9、根据本申请的又一方面,还公开了一种绞车。该绞车包括如上文所述的排缆控制装置。
10、根据本申请的又一方面,还公开了一种非易失性计算机可读存储介质。该存储介质上存储有计算机程序,该计算机程序可以实现如上文所述的排缆控制方法。
11、根据本申请的又一方面,还公开了一种电子设备。该电子设备包括一个或多个处理器、存储装置。存储装置用于存储一个或多个程序;当一个或多个程序被一个或多个处理器执行,使得一个或多个处理器实现如上文所述的排缆控制方法。
12、本申请技术方案根据储缆电机的运行状态信号和储缆电机的初始状态信号确定出信号变化量,以及根据信号变化量确定出伺服电机的第一控制信号,并基于第一控制信号控制伺服电机,以使绞车的排缆位置于预设范围内。
13、通过根据储缆电机运行前后的信号变化量,控制储缆卷筒的储缆电机与丝杠的伺服电机的同步运行,这样可以消除机械驱动方式所产生的累积误差,以及保证排缆的及时性和同步性,从而保证排缆效果。
技术特征:
1.一种绞车的排缆控制方法,其特征在于,所述绞车包括储缆电机和伺服电机,所述排缆控制方法包括:
2.根据权利要求1所述的排缆控制方法,其特征在于,所述排缆控制方法还包括:
3.根据权利要求1所述的排缆控制方法,其特征在于,所述根据所述信号变化量确定出所述伺服电机的第一控制信号为:
4.一种绞车的排缆控制装置,其特征在于,所述绞车包括储缆电机和伺服电机,所述排缆控制装置包括:
5.根据权利要求4所述的排缆控制装置,其特征在于,所述排缆控制装置还包括:
6.根据权利要求4所述的排缆控制装置,其特征在于,所述信号控制单元根据所述信号变化量确定出所述伺服电机的第一控制信号为:
7.一种绞车,其特征在于,包括如权利要求4~6中任一所述的排缆控制装置。
8.一种非易失性计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序实现如权利要求 1~3中任一所述的排缆控制方法。
9.一种电子设备,其特征在于,包括:
技术总结
本申请公开了一种绞车的排缆控制方法及装置、绞车、存储介质和电子设备。本申请涉及排缆技术领域,用于解决如何在缆绳使用超长的情况下,保证缆绳排缆的正常运行的技术问题。所述排缆控制方法包括:根据储缆电机的运行状态信号和储缆电机的初始状态信号确定出信号变化量;根据信号变化量确定出伺服电机的第一控制信号;基于第一控制信号控制伺服电机,以使绞车的排缆位置于预设范围内。本申请可以根据储缆电机运行前后的信号变化量,控制储缆卷筒的储缆电机与丝杠的伺服电机的同步运行,这样可以消除机械驱动方式所产生的累积误差,以及保证排缆的及时性和同步性,从而保证排缆效果。
技术研发人员:魏建仓,田永锋,侯明波,贺雨阁,宋丁
受保护的技术使用者:深之蓝海洋科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!