运行控制方法、装置、电子设备及存储介质与流程
本申请涉及自动化,尤其涉及一种运行控制方法、装置、电子设备及存储介质。
背景技术:
1、无人叉车作为现代工厂中重要的智能物流设备,在货物搬运、分拣、装配等方面都发挥着巨大的作用。但是,工厂的运作无法完全脱离人工的参与,在一些应用场景下,仍需要人工对货物进行打包、搬运等,因此经常存在工厂工作人员与无人叉车处于同一工作区域的人机混合场景。而现有的工厂中,在人机混合场景下工作人员和无人叉车之间存在相互干扰和接触的风险,容易导致严重的安全事故。
技术实现思路
1、本申请实施例公开了一种运行控制方法、装置、电子设备及存储介质,能够在人机混合场景下,提高无人叉车和工作人员的安全性。
2、本申请实施例公开了一种运行控制方法,所述方法包括:
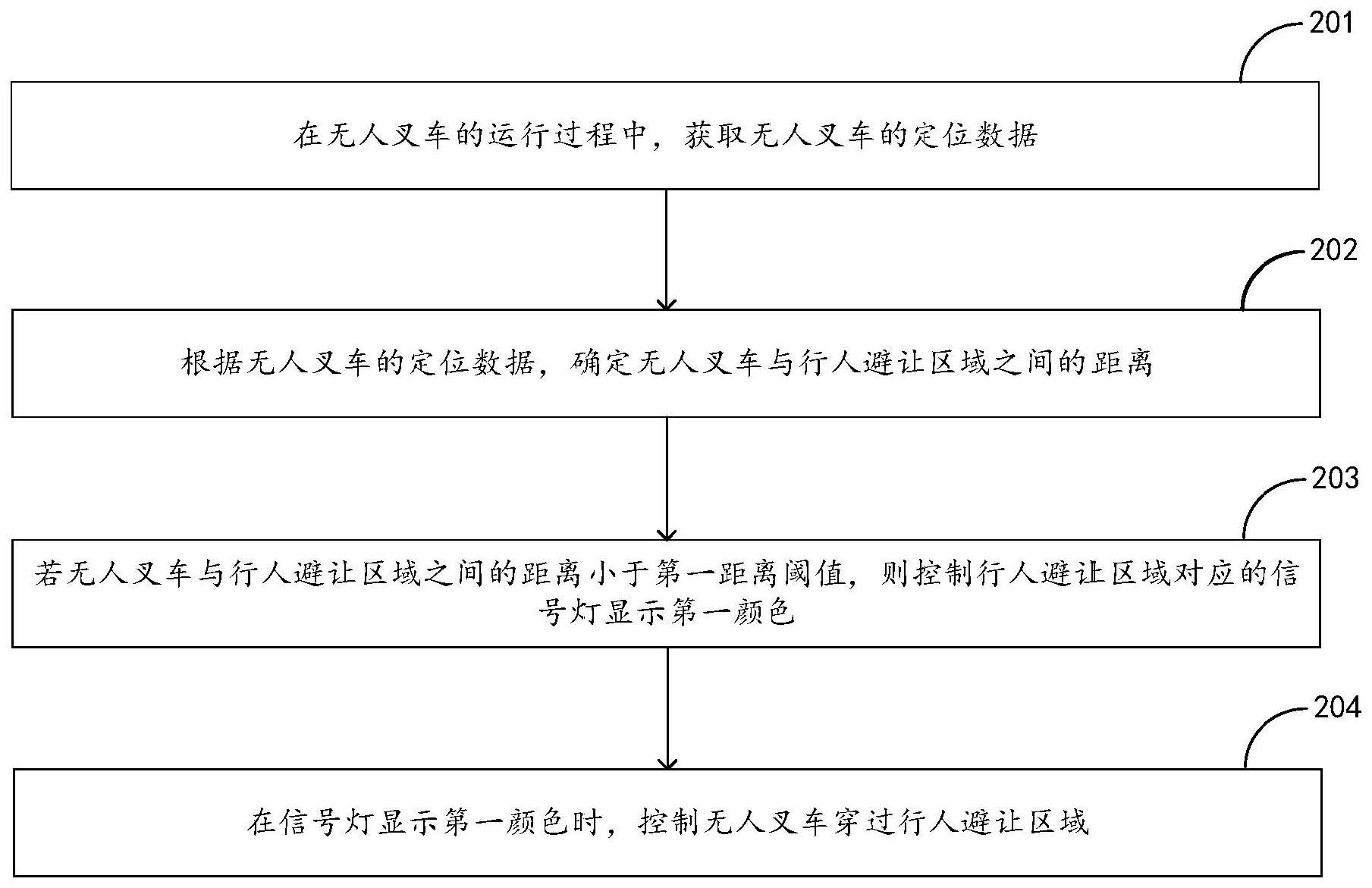
3、在无人叉车的运行过程中,获取所述无人叉车的定位数据;
4、根据所述无人叉车的定位数据,确定所述无人叉车与行人避让区域之间的距离;
5、若所述无人叉车与所述行人避让区域之间的距离小于第一距离阈值,则控制所述行人避让区域对应的信号灯显示第一颜色;所述第一颜色用于提示行人禁止经过所述行人避让区域;
6、在所述信号灯显示所述第一颜色时,控制所述无人叉车穿过所述行人避让区域。
7、在一个实施例中,所述方法还包括:
8、若所述无人叉车与所述行人避让区域之间的距离大于或等于所述第一距离阈值,则控制所述行人避让区域对应的信号灯显示第二颜色;所述第二颜色用于提示行人允许经过所述行人避让区域。
9、在一个实施例中,所述行人避让区域包括转角区域;所述无人叉车设置有感应装置以及声光报警器;所述转角区域设置有防撞标签,所述防撞标签用于与所述感应装置进行无线通信;其中:
10、所述防撞标签,用于在接收到所述无人叉车通过所述感应装置发送的无线脉冲信号时,返回响应信号;
11、所述感应装置,用于根据发送所述无线脉冲信号及接收到所述响应信号之间的时间差计算所述感应装置和所述防撞标签之间的距离;
12、所述声光报警器,用于若所述感应装置和所述防撞标签之间的距离小于第二距离阈值,则发出报警信号。
13、在一个实施例中,所述行人避让区域包括多个供行人通行的分支道路;所述行人避让区域包括至少两组信号灯,每组所述信号灯设置有多个不同朝向的单面信号灯,每组所述信号灯中所述单面信号灯的数量与所述分支道路的数量对应;所述至少两组信号灯中的各个所述单面信号灯的朝向覆盖各个所述分支道路。
14、在一个实施例中,所述无人叉车还设置有摄像头;所述在所述信号灯显示所述第一颜色时,控制所述无人叉车穿过所述行人避让区域,包括:
15、在所述信号灯显示所述第一颜色时,获取所述无人叉车通过所述摄像头采集的第一图像;所述第一图像包括所述行人避让区域;
16、若根据所述第一图像确定所述行人避让区域存在行人,则控制所述无人叉车停止,直至根据所述摄像头采集的第一图像确定所述行人避让区域不存在行人时,控制所述无人叉车穿过所述行人避让区域。
17、在一个实施例中,所述无人叉车包括货叉,所述货叉的长度超过所述无人叉车搬运的货物的长度;所述货叉的叉尖设置有防撞传感器;其中:
18、所述防撞传感器,用于检测所述无人叉车与位于所述无人叉车前方的障碍物的相对距离以及相对方向,以触发所述无人叉车若确定所述障碍物的相对距离小于第三距离阈值,则减速或者停止运动,并根据所述相对距离和所述相对方向调整所述无人叉车的位姿。
19、在一个实施例中,所述方法还包括:
20、控制所述无人叉车前往第一输送线的出口处,叉取空托盘,以及,将所述空托盘从所述第一输送线的出口处搬运至第二输送线的入口处,并前往所述第二输送线的出口处叉取对所述空托盘上料得到的满托盘,以及,将所述满托盘从所述第二输送线的出口处搬运至第三输送线的入口处;所述第一输送线用于输送空托盘;所述第二输送线用于对所述空托盘上料,以得到满托盘,并输送所述满托盘;所述第三输送线用于将所述满托盘输送至仓库。
21、本申请实施例公开了一种运行控制装置,所述运行控制装置包括:
22、获取模块,用于在无人叉车的运行过程中,获取所述无人叉车的定位数据;
23、确定模块,用于根据所述无人叉车的定位数据,确定所述无人叉车与行人避让区域之间的距离;
24、控制模块,用于若所述无人叉车与所述行人避让区域之间的距离小于第一距离阈值,则控制所述行人避让区域对应的信号灯显示第一颜色;所述第一颜色用于提示行人禁止经过所述行人避让区域;
25、所述控制模块,还用于在所述信号灯显示所述第一颜色时,控制所述无人叉车穿过所述行人避让区域。
26、本申请实施例公开了一种电子设备,包括:
27、存储有可执行程序代码的存储器;
28、与所述存储器耦合的处理器;
29、所述处理器调用所述存储器中存储的所述可执行程序代码,执行上述任一实施例所述的方法。
30、本申请实施例公开了一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,其中,所述计算机程序在被处理器执行时,使得所述处理器执行上述任一实施例所述的方法。
31、通过本申请实施例公开的运行控制方法、装置、电子设备及存储介质,在无人叉车的运行过程中,获取无人叉车的定位数据;根据无人叉车的定位数据,确定无人叉车与行人避让区域之间的距离;若无人叉车与行人避让区域之间的距离小于第一距离阈值,则控制行人避让区域对应的信号灯显示第一颜色;第一颜色用于提示行人禁止经过行人避让区域;在信号灯显示第一颜色时,控制无人叉车穿过行人避让区域。本申请实施例在无人叉车即将或者正在通过行人避让区域时,控制行人避让区域对应的信号灯显示第一颜色,以使工作人员在看到信号灯显示第一颜色时及时避让无人叉车,降低了无人叉车和工作人员相互干扰和接触的风险,在人机混合场景下,提高了无人叉车和工作人员的安全性。
技术特征:
1.一种运行控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的运行控制方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的运行控制方法,其特征在于,所述行人避让区域包括转角区域;所述无人叉车设置有感应装置以及声光报警器;所述转角区域设置有防撞标签,所述防撞标签用于与所述感应装置进行无线通信;其中,
4.根据权利要求1所述的运行控制方法,其特征在于,所述行人避让区域包括多个供行人通行的分支道路;所述行人避让区域包括至少两组信号灯,每组所述信号灯设置有多个不同朝向的单面信号灯,每组所述信号灯中所述单面信号灯的数量与所述分支道路的数量对应;所述至少两组信号灯中的各个所述单面信号灯的朝向覆盖各个所述分支道路。
5.根据权利要求1所述的运行控制方法,其特征在于,所述无人叉车还设置有摄像头;所述在所述信号灯显示所述第一颜色时,控制所述无人叉车穿过所述行人避让区域,包括:
6.根据权利要求1所述的运行控制方法,其特征在于,所述无人叉车包括货叉,所述货叉的长度超过所述无人叉车搬运的货物的长度;所述货叉的叉尖设置有防撞传感器;其中,
7.根据权利要求1所述的运行控制方法,其特征在于,所述方法还包括:
8.一种运行控制装置,其特征在于,所述运行控制装置包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储计算机程序,其中,所述计算机程序在被处理器执行时,使得所述处理器执行权利要求1至7任一项所述的方法。
技术总结
本申请实施例公开了一种运行控制方法、装置、电子设备及存储介质,该方法包括:在无人叉车的运行过程中,获取无人叉车的定位数据;根据无人叉车的定位数据,确定无人叉车与行人避让区域之间的距离;若无人叉车与行人避让区域之间的距离小于第一距离阈值,则控制行人避让区域对应的信号灯显示第一颜色;第一颜色用于提示行人禁止经过行人避让区域;在信号灯显示第一颜色时,控制无人叉车穿过行人避让区域。实施本申请实施例,能够在人机混合场景下,提高无人叉车和工作人员的安全性。
技术研发人员:杨建辉,李陆洋,方牧,鲁豫杰,赵晋军
受保护的技术使用者:未来机器人(深圳)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!