一种基于视觉的自动包装设备
本发明涉及包装装置,特别涉及一种基于视觉的自动包装设备。
背景技术:
1、自动封包机是生产线中的一种关键设备,它能够快速、高效地封装产品,并保证产品的质量和安全。自动封包机的生产线技术相对比较成熟,生产线中的各个设备之间通过物料输送系统进行连接,实现自动化的生产过程。此外,自动封包机还可以配备自动化的数据管理系统,实现对生产数据的实时监控和管理,进一步提高生产线的效率和质量。
2、发明人经长期的工作与研究发现,上述传统技术存在如下技术问题:
3、在现有的带有自动封包机的生产线技术中,当需要对工件进行折叠包装并从输送带上运送至生产线下一加工流程时,由于工件在输送带上的位置容易发生偏移等变化,这会导致封包机难以准确地识别工件的位置和方向,从而影响到下一加工流程的加工。当工件在进入封包机之前,其位置和方向未得到准确定位时,可能会导致封包效果不佳,例如包装松散或者破损等问题,这会增加生产成本和产品退货率。
4、这种技术缺陷会使得生产线的工作效率下降和包装精度降低,因为封包机需要花费更多的时间来识别工件的位置和方向,进而调整工作状态以适应工件的不确定性。此外,由于工件在输送带上位置的变化,封包机在封装和包装过程中可能会出现误差,从而导致封包效果不佳。这会降低整个生产线的效率和产能,进而增加生产成本和产品质量问题。因此,解决这种技术缺陷是非常重要的,以确保生产线的工作效率和产品质量。
5、为此,提出一种基于视觉的自动包装设备。
技术实现思路
1、有鉴于此,本发明实施例希望提供一种基于视觉的自动包装设备,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择;
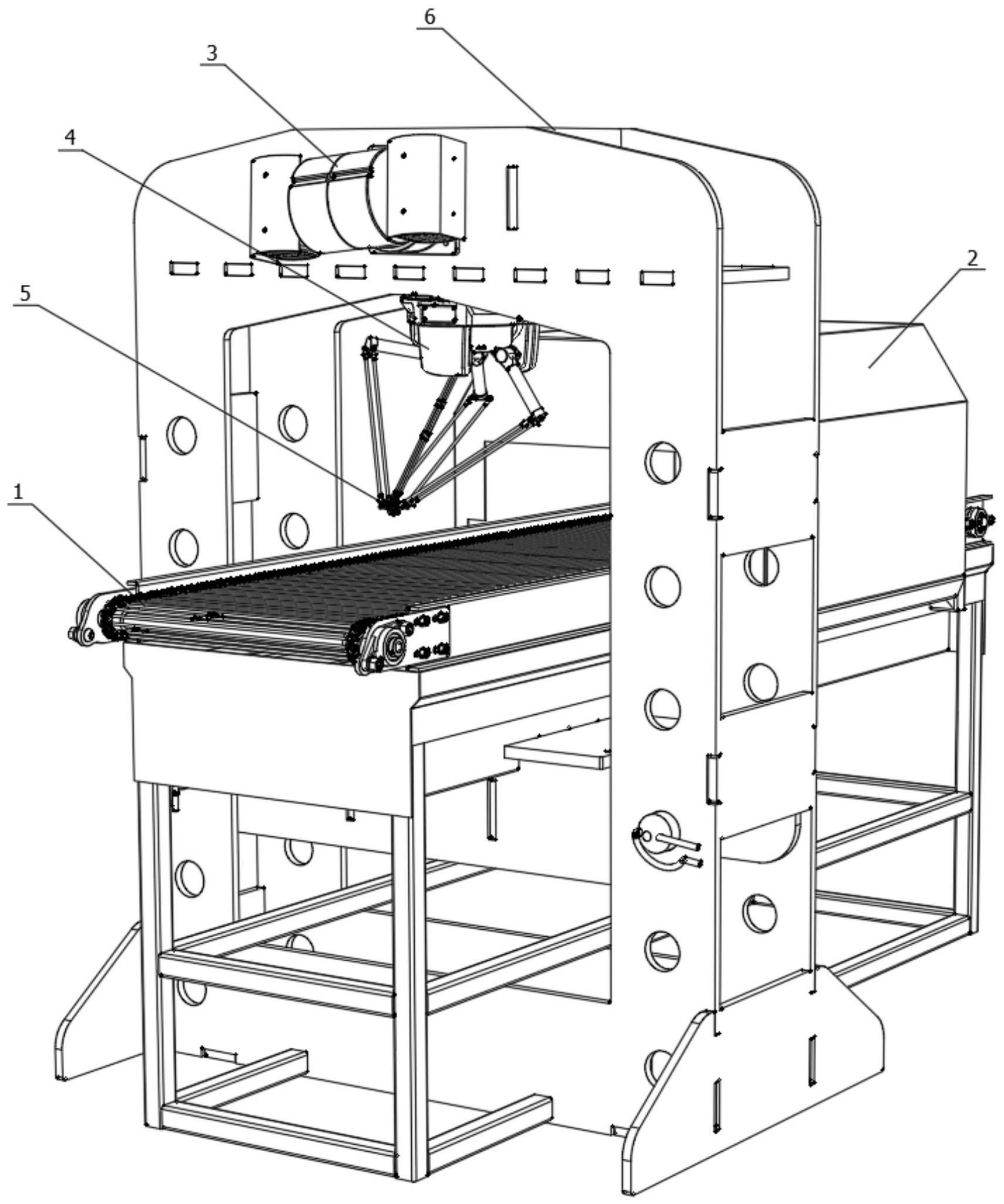
2、本发明实施例的技术方案是这样实现的:一种基于视觉的自动包装设备,包括用于运输工件的运输线体1和设置于运输线体1上对工件进行包装的封包机2,在所述运输线体1上方及所述封包机2的前方设有并联机构4;所述并联机构4包括三个沿同轴环形阵列排布的线性自由度,所述线性自由度作用于用于吸附工件的吸附件作万向调节;所述并联机构的前方设有用于检测工件在所述运输线体上运输的工件的迎入方位的视觉检测件。
3、在上述实施方式中:该基于视觉的自动包装设备主要包括运输线体和封包机,其中并联机构用于精确定位工件的位置,视觉检测件用于检测工件在输送带上的方位。
4、其中在一种实施方式中:在所述运输线体上方及所述封包机的前方设有固定连接于外部环境的立架,所述立架的前部设有所述视觉检测件,所述立架的中部或后部设有所述并联机构。
5、在上述实施方式中:在该实施方式中,基于视觉的自动包装设备中,除了运输线体和封包机之外,还增加了一个立架,用于固定并联机构和视觉检测件,并连接到外部环境。
6、其中在一种实施方式中:所述并联机构包括固定连接于所述立架的机架,所述机架以其中轴线为基准,环形阵列式排布有三个用于输出所述线性自由度的线性模组,所述线性模组驱动连接有连接架,所述连接架上安装有所述吸附件。
7、在上述实施方式中:在该实施方式中,基于视觉的自动包装设备中,并联机构由固定连接于立架的机架和环形阵列式排布的三个线性模组组成,其中吸附件连接在连接架上。
8、其中在一种实施方式中:所述线性模组包括固定连接于所述机架上的旋转执行件,所述旋转执行件旋转驱动于铰臂的一端,铰杆的两端通过球型联轴器分别万向铰接于所述铰臂的另一端和所述连接架。
9、在上述实施方式中:在这种实施方式中,所述线性模组由旋转执行件、铰臂和连接架组成,其中旋转执行件固定连接于机架上,通过铰臂和连接架实现对吸附件的驱动。
10、其中在一种实施方式中:所述旋转执行件优选为伺服电机,所述伺服电机的输出轴固定连接于所述铰臂的一端。
11、在上述实施方式中:在该实施方式中,旋转执行件采用了伺服电机,并将其输出轴固定连接在铰臂的一端,通过铰臂和连接架实现对吸附件的驱动。
12、其中在一种实施方式中:所述吸附件包括用于吸附非磁性金属工件或塑料工件的电动吸盘,或是用于吸附磁性金属工件的电磁铁中的一种或多种任意组合。
13、在上述实施方式中:在该实施方式中,吸附件包括电动吸盘和电磁铁,可用于吸附不同种类的工件。
14、其中在一种实施方式中:所述视觉检测件包括红外传感器或ccd工业视觉相机中的一种或多种任意组合。
15、在上述实施方式中:在该实施方式中,视觉检测件采用红外传感器或ccd工业视觉相机,可用于检测工件在运输过程中的迎入方位。
16、与现有技术相比,本发明的有益效果是:
17、一、提高了生产线效率:传统技术中,工件在运输过程中可能出现位置偏移和方位变化等问题,导致封包机的加工效率下降。而该项技术通过视觉检测和并联机构的调节,能够实现对工件的精确定位和包装,提高了生产线的效率。
18、二、提高了包装精度:传统技术中,由于工件在运输过程中的位置和方向难以固定,容易导致包装精度下降。而该项技术通过视觉检测和并联机构的调节,能够实现对工件的精确定位和包装,提高了包装精度。
19、三、具有较高的灵活性和可塑性:该项技术采用了并联机构作为调节装置,能够根据不同工件的加工需求进行调整和适应,具有较高的灵活性和可塑性。
20、四、自动化程度高:该项技术采用了视觉检测件和自动化的并联机构进行工件运输和包装,实现了自动化生产,减少了人工干预,提高了生产效率。
21、五、减少产品退货率:该项技术通过提高包装精度和生产线效率,能够减少产品退货率,提高了生产效益。
22、综上所述,该项技术通过视觉检测和并联机构的调节,提高了生产线效率和包装精度,具有较高的灵活性和可塑性,实现了自动化生产,减少了产品退货率,具有较好的应用前景。
技术特征:
1.一种基于视觉的自动包装设备,包括用于运输工件的运输线体(1)和设置于运输线体(1)上对工件进行包装的封包机(2),其特征在于:在所述运输线体(1)上方及所述封包机(2)的前方设有并联机构(4);
2.根据权利要求1所述的设备,其特征在于:在所述运输线体(1)上方及所述封包机(2)的前方设有固定连接于外部环境的立架(6),所述立架(6)的前部设有所述视觉检测件(3),所述立架(6)的中部或后部设有所述并联机构(4)。
3.根据权利要求2所述的设备,其特征在于:所述并联机构(4)包括固定连接于所述立架(6)的机架(401),所述机架(401)以其中轴线为基准,环形阵列式排布有三个用于输出所述线性自由度的线性模组,所述线性模组驱动连接有连接架(405),所述连接架(405)上安装有所述吸附件(4)。
4.根据权利要求3所述的设备,其特征在于:所述线性模组包括固定连接于所述机架(401)上的旋转执行件(402),所述旋转执行件(402)旋转驱动于铰臂(403)的一端,铰杆(404)的两端通过球型联轴器分别万向铰接于所述铰臂(403)的另一端和所述连接架(405)。
5.根据权利要求4所述的设备,其特征在于:所述旋转执行件(402)包括伺服电机,所述伺服电机的输出轴固定连接于所述铰臂(403)的一端。
6.根据权利要求4任意一项所述的设备,其特征在于:所述吸附件(4)包括用于吸附非磁性金属工件或塑料工件的电动吸盘,或是用于吸附磁性金属工件的电磁铁中的一种或多种任意组合。
7.根据权利要求1~6任意一项所述的设备,其特征在于:所述视觉检测件(3)包括红外传感器或ccd工业视觉相机中的一种或多种任意组合。
技术总结
本发明公开了一种基于视觉的自动包装设备,包括用于运输工件的运输线体1和设置于运输线体1上对工件进行包装的封包机2,在所述运输线体1上方及所述封包机2的前方设有并联机构4;一、提高了生产线效率:传统技术中,工件在运输过程中可能出现位置偏移和方位变化等问题,导致封包机的加工效率下降。而该项技术通过视觉检测和并联机构的调节,能够实现对工件的精确定位和包装,提高了生产线的效率。二、提高了包装精度:传统技术中,由于工件在运输过程中的位置和方向难以固定,容易导致包装精度下降。而该项技术通过视觉检测和并联机构的调节,能够实现对工件的精确定位和包装,提高了包装精度。
技术研发人员:唐雅兰,蒋学金
受保护的技术使用者:广州科技职业技术大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!