一种基于岸桥自动化系统的多对多控制系统及方法与流程
本发明涉及岸桥自动化技术,更具体地说,涉及一种基于岸桥自动化系统的多对多控制系统及方法。
背景技术:
1、结合图1所示,在现有岸桥远程控制项目中,控制方式一般为一对一控制,每台远控台仅可控制对应的岸桥,如对于远控台a1的桥吊司机,在整个作业过程中,作业对象都为岸桥a2,在岸桥自动运行过程中,司机也需要全程看着岸桥a2。在中控的操作台上,司机可以通过dataview、cctv观察岸桥作业状态,通过触摸屏和手柄按钮对岸桥进行操作。
2、随着集装箱码头岸桥自动化程度逐步提高,码头前沿岸桥轨距内作业逐步实现了无人化,岸桥远程自动化作业过程中整个装卸过程时间,远程司机人工介入操作的时间占比越来越小,从而为远控自动化岸桥实现任意一个操作台控制多台岸桥提供现实基础。在这一控过程中,需要统筹考虑岸桥设备状态、水平运输设备状态、远程视频音频无缝切换以及自动化作业指令的统一协调。
技术实现思路
1、针对现有技术中存在的缺陷,本发明的目的是提供一种基于岸桥自动化系统的多对多控制系统及方法,实现远程任务作业时操作台进行合理分配,高效、合理的利用可用的操作台资源分配最优任务。
2、为实现上述目的,本发明采用如下技术方案:
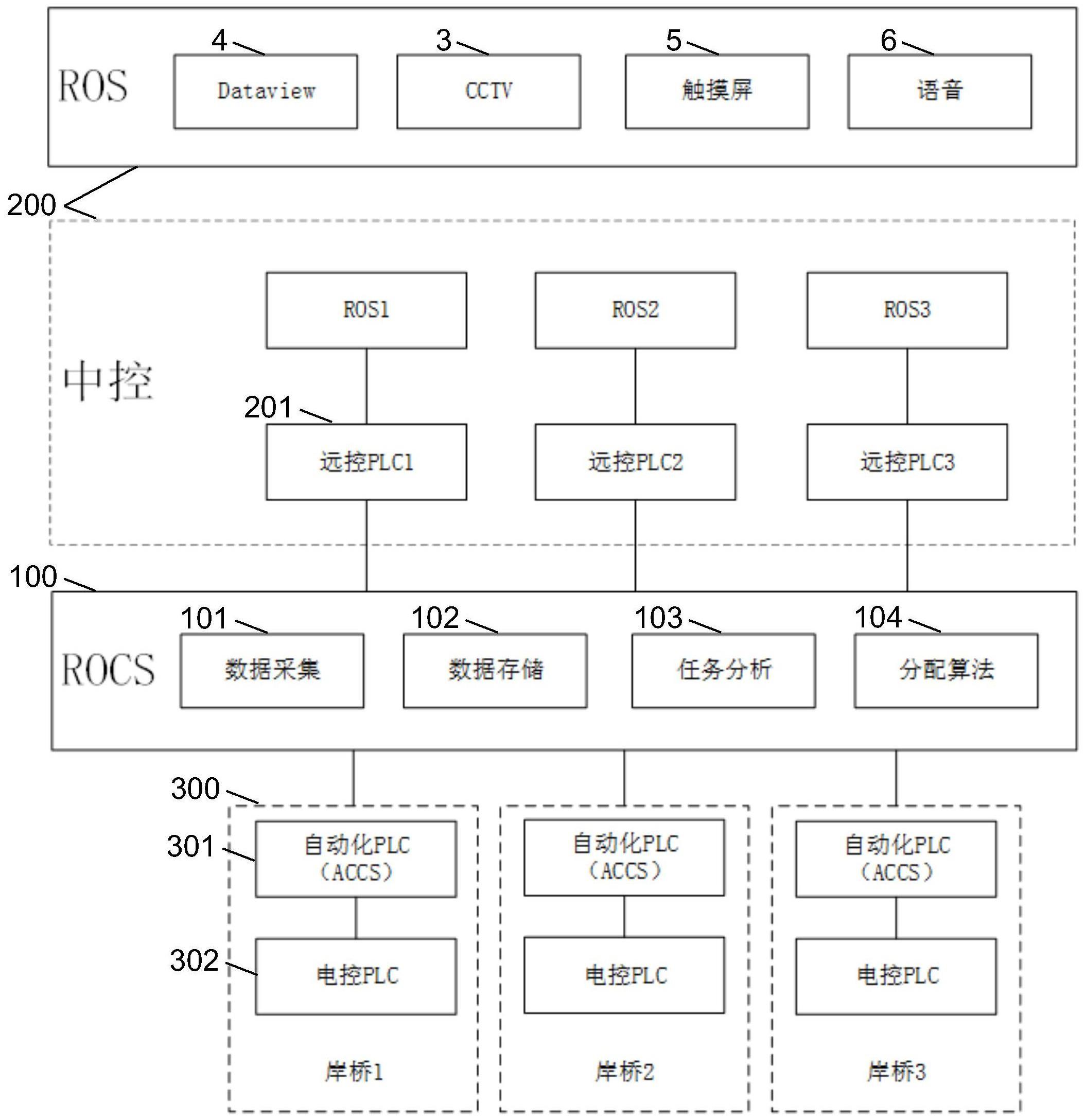
3、本发明第一方面提供了一种基于岸桥自动化系统的多对多控制系统,包括:
4、数据采集模块,分别与多台中控操作台、多台自动化岸桥建立数据通讯;
5、数据存储模块,将配置信息及所述数据采集模块采集的数据存储于数据库中;
6、任务分析模块,分析所述数据采集模块采集的数据,并判断是否符合作业条件;
7、分配算法模块,将符合作业条件的所述中控操作台、所述自动化岸桥以均匀作业方式建立连接。
8、较佳的,所述中控操作台包括:
9、dataview界面,用以显示设备状态监控、所述自动化岸桥的远程操作提示信息;
10、cctv界面,以视频动态显示各设备的运行过程;
11、触摸屏,辅助远控自动化作业任务执行、设备运行状态监控;
12、语音模块,连通远控台麦克风与所述自动化岸桥之间的广播。
13、较佳的,所述自动化岸桥上设有自动化plc和电控plc;
14、所述自动化plc用以实现自动控制,以及提供当前所述自动化岸桥的作业状态;
15、所述电控plc用以实现所述自动化plc给出的各控制动作。
16、较佳的,所述数据采集模块采用opc协议分别与所述中控操作台的远控plc、所述自动化plc建立通讯。
17、本发明第二方面提供了一种基于岸桥自动化系统的多对多控制方法,采用本发明第一方面提供的所述的基于岸桥自动化系统的多对多控制系统实现海侧作业跳台请求、陆侧作业跳台请求和故障跳台请求。
18、较佳的,所述海侧作业跳台请求包括以下步骤:
19、s1、小车从陆侧往海侧运行至跳台位置;
20、s2、所述自动化plc提出跳台请求;
21、s3、所述多对多控制系统接收跳台请求,选择合适的所述中控操作台;
22、s4、判断是否有空闲的所述中控操作台,若是,则进入步骤s5,若否,则继续判断;
23、s5、所述中控操作台连接所述自动化岸桥,并进行作业;
24、s6、作业完成后,小车返回步骤s1的指定位置;
25、s7、判断是否还有后续作业任务,若是,则进入步骤s8,若否,则释放所述中控操作台,等待后续作业任务;
26、s8、根据作业任务启动小车前往陆侧;
27、s9、小车运行至释放位置后发起释放所述中控操作台请求,等待后续陆侧作业跳台请求。
28、较佳的,所述故障跳台请求包括以下步骤:
29、s1、所述自动化岸桥发生故障;
30、s2、判断当前所述自动化岸桥是否与所述中控操作台连接,若是,则进入步骤s3,若否,则所述自动化plc选择合适的所述中控操作台连接;
31、s3、司机处理所述自动化岸桥的故障;
32、s4、解决故障后,将吊具拉至释放位置;
33、s5、释放所述中控操作台,等待后续作业任务。
34、较佳的,所述步骤s3中所述多对多控制系统选择合适的所述中控操作台具体包括:
35、当有一个新任务要下发到所述中控操作台时,所述多对多控制系统判断所有所述中控操作台并找出合适的所述中控操作台进行任务分配,若此时该合适所述中控操作台紧急拍下则视为该所述中控操作台不可用;
36、所述多对多控制系统判断所述中控操作台是否已有用户登录,若所述中控操作台没有登录则不能分配任务,需在所述dataview界面上重新登录;
37、所述多对多控制系统判断所述中控操作台是否在浏览设备,若所述中控操作台在浏览设备,则视为所述中控操作台不再分配其他任务;
38、所述多对多控制系统判断该所述中控操作台是否为最优中控操作台,若所述多对多控制系统包含的所述中控操作台中已有中控操作台设置为优先级中控操作台,则新任务会优先跳到此优先级中控操作台;没有设置优先级或者优先级中控操作台处于不可用状态时,按照空闲时长进行任务分配。
39、本发明所提供的一种基于岸桥自动化系统的多对多控制系统及方法,能够获取各台岸桥的工作状态和各操作台的空闲状态,将有人工介入需求的岸桥的远控任务分配到空闲远控操作台上,同时结合dataview的任务信息、cctv视频画面、单机plc以及语音系统来保证安全管理和安全作业。rocs完善的数据处理能力方便用户进行各种数据统计工作,能够最大程度优化分配方案,做到高效、合理的利用可用的操作台资源分配最优任务。
技术特征:
1.一种基于岸桥自动化系统的多对多控制系统,其特征在于,包括:
2.根据权利要求1所述的基于岸桥自动化系统的多对多控制系统,其特征在于,所述中控操作台包括:
3.根据权利要求1所述的基于岸桥自动化系统的多对多控制系统,其特征在于:所述自动化岸桥上设有自动化plc和电控plc;
4.根据权利要求3所述的基于岸桥自动化系统的多对多控制系统,其特征在于:所述数据采集模块采用opc协议分别与所述中控操作台的远控plc、所述自动化plc建立通讯。
5.一种基于岸桥自动化系统的多对多控制方法,其特征在于,采用如权利要求1-4之一所述的基于岸桥自动化系统的多对多控制系统实现海侧作业跳台请求、陆侧作业跳台请求和故障跳台请求。
6.根据权利要求5所述的基于岸桥自动化系统的多对多控制方法,其特征在于,所述海侧作业跳台请求包括以下步骤:
7.根据权利要求5所述的基于岸桥自动化系统的多对多控制方法,其特征在于,所述故障跳台请求包括以下步骤:
8.根据权利要求6所述的基于岸桥自动化系统的多对多控制方法,其特征在于,所述步骤s3中所述多对多控制系统选择合适的所述中控操作台具体包括:
技术总结
本发明公开了一种基于岸桥自动化系统的多对多控制系统及方法,包括:数据采集模块,分别与多台中控操作台、多台自动化岸桥建立数据通讯;数据存储模块,将配置信息及所述数据采集模块采集的数据存储于数据库中;任务分析模块,分析所述数据采集模块采集的数据,并判断是否符合作业条件;分配算法模块,将符合作业条件的所述中控操作台、所述自动化岸桥以均匀作业方式建立连接。本发明实现远程任务作业时操作台进行合理分配,高效、合理的利用可用的操作台资源分配最优任务。
技术研发人员:王一林,杨永付,何振峰,肖彦东,万青
受保护的技术使用者:上海振华重工电气有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!