管片全自动垂直运输系统的制作方法
本发明涉及隧道工程,具体涉及一种管片全自动垂直运输系统。
背景技术:
1、随着我国城市地铁、铁路、大型过江过河隧道工程及引水工程的大规模兴建,隧道工程量也节节攀升,同时对隧道施工效率的要求也越来越高,其中盾构施工物料运输是制约隧道施工效率的关键工序,提高物料运输效率迫在眉睫。
2、东京下水道千代田干线中后配套自动物料运输设备,管片等物料运送台车采用了无人化、自动化的运行管理模式。
3、日本鹿岛建设开发了一项针对山岭隧道施工的出渣运输,自动化出渣运输系统是结合了隧道内的gps定位系统、slam(同步定位与建图)技术以及无人驾驶技术,从轮式装载机装运开挖面的石渣,到运输至弃渣场的一系列作业实现了自动化。
4、法兰泰克重工股份有限公司开发了一种适应用于大型盾构机的智能化卷扬式管片吊机,该设备在满足6m~14m直径盾构机的隧道施工中管片吊运供给需求的同时,采用开环防摇控制系统,报警式起重机用遥控器的技术,吊机具有起重量大,运行速度快,结构紧凑、自动化程度高等特点,能更好的满足隧道施工进度的要求。
5、北京土木工程有限公司的“基于自动巡航的隧道内管片智能吊运系统”,该系统基于自动巡航的隧道内管片智能吊运系统及其工作方法,包括盾构管片材料系统、无人自动驾驶电瓶车,盾构机喂片机和盾构工业电脑,盾构工业电脑用于控制系统,驱动盾构管片材料系统用于向无人自动驾驶电瓶车以采料、向盾构机喂片机以送料,实现管片自动吊运功能。
6、通过对国内外相关项目、技术的调查研究,现有技术虽然有应用,但还没形成系统性的运用,特别是工作井内管片垂直运输应用,还没有真正意义是达到自动运输,更没有全面的推广应用。
7、现有技术存在的问题总结如下:
8、1)现有技术在吊装和放置管片时需要工人徒手操作,安全性较差,效率低;
9、2)现有技术在管片空中运输过程中,在空旷暴露环境下运输,没有保护措施,安全性较差;
10、3)现有技术在整体工作过程中需要行车驾驶员与地面操作人员进行对讲机沟通,行车驾驶员在吊装放置管片时存在视野盲区,存在安全隐患且更加耗时;
11、4)现有技术是将几个吊装环节分开操作,不能对整个管片运输过程进行有效监控及管理。
技术实现思路
1、针对现有技术的不足,本发明提供了一种管片全自动垂直运输系统,将原来传统的管片运输方式进行改进,达到管片运输自动化,并提高隧道施工效率,实现工作井内管片自动化垂直运输。
2、实现本发明目的的技术解决方案为:
3、一种管片全自动垂直运输系统,其包括:
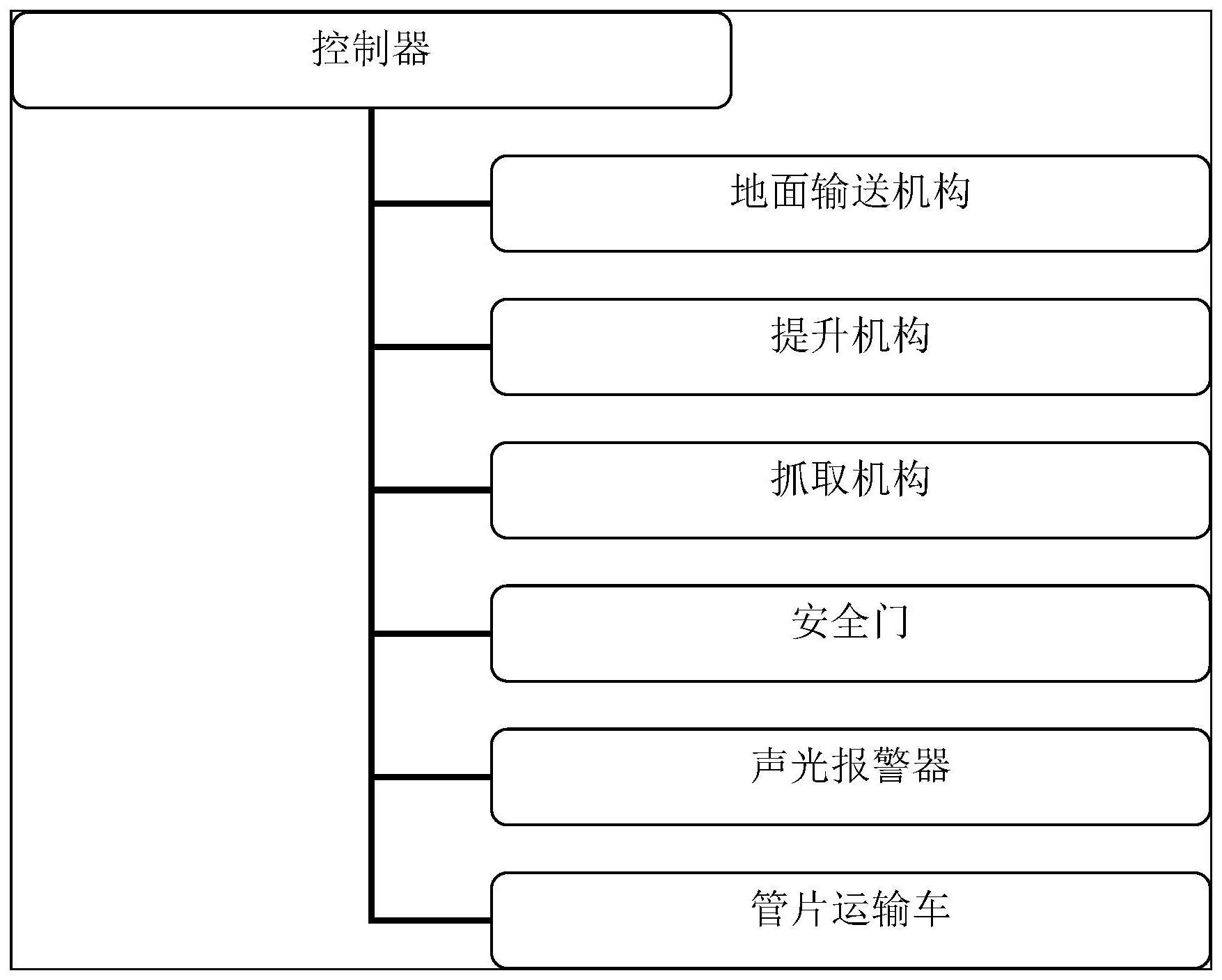
4、地面输送机构,用于将地面的管片输送到指定的吊装位置;
5、自动升降系统,包括提升机构、抓取机构、吊装架及控制器,所述吊装架固定安装在所述吊装位置上方,所述提升机构固定安装在所述吊装架上,所述抓取机构与所述提升机构连接、用于抓取所述地面输送机构上的管片,所述地面输送机构、所述提升机构、所述抓取机构均包含执行机构且与所述控制器连接,在所述控制器的控制信号作用下工作。
6、作为本发明优选实施例,所述吊装位置为地下隧道的竖井口,所述竖井通道内至少四角竖直固定有行走轨道,所述抓取机构至少四角对应所述行走轨道安装有导轮机构并通过所述导轮机构行走于所述行走轨道上,在抓取机构整体升降动作时起到导向作用。
7、作为本发明优选实施例,所述竖井底部安装有安全门,所述安全门包含有执行机构且与所述控制器连接,在所述控制器的控制信号作用下,所述安全门执行开启或关闭所述竖井通道的动作。
8、作为本发明优选实施例,所述安全门下方的所述竖井通道或所述地下隧道内安装有红外线干涉感应设备,与所述控制器连接,当安全门下方有人员进入感应范围时,所述红外线干涉感应设备探测到人体红外光谱的变化,发送信号给所述控制器,所述控制器控制所述安全门关闭。
9、作为本发明优选实施例,所述控制器还连接有声光报警器,安装于所述安全门周边的所述竖井通道或所述地下隧道内。
10、作为本发明优选实施例,还包括管片运输车,与所述控制器连接,在所述控制器的控制下行走于所述地下隧道内。
11、作为本发明优选实施例,所述地面输送机构采用管片喂片机。
12、作为本发明优选实施例,所述提升机构采用卷扬机。
13、作为本发明优选实施例,所述控制器包括互锁的两个总控面板,分别安装在地面上与竖井下,两个所述总控面板择一进行各执行机构的操控。
14、由于采用上述技术方案,使得本发明具有以下有益效果:
15、1)通过控制器控制整个管片运输过程,尽量避免人工操作环节,提高运输效率的同时,也能节省人力;
16、2)对管片垂直运输方式进行改造升级,采用地面输送机构将地面的管片输送到指定的吊装位置,地面运输更加安全高效,且节省运输成本;
17、3)用机械式固定运输取代人员沟通及操作的方式,通过各执行机构与控制器的互动,完成管片运输,比人员沟通及操作更加安全、科学且可靠,也能节省人力;
18、4)将整个管片运输过程进行整合,并建造一套针对性控制系统,整个管片运输过程均由控制器进行整体控制,控制器可集成于控制面板,通过控制面板操作各执行机构工作,并直观显示各执行结构的运行情况。
技术特征:
1.一种管片全自动垂直运输系统,其特征在于,包括:
2.根据权利要求1所述的管片全自动垂直运输系统,其特征在于,所述吊装位置为地下隧道的竖井口,所述竖井通道内至少四角竖直固定有行走轨道,所述抓取机构至少四角对应所述行走轨道安装有导轮机构并通过所述导轮机构行走于所述行走轨道上,在抓取机构整体升降动作时起到导向作用。
3.根据权利要求2所述的管片全自动垂直运输系统,其特征在于,所述竖井底部安装有安全门,所述安全门包含有执行机构且与所述控制器连接,在所述控制器的控制信号作用下,所述安全门执行开启或关闭所述竖井通道的动作。
4.根据权利要求3所述的管片全自动垂直运输系统,其特征在于,所述安全门下方的所述竖井通道或所述地下隧道内安装有红外线干涉感应设备,与所述控制器连接,当安全门下方有人员进入感应范围时,所述红外线干涉感应设备探测到人体红外光谱的变化,发送信号给所述控制器,所述控制器控制所述安全门关闭。
5.根据权利要求4所述的管片全自动垂直运输系统,其特征在于,所述控制器还连接有声光报警器,安装于所述安全门周边的所述竖井通道或所述地下隧道内。
6.根据权利要求2所述的管片全自动垂直运输系统,其特征在于,还包括管片运输车,与所述控制器连接,在所述控制器的控制下行走于所述地下隧道内。
7.根据权利要求1所述的管片全自动垂直运输系统,其特征在于,所述地面输送机构采用管片喂片机。
8.根据权利要求1所述的管片全自动垂直运输系统,其特征在于,所述提升机构采用卷扬机。
9.根据权利要求1所述的管片全自动垂直运输系统,其特征在于,所述控制器包括互锁的两个总控面板,分别安装在地面上与竖井下,两个所述总控面板择一进行各执行机构的操控。
技术总结
本发明公开了一种管片全自动垂直运输系统,包括:地面输送机构,用于将地面的管片输送到指定的吊装位置;自动升降系统,包括提升机构、抓取机构、吊装架及控制器,吊装架固定安装在吊装位置上方,提升机构固定安装在吊装架上,抓取机构与提升机构连接、用于抓取地面输送机构上的管片,地面输送机构、提升机构、抓取机构均包含执行机构且与控制器连接,在控制器的控制信号作用下工作。本发明通过控制器控制整个管片运输过程,尽量避免人工操作环节,提高效率的同时,也能节省人力;对管片垂直运输方式进行改造升级,采用地面输送机构将地面的管片输送到指定的吊装位置,地面运输更加安全高效,且节省运输成本。
技术研发人员:裴烈烽,吴惠明,李刚,李章林,吴忠明,何国军,黎燕,宋兴宝,刘宇奎,王延年,陈刚,顾永辉,蔡佳渊,沈海峰,袁镇,钟健,顾佩荣,王炜颢
受保护的技术使用者:上海隧道工程有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!