一种基于交叉25码的四向车定位装置以及定位方法与流程
本发明属于四向车定位,尤其涉及一种基于交叉25码的四向车定位装置以及定位方法。
背景技术:
1、在物流行业快速发展的过程中,对于物流仓储就需要进行全面规划和创新设计,很多企业都想实现仓库自动化运作,所以四向车就这样应运而生,它是基于各大企业所使用的一种自动化存储机器人,四向车已被各行业广泛关注,其市场发展前景也很广阔。
2、目前,传统定位方式中,使用rfid配合光电开关和定位片定位,定位精度不高,而且光电开关容易受货架横梁、光线影响,从而导致定位错误,影响四向车运行稳定性,而且每个库位都安装定位片,施工周期长,成本高。
3、另外,还有的使用二维码定位,使用时需二维码平放,立体库长时间使用时,容易导致二维码积灰,漏读率高,从而导致定位错误,四向车故障率高,水平安装的二维码需要相应的支架固定在货架上,每个支架的安装,施工工作量大,从而无法满足实际的使用需求。
技术实现思路
1、本发明目的是为了克服现有技术的不足而提供一种基于交叉25码的四向车定位装置以及定位方法,具有安装方便,成本低,不易积灰,对四向车的定位精准度高,用户体验好的优点。
2、为达到上述目的,本发明采用的技术方案是:一种基于交叉25码的四向车定位装置,包括:
3、立库货架,所述立库货架内具有网格分布的x向通道和y向通道;
4、四向车,所述四向车在所述x向通道和y向通道上进行移动;
5、交叉25码,多个所述交叉25码竖向间隔设置在所述x向通道和y向通道的横梁上;
6、成像元件,设置在所述四向车的x向和y向上,用于拍摄关于x向通道和y向通道的横梁上的图像信息;
7、处理器,与所述成像元件相连,用于接收所述成像元件发送的图像信息并以交叉25码的解码规则处理后进行四向车的定位。
8、进一步的,所述成像元件为cmos图像传感器。
9、一种基于交叉25码的四向车定位装置的定位方法,包括如下步骤:
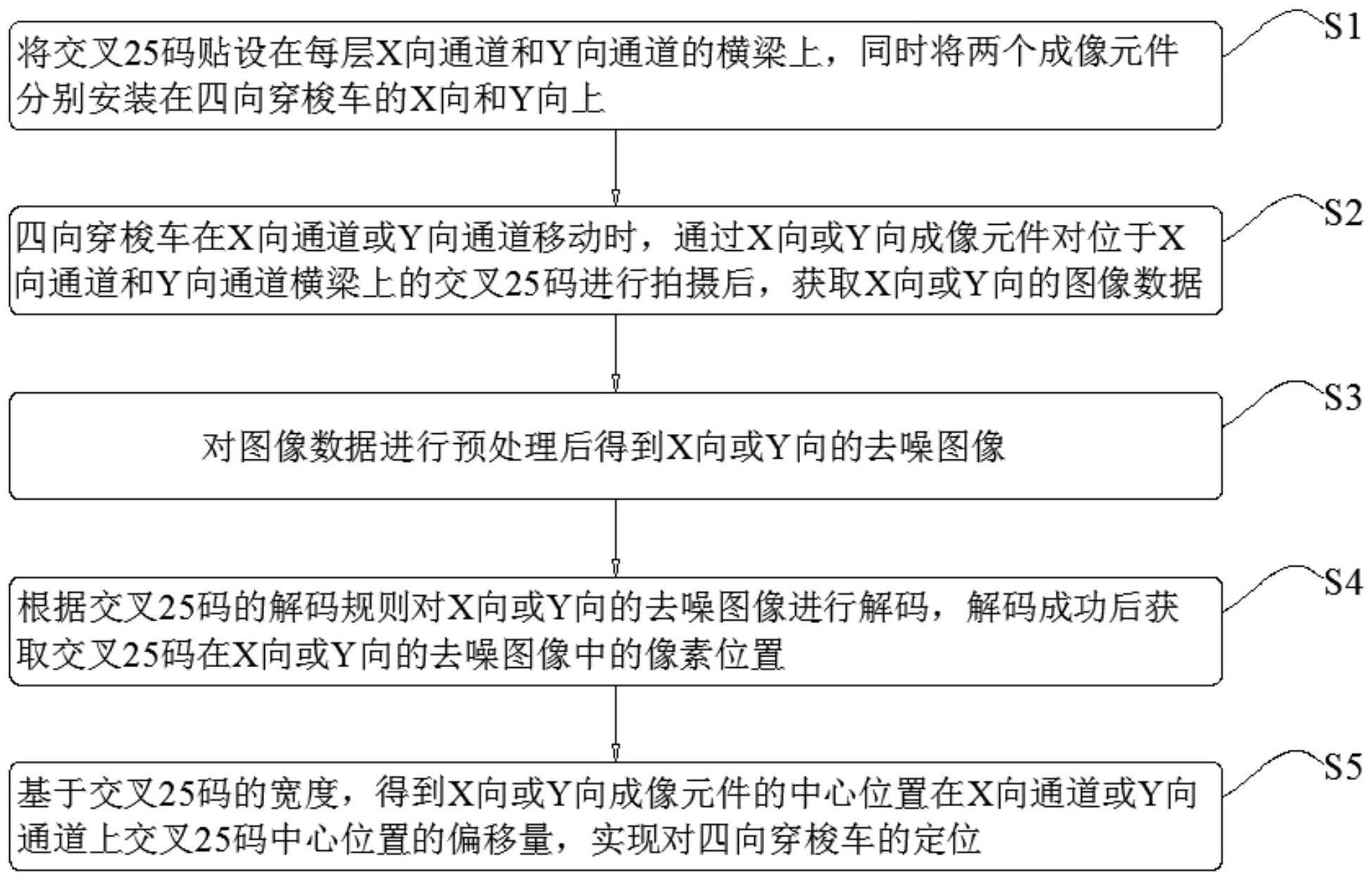
10、s1.将多个交叉25码竖向间隔贴设在每层x向通道和y向通道的横梁上,同时将两个成像元件分别安装在四向车的x向和y向上;
11、s2.四向车在x向通道或y向通道移动时,通过x向或y向成像元件对位于x向通道和y向通道横梁上的交叉25码进行拍摄后,获取x向或y向的图像数据;
12、s3.对图像数据进行预处理后得到x向或y向的去噪图像;
13、s4.根据交叉25码的解码规则对x向或y向的去噪图像进行解码,解码成功后获取交叉25码在x向或y向的去噪图像中的像素位置;
14、s5.基于交叉25码的宽度,得到x向或y向成像元件的中心位置在x向通道或y向通道上交叉25码中心位置的偏移量,从而实现对四向车的定位。
15、进一步的,所述预处理的步骤如下:首先将图像数据进行经过图像滤波,然后再进行二值化处理后得到去噪图像。
16、进一步的,根据交叉25码的解码规则对去噪后的图像进行解码的步骤如下:
17、s40.获取图像所有黑白条纹宽度;
18、s41.根据交叉25码特征判断起始符和终止符;
19、s42.对符合起始符和终止符的图像依据交叉25码编码规则进行解码,解码成功则获得交叉25码在图像中的像素位置。
20、进一步的,s5的步骤如下:
21、s50.获取图像的像素宽度pw,其中,pw根据处理器获取到成像元件的图像宽高所得;
22、s51.计算交叉25码所占用像素宽度iw和中心像素ic;iw=rw–lw+1,ic=(rw+lw)/2,其中,lw和rw分别为交叉25码的左右边界;
23、s52.计算长度/像素比c=w/iw,其中,w为贴在立库货架中的固定宽度不同码值的交叉25码,w的单位为mm;
24、s53.计算偏移量d=c*((pw/2)-ic),其中,当成像元件安装在x或y方向时,d分别表示x向或y向成像元件的中心位置在x向通道或y向通道上交叉25码中心位置的偏移量。
25、由于上述技术方案的运用,本发明与现有技术相比具有下列优点:
26、1.由处理器和成像元件配合获取稳定有效的图像数据,然后通过预处理得到去噪图片,再基于交叉25码的规则对图像进行解码,解码成功的图像获取交叉25码在图像中的像素位置,最后基于交叉25码宽度,得到成像元件的中心位置在交叉25码中心位置的偏移量,从而达到快速的对四向车的位置进行定位,并且交叉25码为一维码,处理对其的读取速度快,反应更加灵敏。
27、2.交叉25码为竖向设置在横梁上,这样在长时间使用时就不易积灰,漏检率低,进一步提升了四向车的定位准度。
技术特征:
1.一种基于交叉25码的四向车定位装置,其特征在于,包括:
2.根据权利要求1所述的基于交叉25码的四向车定位装置,其特征在于:所述成像元件为cmos图像传感器。
3.一种基于交叉25码的四向车定位装置的定位方法,其特征在于,包括如下步骤:
4.如权利要求3所述的基于交叉25码的四向车定位装置的定位方法,其特征在于,所述预处理的步骤如下:首先将图像数据进行经过图像滤波,然后再进行二值化处理后得到去噪图像。
5.如权利要求3所述的基于交叉25码的四向车定位装置的定位方法,其特征在于,根据交叉25码的解码规则对去噪后的图像进行解码的步骤如下:
6.如权利要求3所述的基于交叉25码的四向车定位装置的定位方法,其特征在于,s5的步骤如下:
技术总结
本发明公开了一种基于交叉25码的四向车定位装置以及定位方法,上述基于交叉25码的四向车定位装置包括立库货架,立库货架的每层具有X向通道和Y向通道;四向车在立库货架的X向通道和Y向通道上移动;多个交叉25码竖向间隔设置在X向通道和Y向通道的横梁上;成像元件设置在四向车的X向和Y向上;处理器与成像元件相连;本发明将由处理器和成像元件配合获取的图像数据基于交叉25码的规则进行解码,解码成功的图像获取交叉25码在图像中的像素位置,最后基于交叉25码宽度,得到成像元件的中心位置在交叉25码中心位置的偏移量,实现对四向车的快速定位,交叉25码为一维码,读取速度快,交叉25码竖向安装不易积灰。
技术研发人员:洪显义,陈林华
受保护的技术使用者:牛眼智能物流设备(苏州)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!