一种多工位圆柱电池协同旋转夹抱装置的制作方法
本发明属于圆柱电池生产设备领域,尤其涉及一种多工位圆柱电池协同旋转夹抱装置。
背景技术:
1、圆柱电池是一种容量高、循环寿命长、使用环境温度宽广的电池,广泛应用于电动自行车、电动汽车、电动工具、电动玩具、太阳能光伏等领域。随着行业的发展和市场的需求,圆柱电池生产行业中对生产效率的要求越来越高,更多的生产线不是使用人工,而是开发全自动生产线。圆柱电池从前工序进入后一工序,很多情况下需要将竖直状态的圆柱电池翻转成水平状态。在实际生产过程中,一般都是通过机械手将圆柱电池进行夹抱,然后再将圆柱电池搬运至旋转机构位置,通过旋转机构将圆柱电池进行旋转,从而满足后续生产的需求。但是这种生产方式,不仅操作麻烦,而且操作步骤多,工作效率低。
2、因此,亟需一种多工位圆柱电池协同旋转夹抱装置,以解决上述技术问题。
技术实现思路
1、针对现有技术的不足,本发明提供了一种多工位圆柱电池协同旋转夹抱装置,具备结构简单,工作效率高的优点,解决了现有技术不仅操作复杂,而且操作步骤部,工作效率低的问题。
2、为解决上述的技术问题,本发明提供如下技术方案:
3、一种多工位圆柱电池协同旋转夹抱装置,包括:
4、升降机构,所述升降机构包括升降驱动,所述升降驱动的输出端设置有升降支架;
5、旋转机构,所述旋转机构包括旋转驱动,所述旋转驱动设置在所述升降支架上,所述旋转驱动的输出端固定连接有旋转支架,所述旋转支架与所述升降支架转动连接;
6、驱动连接机构,所述驱动连接机构设置在所述旋转支架上,且所述驱动连接机构与所述旋转驱动的输出端固定连接;
7、夹抱机构,所述夹抱机构的数量为两个,且两个所述夹抱机构分别设置在所述旋转支架两端对应位置,所述夹抱机构包括夹抱支架,所述夹抱支架上设置有夹抱组件,所述夹抱组件与所述夹抱支架转动连接,所述夹抱支架上还设置有翻转驱动,所述翻转驱动与所述夹抱组件连接,且所述翻转驱动与所述驱动连接机构连接,所述旋转驱动的输出端通过所述驱动连接机构与所述翻转驱动的相互配合驱动所述夹抱组件在所述夹抱支架上转动;
8、其中,所述旋转驱动的输出端驱动所述旋转支架在所述升降支架上转动时,所述旋转驱动的输出端通过所述驱动连接机构与所述翻转驱动的相互配合驱动所述夹抱组件在所述夹抱支架上转动,所述夹抱组件的输出端在竖直状态与水平状态支架相互切换。
9、进一步地,所述驱动连接机构包括驱动组件,所述驱动组件的两端对应位置分别设置有第一连接组件和第二连接组件,所述第一连接组件和所述第二连接组件分别与所述翻转驱动连接。
10、进一步地,所述驱动组件包括主驱动,所述主驱动与所述旋转驱动的输出端固定连接,且所述主驱动与所述旋转支架转动连接,所述主驱动的两侧对应位置分别设置有从驱动,所述第一连接组件和所述第二连接组件分别与所述从驱动连接。
11、进一步地,所述主驱动为主动齿轮,所述从驱动包括从动齿轮,所述从动齿轮与所述主动齿轮相互啮合,且所述从动齿轮与所述旋转支架转动连接,所述从动齿轮上固定连接有第一驱动轮,所述第一驱动轮与所述旋转支架转动连接,所述旋转支架上与所述第一驱动轮对应位置设置有第二驱动轮,所述第二驱动轮与所述旋转支架转动连接,所述第一驱动轮与所述第二驱动轮之间设置有第一同步带,所述第一连接组件和所述第二连接组件分别与其对应的第二驱动轮固定连接。
12、进一步地,所述第一连接组件包括第一连接丝杆,所述第一连接丝杆与所述翻转驱动转动连接,所述第一连接丝杆的外表面设置有顺时针方向旋转的第一外螺纹结构,所述第一连接丝杆的外表面套设有第一连接螺母,所述第一连接螺母内表面设置有与所述第一外螺纹结构相匹配的第一内螺纹结构,且所述第一连接螺母与第二驱动轮固定连接。
13、进一步地,所述第二连接组件包括第二连接丝杆,所述第二连接丝杆与所述翻转驱动转动连接,所述第二连接丝杆的外表面设置有逆时针方向旋转的第二外螺纹结构,所述第二连接丝杆的外表面套设有第二连接螺母,所述第二连接螺母内表面设置有与所述第二外螺纹结构相匹配的第二内螺纹结构,且所述第二连接螺母与第二驱动轮固定连接。
14、进一步地,所述翻转驱动包括翻转导轨,所述翻转导轨固定连接在所述夹抱支架上,所述翻转导轨上设置有翻转座,所述翻转座与所述翻转导轨滑动连接,所述第一连接丝杆和所述第二连接丝杆分别与所述翻转座转动连接,所述翻转座上设置有齿条,所述夹抱支架上还设置有同步组件,所述同步组件与所述夹抱组件同步连接,且所述同步组件上与齿条对应位置设置有翻转齿轮,所述翻转齿轮与所述齿条相互啮合。
15、进一步地,所述同步组件包括同步轴,所述同步轴与所述翻转齿轮固定连接,且所述同步轴的两端分别与所述夹抱支架转动连接,所述同步轴上固定连接有主同步轮,所述夹抱组件上与所述主同步轮对应位置设置有从同步轮,所述主同步轮与所述从同步轮之间设置有第二同步带。
16、进一步地,所述夹抱组件包括夹抱轴,所述夹抱轴的两端分别与所述夹抱支架转动连接,所述从同步轮固定连接在所述夹抱轴的外表面,所述夹抱轴上设置有夹抱气缸,所述夹抱气缸的数量为多个,且所述夹抱气缸分别沿所述夹抱轴长度方向均匀设置,所述夹抱气缸的输出端固定连接有夹抱部件。
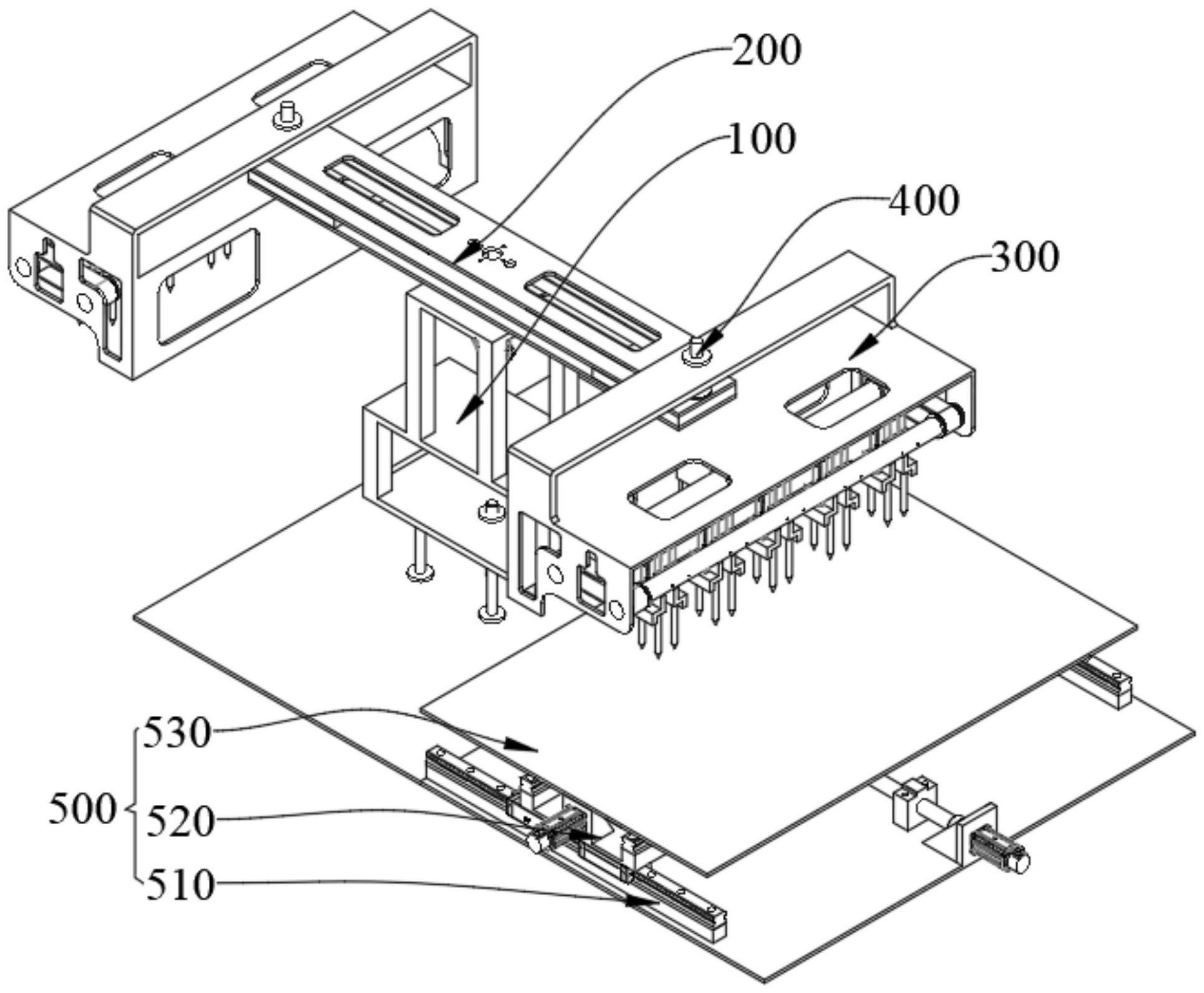
17、进一步地,还包括移动储料机构,所述移动储料机构包括第一平移组件,所述第一平移组件的输出端固定连接有第二平移组件,所述第二平移组件的输出端固定连接有储料平台。
18、借由上述技术方案,本发明提供了一种多工位圆柱电池协同旋转夹抱装置,至少具备以下有益效果:
19、1、该多工位圆柱电池协同旋转夹抱装置,通过设置旋转机构,旋转机构包括旋转驱动,旋转驱动的输出端设置有旋转支架,旋转支架的两端对应位置分别设置有夹抱机构,夹抱机构用于夹抱圆柱电池并将圆柱电池进行翻转,旋转驱动的输出端驱动旋转支架转动,从而使旋转支架两端的夹抱机构可以分别同时对圆柱电池进上料和放料,提供了工作效率。
20、2、该多工位圆柱电池协同旋转夹抱装置,通过设置驱动连接装置和翻转驱动,旋转驱动的输出端在驱动旋转支架转动的同时还能通过驱动连接装置和翻转驱动的相互配合驱动夹抱组件在夹抱支架上转动,从而使夹抱组件的输出端在竖直状态和水平状态之间进行切换,结构简单,减少操作流程,提高工作效率。
技术特征:
1.一种多工位圆柱电池协同旋转夹抱装置,其特征在于,包括:
2.根据权利要求1所述的多工位圆柱电池协同旋转夹抱装置,其特征在于,所述驱动连接机构(400)包括驱动组件(410),所述驱动组件(410)的两端对应位置分别设置有第一连接组件(420)和第二连接组件(430),所述第一连接组件(420)和所述第二连接组件(430)分别与所述翻转驱动(330)连接。
3.根据权利要求2所述的多工位圆柱电池协同旋转夹抱装置,其特征在于,所述驱动组件(410)包括主驱动(411),所述主驱动(411)与所述旋转驱动(210)的输出端固定连接,且所述主驱动(411)与所述旋转支架(220)转动连接,所述主驱动(411)的两侧对应位置分别设置有从驱动(412),所述第一连接组件(420)和所述第二连接组件(430)分别与所述从驱动(412)连接。
4.根据权利要求3所述的多工位圆柱电池协同旋转夹抱装置,其特征在于,所述主驱动(411)为主动齿轮,所述从驱动(412)包括从动齿轮(4121),所述从动齿轮(4121)与所述主动齿轮相互啮合,且所述从动齿轮(4121)与所述旋转支架(220)转动连接,所述从动齿轮(4121)上固定连接有第一驱动轮(4122),所述第一驱动轮(4122)与所述旋转支架(220)转动连接,所述旋转支架(220)上与所述第一驱动轮(4122)对应位置设置有第二驱动轮(4123),所述第二驱动轮(4123)与所述旋转支架(220)转动连接,所述第一驱动轮(4122)与所述第二驱动轮(4123)之间设置有第一同步带(4124),所述第一连接组件(420)和所述第二连接组件(430)分别与其对应的第二驱动轮(4123)固定连接。
5.根据权利要求4所述的多工位圆柱电池协同旋转夹抱装置,其特征在于,所述第一连接组件(420)包括第一连接丝杆,所述第一连接丝杆与所述翻转驱动(330)转动连接,所述第一连接丝杆的外表面设置有顺时针方向旋转的第一外螺纹结构,所述第一连接丝杆的外表面套设有第一连接螺母,所述第一连接螺母内表面设置有与所述第一外螺纹结构相匹配的第一内螺纹结构,且所述第一连接螺母与第二驱动轮(4123)固定连接。
6.根据权利要求5所述的多工位圆柱电池协同旋转夹抱装置,其特征在于,所述第二连接组件(430)包括第二连接丝杆,所述第二连接丝杆与所述翻转驱动(330)转动连接,所述第二连接丝杆的外表面设置有逆时针方向旋转的第二外螺纹结构,所述第二连接丝杆的外表面套设有第二连接螺母,所述第二连接螺母内表面设置有与所述第二外螺纹结构相匹配的第二内螺纹结构,且所述第二连接螺母与第二驱动轮(4123)固定连接。
7.根据权利要求6所述的多工位圆柱电池协同旋转夹抱装置,其特征在于,所述翻转驱动(330)包括翻转导轨(331),所述翻转导轨(331)固定连接在所述夹抱支架(310)上,所述翻转导轨(331)上设置有翻转座(332),所述翻转座(332)与所述翻转导轨(331)滑动连接,所述第一连接丝杆和所述第二连接丝杆分别与所述翻转座(332)转动连接,所述翻转座(332)上设置有齿条(333),所述夹抱支架(310)上还设置有同步组件(335),所述同步组件(335)与所述夹抱组件(320)同步连接,且所述同步组件(335)上与齿条(333)对应位置设置有翻转齿轮(334),所述翻转齿轮(334)与所述齿条(333)相互啮合。
8.根据权利要求7所述的多工位圆柱电池协同旋转夹抱装置,其特征在于,所述同步组件(335)包括同步轴(3351),所述同步轴(3351)与所述翻转齿轮(334)固定连接,且所述同步轴(3351)的两端分别与所述夹抱支架(310)转动连接,所述同步轴(3351)上固定连接有主同步轮(3352),所述夹抱组件(320)上与所述主同步轮(3352)对应位置设置有从同步轮(3353),所述主同步轮(3352)与所述从同步轮(3353)之间设置有第二同步带(3354)。
9.根据权利要求8所述的多工位圆柱电池协同旋转夹抱装置,其特征在于,所述夹抱组件(320)包括夹抱轴(321),所述夹抱轴(321)的两端分别与所述夹抱支架(310)转动连接,所述从同步轮(3353)固定连接在所述夹抱轴(321)的外表面,所述夹抱轴(321)上设置有夹抱气缸(322),所述夹抱气缸(322)的数量为多个,且所述夹抱气缸(322)分别沿所述夹抱轴(321)长度方向均匀设置,所述夹抱气缸(322)的输出端固定连接有夹抱部件(323)。
10.根据权利要求1-9任一项所述的多工位圆柱电池协同旋转夹抱装置,其特征在于,还包括移动储料机构(500),所述移动储料机构(500)包括第一平移组件(510),所述第一平移组件(510)的输出端固定连接有第二平移组件(520),所述第二平移组件(520)的输出端固定连接有储料平台(530)。
技术总结
本发明属于圆柱电池生产设备领域,尤其涉及一种多工位圆柱电池协同旋转夹抱装置,包括:升降机构,旋转机构,驱动连接机构,所述驱动连接机构设置在所述旋转支架上,且所述驱动连接机构与所述旋转驱动的输出端固定连接;夹抱机构,所述夹抱机构的数量为两个,所述夹抱机构包括夹抱支架,所述夹抱支架上设置有夹抱组件,所述夹抱组件与所述夹抱支架转动连接,所述夹抱支架上还设置有翻转驱动,所述翻转驱动与所述夹抱组件连接,且所述翻转驱动与所述驱动连接机构连接。本发明通过设置旋转机构,旋转机构包括旋转驱动,旋转驱动的输出端驱动旋转支架转动,从而使旋转支架两端的夹抱机构可以分别同时对圆柱电池进上料和放料,提供了工作效率。
技术研发人员:刘建云,马涛,张叶红
受保护的技术使用者:旭日东智能装备(广东)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!