一种取料速度控制方法、装置、电子设备及存储介质与流程
本申请涉及自动化,具体而言,涉及一种取料速度控制方法、装置、电子设备及存储介质。
背景技术:
1、近年来随着国民经济的高速发展,各行各业对散料取料设备的需求量越来越大,同时对其要求也越来越高,例如在要求提高工作效率的同时提高其安全性。现有的取料设备在进行取料作业之前,通常会为其设定好取料路径和取料速度策略。但由于在实际应用中堆料本身会发生位移,导致预先设置的策略不能满足取料要求。
技术实现思路
1、本申请实施例的目的在于一种取料速度控制方法、装置、电子设备及存储介质,通过对待识别图像中的取料斗料仓进行图像识别,获得料斗内部的物料高度,通过物料高度动态调整取料斗掘进速度,对取料操作进行准确控制,满足取料要求。
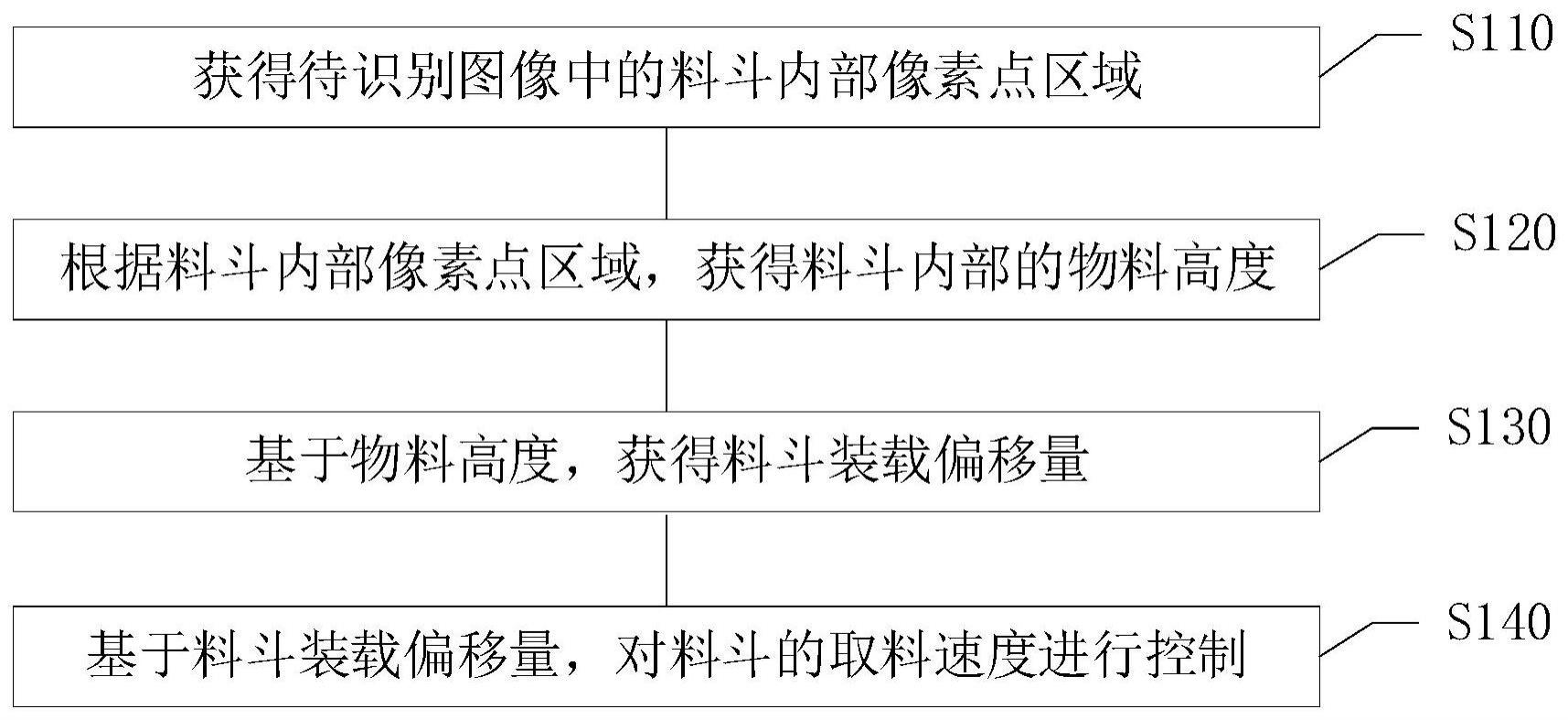
2、第一方面,本申请实施例提供了一种取料速度控制方法,包括:获得待识别图像中的料斗内部像素点区域;根据料斗内部像素点区域,获得料斗内部的物料高度;基于物料高度,获得料斗装载偏移量;基于料斗装载偏移量,对料斗的取料速度进行控制。
3、在上述的实现过程中,通过对待识别图像中的料斗内部像素点区域进行图像分析处理,获得料斗内部的物料高度,通过物料高度动态调整取料斗的取料速度,对取料操作进行更精确的控制,满足取料要求。
4、可选的,在本申请实施例中,根据料斗内部像素点区域,获得料斗内部的物料高度,包括:基于预设的像素分量权重,获得料斗内部像素点区域中每一像素点的亮度信息;根据每一像素点的亮度信息,确定料斗内部亮度信息;根据料斗内部亮度信息,在预设的数据库中匹配料斗内部亮度信息对应的料斗内部的物料高度。
5、在上述的实现过程中,通过获取每一像素点的亮度信息,计算料斗内部亮度信息,并通过料斗内部亮度信息确定料斗内部的物料高度,提高料斗内部物料高度计算的准确性,为后续的速度控制提供准确的物料高度依据,以使取料速度控制更精准。
6、可选的,在本申请实施例中,像素分量权重包括红通道像素分量权重、绿通道像素分量权重和蓝通道像素分量权重;基于预设的像素分量权重,获得料斗内部像素点区域中每一像素点的亮度信息,包括:基于红通道像素分量权重、绿通道像素分量权重和蓝通道像素分量权重,通过加权求和算法,获得料斗内部像素点区域中每一像素点的亮度信息。
7、在上述的实现过程中,通过像素的基色分量所对应的权重,以及加权求和算法,获得料斗内部像素点区域中每一像素点的亮度信息,提高料斗内部亮度信息的准确性,从而提高料斗内部物料高度计算的准确性。
8、可选的,在本申请实施例中,根据料斗内部像素点区域,获得料斗内部的物料高度,包括:对料斗内部像素点区域进行二值化处理,获得料斗内部像素点对应的装料区像素点信息;基于装料区像素点信息,获得料斗内部的物料高度。
9、在上述的实现过程中,通过对料斗内部像素点区域进行二值化处理,获得料斗内部像素点对应的装料区像素点信息,准确的区分出装料区像素点区域的非装料区像素点区域,提高料斗内部物料高度计算的准确性。
10、可选的,在本申请实施例中,基于装料区像素点信息,获得料斗内部的物料高度,包括:基于装料区像素点信息和料斗内部像素点区域的像素点比值,获得料斗内部的物料高度;或,基于装料区像素点信息对应的像素点数量,获得料斗内部的物料高度。
11、在上述的实现过程中,通过装料区像素点信息比值或数量,准确的区分出装料区像素点区域的非装料区像素点区域,提高料斗内部物料高度计算的准确性。
12、可选的,在本申请实施例中,基于料斗装载偏移量,对料斗的取料速度进行控制,包括:通过控制算法,根据料斗装载偏移量,对取料速度进行控制;取料速度为料斗运行方向的速度;控制算法包括:
13、vz=kp*(w+1/ti*e1+td*e2)
14、其中,vz为取料速度,kp为比例偏差,ti为积分偏差,td为微分偏差,w为料斗装载偏移量,e1为积分误差,e2为导数误差。
15、在上述的实现过程中,通过控制算法,根据料斗装载偏移量,准确的对料斗运行方向的取料速度进行动态控制,以使对料斗装载量进行控制,使其取料量符合用户需求。
16、可选的,在本申请实施例中,获得待识别图像中的料斗内部像素点区域,包括:获得待识别图像中像素点的水平方向梯度值和垂直方向梯度值;其中,待识别图像是通过装配于取料头的图像采集装置采集到的;基于水平方向梯度值和垂直方向梯度值,获得待识别图像的边缘信息;基于边缘信息获得料斗内部像素点区域。
17、在上述的实现过程中,通过获得待识别图像中像素点的水平方向梯度值和垂直方向梯度值,进而获得待识别图像的边缘信息,提高料斗内部像素点区域的准确性。
18、第二方面,本申请实施例还提供了一种取料速度控制装置,包括:获取模块,用于获得待识别图像中的料斗内部像素点区域;物料高度计算模块,用于根据料斗内部像素点区域,获得料斗内部的物料高度;偏移量模块,用于基于物料高度,获得料斗装载偏移量;速度控制模块,用于基于料斗装载偏移量,对料斗的取料速度进行控制。
19、第三方面,本申请实施例还提供了一种电子设备,包括:处理器和存储器,存储器存储有处理器可执行的机器可读指令,机器可读指令被处理器执行时执行如上面描述的方法。
20、第四方面,本申请实施例还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行上面描述的方法。
21、采用本申请提供取料速度控制方法、装置、电子设备及存储介质,通过对待识别图像中的料斗内部像素点区域进行图像分析处理,获得料斗内部的物料高度,通过物料高度动态调整取料斗的取料速度,对取料操作进行准确控制,满足取料要求。
技术特征:
1.一种取料速度控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述料斗内部像素点区域,获得料斗内部的物料高度,包括:
3.根据权利要求2所述的方法,其特征在于,所述像素分量权重包括红通道像素分量权重、绿通道像素分量权重和蓝通道像素分量权重;所述基于预设的像素分量权重,获得所述料斗内部像素点区域中每一像素点的亮度信息,包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述料斗内部像素点区域,获得料斗内部的物料高度,包括:
5.根据权利要求4所述的方法,其特征在于,所述基于所述装料区像素点信息,获得所述料斗内部的物料高度,包括:
6.根据权利要求1所述的方法,其特征在于,所述基于所述料斗装载偏移量,对所述料斗的取料速度进行控制,包括:
7.根据权利要求1-6任一所述的方法,其特征在于,所述获得待识别图像中的料斗内部像素点区域,包括:
8.一种取料速度控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:处理器和存储器,所述存储器存储有所述处理器可执行的机器可读指令,所述机器可读指令被所述处理器执行时执行如权利要求1至7任一所述的方法。
10.一种计算机可读存储介质,其特征在于,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如权利要求1至7任一所述的方法。
技术总结
本申请提供一种取料速度控制方法、装置、电子设备及存储介质,该方法包括:获得待识别图像中的料斗内部像素点区域;根据料斗内部像素点区域,获得料斗内部的物料高度;基于物料高度,获得料斗装载偏移量;基于料斗装载偏移量,对料斗的取料速度进行控制。通过对待识别图像中的料斗内部像素点区域进行图像分析处理,获得料斗内部的物料高度,通过物料高度动态调整取料斗掘进速度,对取料操作进行准确控制,满足取料要求。
技术研发人员:张志勇,余林洪,袁超
受保护的技术使用者:重庆赛迪奇智人工智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!