一种货物搬运机器人
本发明属于物流搬运,具体涉及一种货物搬运机器人。
背景技术:
1、随着现代科学技术的发展,其带来的先进技术逐渐辐射到各行各业,其中物流业就是现代现代科学技术的一个受益体现,其中物流行业随着互联网的发展,网购的出现而迸发春天,而物流服务为了满足日益增长的服务体量,传统的人工处理已然无法满足,因此利用机器人来处理货物已然成为当下最为主流的方法之一。
2、其中利用机器人来对货物进行搬运,是节省人力的重要手段之一,目前利用机器人搬运,主要是将货物存放置货架上,然后利用机器人集中搬运货架到指定区域,配合其他机器人起到货物的装卸,而目前的机器人搬运设备大多直接采用顶升货架的方式,这样虽然方便快捷,但是仅仅单纯的顶升容易受到外界的影响或货架上货物的重心变化影响等,而产生货架的倾倒问题,这样的稳定性不高,无法达到物流货物搬运的安全需要。
技术实现思路
1、本发明的目的是:旨在提供一种货物搬运机器人,用于解决背景技术中提到的问题。
2、为实现上述技术目的,本发明采用的技术方案如下:
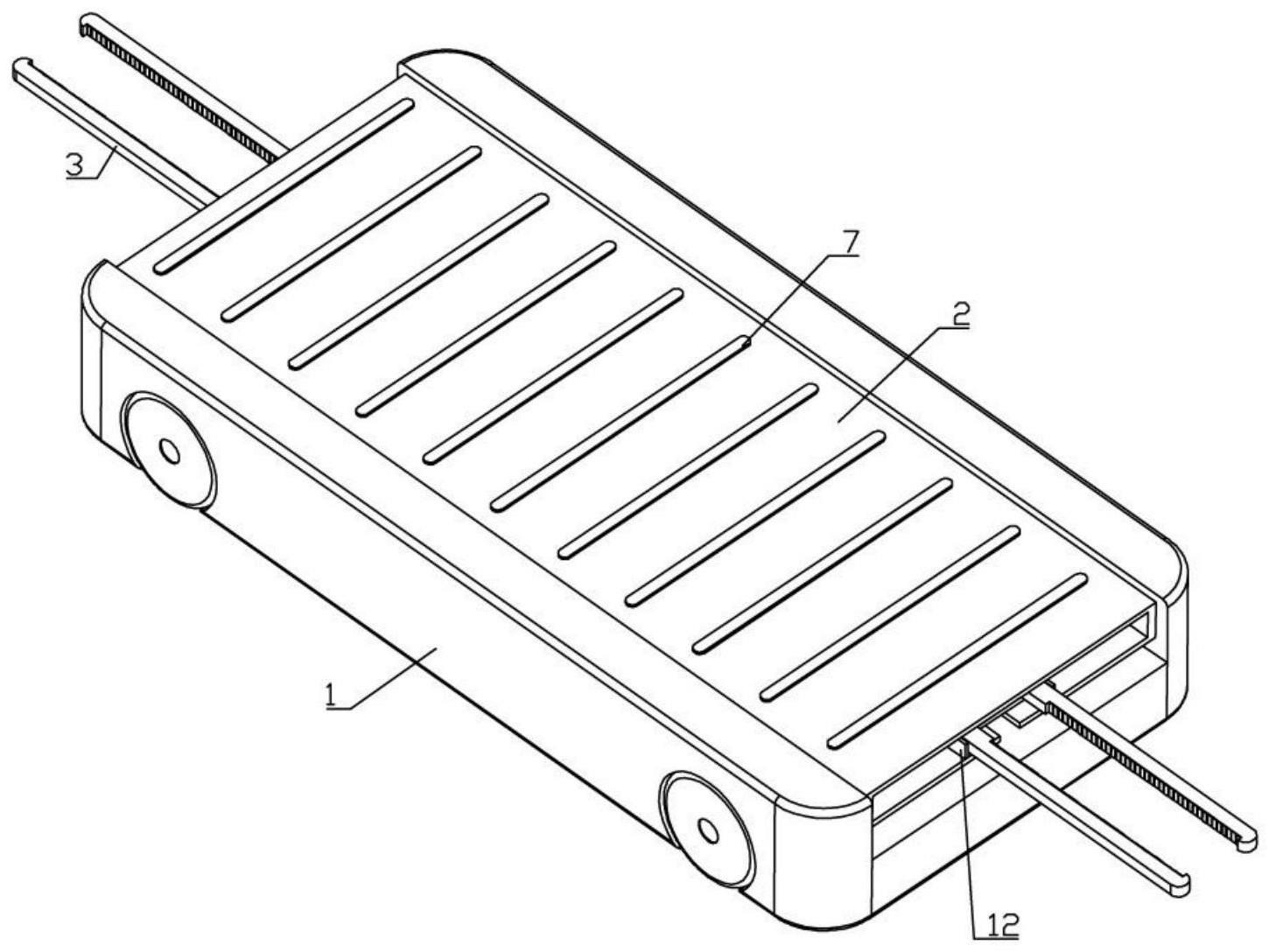
3、一种货物搬运机器人,包括车体、顶升器、控制面板和蓄电池,所述顶升器设于所述车体上端并与控制面板和蓄电池电信号连接,所述控制面板与所述蓄电池电信号连接,所述顶升器与所述车体之间还设有稳定机构;
4、所述稳定机构包括驱动组件和限位组件,所述驱动组件设于所述顶升器中部,所述限位组件的数量为两个并包括齿条、限位臂和导向条,两个所述限位组件围绕所述驱动组件中心对称分布,所述齿条与所述驱动组件传动连接并与所述顶升器滑动连接,所述限位臂与所述齿条一侧下端弹性铰接,所述导向条与所述顶升器连接并与所述限位臂相匹配。
5、所述顶升器包括举升油缸和举升板,所述举升油缸的数量为若干个并分布于所述车体上端中部和四角,所述举升板与若干所述举升油缸的输出轴连接。
6、所述驱动组件包括电机和齿轮,所述电机嵌设于所述举升油缸的输出轴,所述举升板整体呈空心矩形状结构,所述齿轮转动设于所述举升板的空心部并与所述电机的输出轴传动连接,所述齿条与所述齿轮啮合。
7、所述限位臂包括一个摆臂和若干弹性卡件,所述摆臂与所述齿条弹性铰接,若干所述弹性卡件均匀设于所述摆臂侧面,所述摆臂开有与所述弹性卡件相匹配的第一导液槽,所述齿条开有与所述第一导液槽连通的第二导液槽,所述第二导液槽通过软管与嵌设于车体的储油器连通并设有第一通断阀。
8、所述弹性卡件包括一个卡片、两个滑杆、两个限位片和两个弹簧,所述摆臂开有与所述弹性卡件相匹配的第一台阶孔,所述限位片滑动密封设于所述第一台阶孔内,所述滑杆与所述限位片连接并伸出所述第一台阶孔,所述弹簧套设于所述滑杆并位于所述第一台阶孔内,所述卡片与两个所述滑杆连接,所述第一台阶孔与所述第一导液槽连通;这样能够通过液压油的供送通断,快速方便的实现卡片的伸缩,进而起到对货架的限位保护。
9、所述齿条另一端还设有同步器,所述同步器包括长杆、圆片和载块,所述齿条另一侧开有第二台阶孔,所述圆片滑动设于所述第二台阶孔内,所述长杆与所述圆片连接并伸出所述第二台阶孔,所述载块与所述长杆另一端连接,所述载块下端还设有一个限位臂,两个所述齿条位于同一侧的两个所述限位臂之间通过连杆连接,所述连杆开有与所述第一导液槽相匹配的分液槽;这样能够进一步对货架进行限位,提高稳定性。
10、所述车体与所述连杆之间还左右对称设有稳定机构,所述稳定机构包括油缸、活塞和活塞柱,所述举升板下端中部开有与所述稳定机构相匹配的活动槽,所述油缸与所述车体铰接并与所述活动槽相匹配,所述活塞滑动密封设于所述油缸内,所述活塞柱与所述活塞连接并滑动伸出所述油缸与所述连杆铰接,所述油缸另一端通过导管与嵌设于车体的储油器连接并设有第二通断阀;这样能够对部件提供受力支撑和保护,避免受力过大而损坏。
11、所述举升板上端均匀设有若干摩擦条;这样可更加有效的对货架进行支撑。
12、本发明相较于现有技术至少具有以下优点:
13、通过稳定机构的设置,在对货架货物进行搬运时,能够对货架的支撑脚进行同步的限位固定,避免单纯的顶升而容易出现不稳定、易倾倒的问题,提高货物搬运的稳定性;同步器的设置,能够进一步的对货架进行更加稳定的限位支撑,进一步提高稳定性;支撑机构的设置,则能够进一步的对限位臂等其他部件进行受力支撑,避免部件受力过大而产生弯曲损坏,提高对部件的保护。
技术特征:
1.一种货物搬运机器人,包括车体、顶升器、控制面板和蓄电池,所述顶升器设于所述车体上端并与控制面板和蓄电池电信号连接,所述控制面板与所述蓄电池电信号连接,其特征在于:所述顶升器与所述车体之间还设有稳定机构;
2.根据权利要求1所述的一种货物搬运机器人,其特征在于:所述顶升器包括举升油缸和举升板,所述举升油缸的数量为若干个并分布于所述车体上端中部和四角,所述举升板与若干所述举升油缸的输出轴连接。
3.根据权利要求2所述的一种货物搬运机器人,其特征在于:所述驱动组件包括电机和齿轮,所述电机嵌设于所述举升油缸的输出轴,所述举升板整体呈空心矩形状结构,所述齿轮转动设于所述举升板的空心部并与所述电机的输出轴传动连接,所述齿条与所述齿轮啮合。
4.根据权利要求3所述的一种货物搬运机器人,其特征在于:所述限位臂包括一个摆臂和若干弹性卡件,所述摆臂与所述齿条弹性铰接,若干所述弹性卡件均匀设于所述摆臂侧面,所述摆臂开有与所述弹性卡件相匹配的第一导液槽,所述齿条开有与所述第一导液槽连通的第二导液槽,所述第二导液槽通过软管与嵌设于车体的储油器连通并设有第一通断阀。
5.根据权利要求4所述的一种货物搬运机器人,其特征在于:所述弹性卡件包括一个卡片、两个滑杆、两个限位片和两个弹簧,所述摆臂开有与所述弹性卡件相匹配的第一台阶孔,所述限位片滑动密封设于所述第一台阶孔内,所述滑杆与所述限位片连接并伸出所述第一台阶孔,所述弹簧套设于所述滑杆并位于所述第一台阶孔内,所述卡片与两个所述滑杆连接,所述第一台阶孔与所述第一导液槽连通。
6.根据权利要求5所述的一种货物搬运机器人,其特征在于:所述齿条另一端还设有同步器,所述同步器包括长杆、圆片和载块,所述齿条另一侧开有第二台阶孔,所述圆片滑动设于所述第二台阶孔内,所述长杆与所述圆片连接并伸出所述第二台阶孔,所述载块与所述长杆另一端连接,所述载块下端还设有一个限位臂,两个所述齿条位于同一侧的两个所述限位臂之间通过连杆连接,所述连杆开有与所述第一导液槽相匹配的分液槽。
7.根据权利要求6所述的一种货物搬运机器人,其特征在于:所述车体与所述连杆之间还左右对称设有支撑机构,所述支撑机构包括油缸、活塞和活塞柱,所述举升板下端中部开有与所述稳定机构相匹配的活动槽,所述油缸与所述车体铰接并与所述活动槽相匹配,所述活塞滑动密封设于所述油缸内,所述活塞柱与所述活塞连接并滑动伸出所述油缸与所述连杆铰接,所述油缸另一端通过导管与嵌设于车体的储油器连接并设有第二通断阀。
8.根据权利要求7所述的一种货物搬运机器人,其特征在于:所述举升板上端均匀设有若干摩擦条。
技术总结
本发明属于物流搬运技术领域,具体涉及一种货物搬运机器人,通过稳定机构的设置,在对货架货物进行搬运时,能够对货架的支撑脚进行同步的限位固定,避免单纯的顶升而容易出现不稳定、易倾倒的问题,提高货物搬运的稳定性;同步器的设置,能够进一步的对货架进行更加稳定的限位支撑,进一步提高稳定性;支撑机构的设置,则能够进一步的对限位臂等其他部件进行受力支撑,避免部件受力过大而产生弯曲损坏,提高对部件的保护。
技术研发人员:朱开波
受保护的技术使用者:重庆工业职业技术学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!