一种用于悬挂生产线的工件旋转定位系统及其工作方法与流程
本发明属于产品制造,具体涉及一种用于悬挂生产线的工件旋转定位系统及其工作方法。
背景技术:
1、悬挂生产线是一种三维空间闭环连续输送系统,适用于车间内部和车间之间成件物品的自动化输送。悬挂生产线广泛适用于烤漆、金属涂装、生产组装线等。
2、目前很多生产作业使用悬挂工件流转的方式,需要对悬挂工件的每个吊钩进行定位改造,不仅会产生很大的成本,而且在流转过程中需要进行翻面时,往往还需要人工参与,操作难度大、工作效率低。
技术实现思路
1、为了解决上述现有问题,本发明的目的在于提供一种用于悬挂生产线的工件旋转定位系统及其工作方法,能够实现工件在悬挂生产线流转过程中的自动旋转定位,高效地完成该道工序,自动化程度高,并有效降低生产成本。
2、本发明通过以下技术方案来实现:
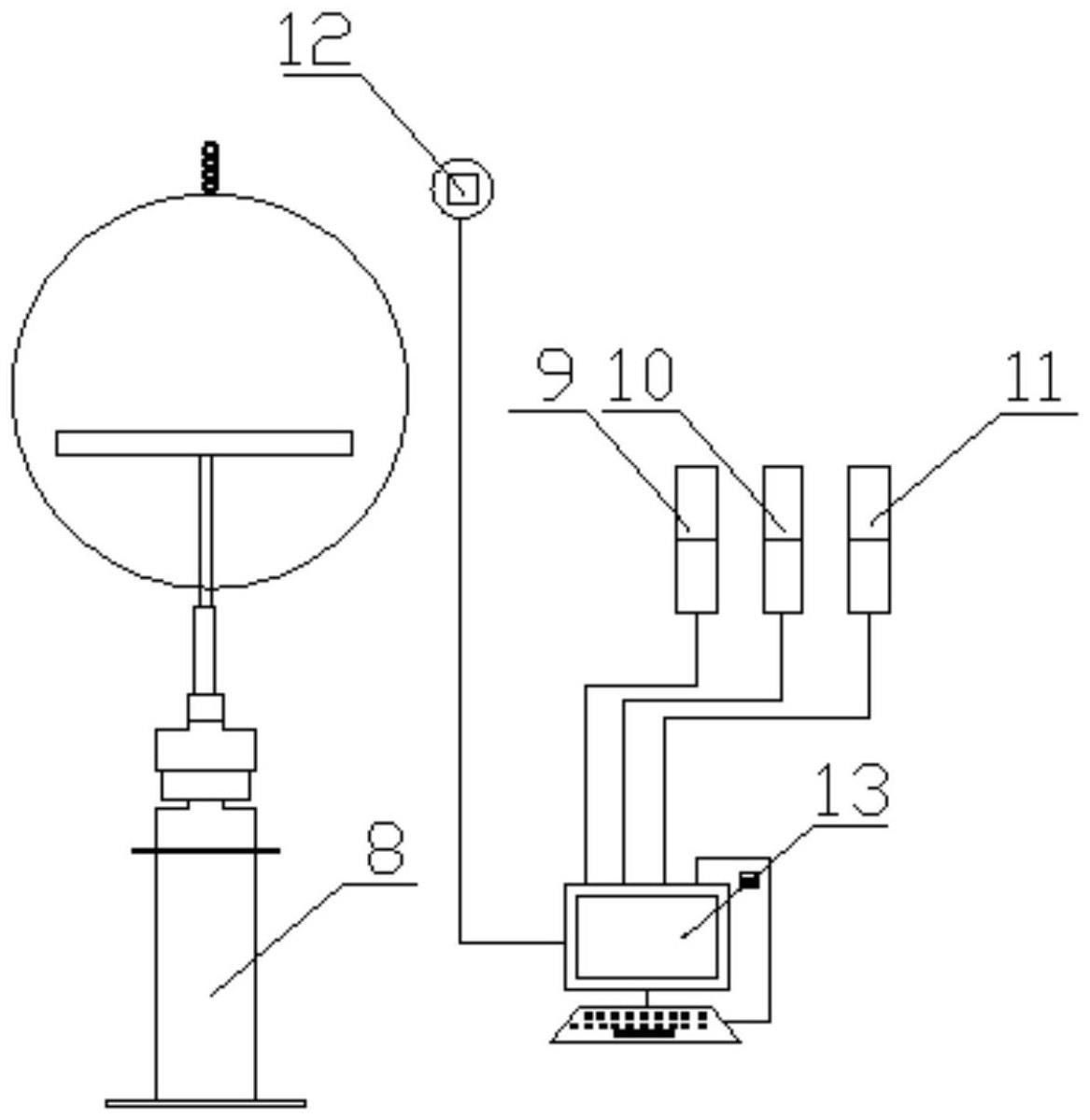
3、本发明公开的一种用于悬挂生产线的工件旋转定位系统,包括工件定位支撑机构、翻转气缸、旋转臂、转动定位机构、底座、感应装置和控制系统;
4、底座的一端固定,另一端通过所述转动定位机构与旋转臂连接,旋转臂与翻转气缸连接,翻转气缸与工件定位支撑机构连接;感应装置设在工件的输送方向上;翻转气缸、转动定位机构和感应装置分别与控制系统连接。
5、优选地,所述转动定位机构为机械臂。
6、优选地,所述转动定位机构包括90°旋转气缸、旋转气缸连接件和180°旋转气缸;180°旋转气缸的一端与底座连接,另一端通过旋转气缸连接件与90°旋转气缸连接,90°旋转气缸与工件定位支撑机构连接。
7、进一步优选地,翻转气缸、90°旋转气缸和180°旋转气缸分别通过电磁阀与控制系统连接。
8、优选地,工件定位支撑机构为薄钢板折弯件。
9、优选地,旋转臂上设有转动限位装置。
10、优选地,工件定位支撑机构与翻转气缸之间设有阻尼缓冲装置。
11、优选地,旋转臂的长度大于工件的回转半径。
12、优选地,感应装置为光电接近开关。
13、本发明公开的上述用于悬挂生产线的工件旋转定位系统的工作方法,包括
14、感应装置检测到工件后向控制系统发送信号,悬挂生产线停止工件的输送;翻转气缸带动工件定位支撑机构与工件固定,转动定位机构通过旋转臂带动工件进行多角度的旋转定位,对工件的每个平面进行相应的作业后,翻转气缸和转动定位机构将工件复位后,悬挂生产线继续工件的输送。
15、与现有技术相比,本发明具有以下有益的技术效果:
16、本发明公开的一种用于悬挂生产线的工件旋转定位系统,通过感应装置检测悬挂生产线上的工件,辅助翻转气缸和转动定位机构对工件的各个面进行自动化旋转定位,从而实现与自动化设备进行喷涂、焊接、装配等作业的配合。该系统解决了老旧流水线低成本的自动化改造,通用性好,有效提高了生产效率;同时,避免了部分有毒有害作业对人安全健康的影响,具有良好的应用前景。
17、进一步地,转动定位机构采用机械臂,适用于具有多个作业面的不规则形状工件。
18、进一步地,转动定位机构采用90°旋转气缸、旋转气缸连接件和180°旋转气缸组合的方式,适用于具有4个作业面的规则形状的工件,成本较低,维护方便。
19、进一步地,工件定位支撑机构采用薄钢板折弯件,成本低,能够根据工件的具体形状进行设计,适用性好。
20、进一步地,旋转臂上设有转动限位装置,避免转动角度过大。
21、进一步地,工件定位支撑机构与翻转气缸之间设有阻尼缓冲装置,避免工件对翻转气缸造成过大的冲击。
22、进一步地,旋转臂的长度大于工件的回转半径,保证能够实现工件的全方位旋转定位。
23、本发明公开的上述用于悬挂生产线的工件旋转定位系统的工作方法,自动化程度高,能够显著提高生产效率、降低生产成本,与现有的悬挂生产线兼容性好。
技术特征:
1.一种用于悬挂生产线的工件旋转定位系统,其特征在于,包括工件定位支撑机构(2)、翻转气缸(3)、旋转臂(4)、转动定位机构、底座(8)、感应装置(12)和控制系统(13);
2.根据权利要求1所述的用于悬挂生产线的工件旋转定位系统,其特征在于,所述转动定位机构为机械臂。
3.根据权利要求1所述的用于悬挂生产线的工件旋转定位系统,其特征在于,所述转动定位机构包括90°旋转气缸(5)、旋转气缸连接件(6)和180°旋转气缸(7);180°旋转气缸(7)的一端与底座(8)连接,另一端通过旋转气缸连接件(6)与90°旋转气缸(5)连接,90°旋转气缸(5)与工件定位支撑机构(2)连接。
4.根据权利要求3所述的用于悬挂生产线的工件旋转定位系统,其特征在于,翻转气缸(3)、90°旋转气缸(5)和180°旋转气缸(7)分别通过电磁阀与控制系统(13)连接。
5.根据权利要求1所述的用于悬挂生产线的工件旋转定位系统,其特征在于,工件定位支撑机构(2)为薄钢板折弯件。
6.根据权利要求1所述的用于悬挂生产线的工件旋转定位系统,其特征在于,旋转臂(4)上设有转动限位装置。
7.根据权利要求1所述的用于悬挂生产线的工件旋转定位系统,其特征在于,工件定位支撑机构(2)与翻转气缸(3)之间设有阻尼缓冲装置。
8.根据权利要求1所述的用于悬挂生产线的工件旋转定位系统,其特征在于,旋转臂(4)的长度大于工件(1)的回转半径。
9.根据权利要求1所述的用于悬挂生产线的工件旋转定位系统,其特征在于,感应装置(12)为光电接近开关。
10.权利要求1~9任意一项所述的用于悬挂生产线的工件旋转定位系统的工作方法,其特征在于,包括:
技术总结
本发明公开的一种用于悬挂生产线的工件旋转定位系统及其工作方法,属于产品制造技术领域。包括工件定位支撑机构、翻转气缸、旋转臂、转动定位机构、底座、感应装置和控制系统;底座的一端固定,另一端通过所述转动定位机构与旋转臂连接,旋转臂与翻转气缸连接,翻转气缸与工件定位支撑机构连接;感应装置设在工件的输送方向上;翻转气缸、转动定位机构和感应装置分别与控制系统连接。本发明能够实现工件在悬挂生产线流转过程中的自动旋转定位,高效地完成该道工序,自动化程度高,并有效降低生产成本。
技术研发人员:刘响亮,胡新元,李太江,刘园,汪贵明,任宁博,王少华,鲁刚,张辉,刘晓宏
受保护的技术使用者:西安热工研究院有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!