一种仓储系统的制作方法
本发明涉及仓储物流,尤其涉及一种仓储系统。
背景技术:
1、仓储系统的作业一般包括收货、存货、取货和发货等环节,为了完成上述作业任务,需要在仓储系统中设置存放货物的货架,以及运输货物的机器人,现有的仓储系统在仓储区域内,需要按照一定的规则设置多个货架区域,并在多个货架区域之间设置用于机器人行走的巷道,这种设置方式下,要求货架区域更科学合理,以便于多个机器人在货架之间行走。
2、基于此,在需要扩充货架时,需要综合考虑现有货架以及巷道的布局,相关技术中往往需要调整现有的货架区域划分方式,才能够做到更合理的布局,从而增加货架的扩充难度。
技术实现思路
1、本发明提供一种仓储系统,以解决现有技术中存在的在需要扩充货架时,需要综合考虑现有货架以及巷道的布局,才能够做到更合理的布局,从而增加货架的扩充难度的问题。
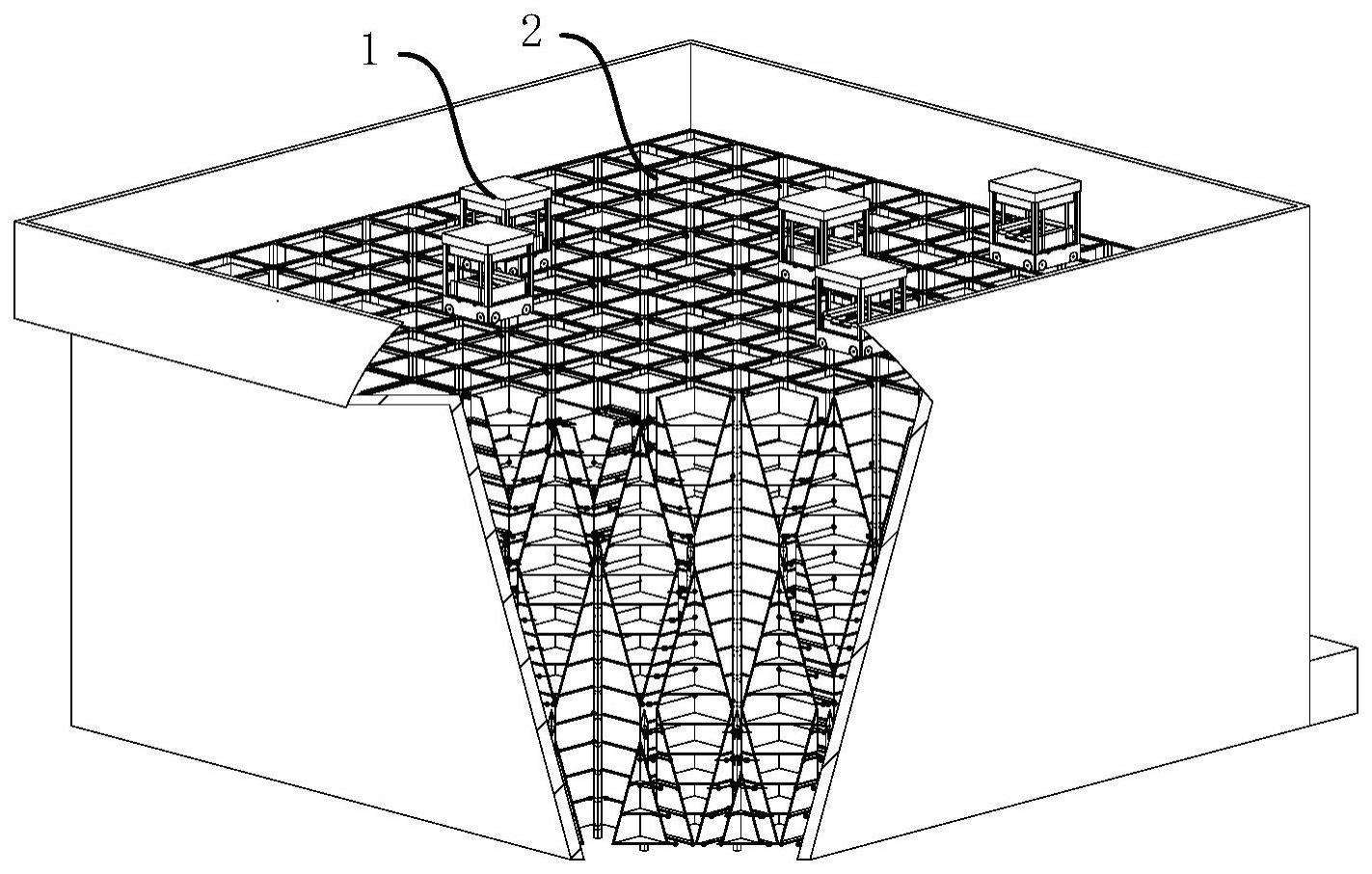
2、一种仓储系统,包括拣选机器人和至少一个存储单元,所述拣选机器人行走于所述存储单元沿高度方向的一侧;
3、所述存储单元包括供所述拣选机器人存取货物的拣选通道,以及至少一个货架,所述拣选通道沿所述货架的高度方向延伸,所述货架位于所述拣选通道垂直于延伸方向的一侧,所述货架包括沿高度方向依次设置的多层格口,且所述格口的出入口朝向所述拣选通道。
4、在一种实现方式中,每个所述存储单元包括多个货架,同一所述存储单元的多个货架绕所述拣选通道的周向间隔设置。
5、在一种实现方式中,所述存储单元的数量为多个,且同一所述存储单元上的相邻货架之间预留有填充位;
6、在多个所述存储单元组合时,所述填充位用于容纳相邻存储单元的货架。
7、在一种实现方式中,所述存储单元的顶部框架上设置有行走轨道;所述拣选机器人沿所述行走轨道行走于所述存储单元的顶部。
8、在一种实现方式中,所述拣选机器人包括供所述拣选机器人行走的行走部,以及,用于承载货箱本体的轿厢部;
9、所述行走部沿所述行走轨道行走于所述存储单元的顶部,所述轿厢部和所述行走部之间设置有升降装置,所述升降装置用于控制所述轿厢部相对于所述行走部在所述拣选通道内上升或下降。
10、在一种实现方式中,所述轿厢部和所述行走部之间还设置有旋转装置,所述旋转装置用于控制所述轿厢部在水平面内旋转,以使所述轿厢部上的货箱出入口朝向存放货箱对应的货架。
11、在一种实现方式中,所述旋转装置包括旋转电机,设置在所述行走部上的第一连接体,以及设置在所述轿厢部上的第二连接体;
12、在所述旋转电机工作时,所述第一连接体卡接所述第二连接体,以带动所述轿厢部相对于所述行走部旋转。
13、在一种实现方式中,所述行走部包括一组固定式的第一行走轮系,以及还包括一组可升降的第二行走轮系;
14、所述行走轨道包括第一行走轨道和第二行走轨道,所述第一行走轨道沿第一方向延伸,所述第二行走轨道沿第二方向延伸,所述第二行走轮系升起后,所述第一行走轮系卡接第一行走轨道,以实现所述行走部在所述第一方向上行走,所述第二行走轮系下降后,所述第二行走轮系卡接所述第二行走轨道,以实现所述行走部在所述第二方向上行走;所述第一方向与所述第二方向的方向不同。
15、在一种实现方式中,所述拣选通道内还设置有导向轨道,所述轿厢部还包括与所述导向轨道配合的导向滚轮。
16、在一种实现方式中,所述轿厢部还包括货箱传输装置和用于定位所述货箱的货箱定位装置;
17、所述货箱传输装置包括货箱抓手和传输皮带,所述货箱抓手用于将货箱抓取至货箱出入口处的所述传输皮带上,或将所述传输皮带上将货箱从货箱出入口处推出;
18、所述传输皮带用于将货箱从货箱出入口运输至货箱定位装置处,或将货箱从货箱定位装置处运输至货箱出入口。
19、在一种实现方式中,所述轿厢部还包括设置在所述轿厢部边缘的限位挡板,所述限位挡板用于限制所述货箱的位置。
20、在一种实现方式中,所述货架上设置有格口识别装置,以供所述拣选机器人识别格口的位置。
21、综上所述,本发明实施例提供一种仓储系统,包括拣选机器人和至少一个存储单元,所述拣选机器人行走于所述存储单元沿高度方向的一侧;所述存储单元包括供所述拣选机器人存取货物的拣选通道,以及至少一个货架,所述拣选通道沿所述货架的高度方向延伸,所述货架位于所述拣选通道垂直于延伸方向的一侧,所述货架包括沿高度方向依次设置的多层格口,且所述格口的出入口朝向所述拣选通道。
22、本发明提供的技术方案,通过在所述存储单元沿高度方向的一侧设置所述拣选机器人,避免在所述存储单元的周向位置,即在多个存储单元的情况下,避免在多个存储单元之间设置用于所述拣选机器人行走的行走通道,这样,在需要扩充所述存储单元时,可以直接将多个存储单元进行组合,不需要过多的考虑所述拣选机器人的行走通道,从而降低所述存储单元的扩充难度。
23、上述说明仅是本发明实施例技术方案的概述,为了能够更清楚了解本发明实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本发明实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种仓储系统,其特征在于,包括拣选机器人(1)和至少一个存储单元(2),所述拣选机器人(1)行走于所述存储单元(2)沿高度方向的一侧;
2.根据权利要求1所述的一种仓储系统,其特征在于,每个所述存储单元(2)包括多个货架(22),同一所述存储单元(2)的多个货架(22)绕所述拣选通道(21)的周向间隔设置。
3.根据权利要求2所述的一种仓储系统,其特征在于,所述存储单元(2)的数量为多个,且同一所述存储单元(2)上的相邻货架(22)之间预留有填充位(3);
4.根据权利要求1所述的仓储系统,其特征在于,所述存储单元(2)的顶部框架上设置有行走轨道;所述拣选机器人(1)沿所述行走轨道行走于所述存储单元(2)的顶部。
5.根据权利要求4所述的仓储系统,其特征在于,所述拣选机器人(1)包括供所述拣选机器人(1)行走的行走部(11),以及,用于承载货箱本体的轿厢部(12);
6.根据权利要求5所述的一种仓储系统,其特征在于,所述轿厢部(12)和所述行走部(11)之间还设置有旋转装置(14),所述旋转装置(14)用于控制所述轿厢部(12)在水平面内旋转,以使所述轿厢部(12)上的货箱出入口朝向存放货箱对应的货架(22)。
7.根据权利要求6所述的一种仓储系统,其特征在于,所述旋转装置(14)包括旋转电机(141),设置在所述行走部(11)上的第一连接体(142),以及设置在所述轿厢部(12)上的第二连接体(143);
8.根据权利要求5所述的一种仓储系统,其特征在于,所述行走部(11)包括一组固定式的第一行走轮系(111),以及还包括一组可升降的第二行走轮系(112);
9.根据权利要求5-7中任一项所述的一种仓储系统,其特征在于,所述拣选通道(21)内还设置有导向轨道,所述轿厢部(12)还包括与所述导向轨道配合的导向滚轮(123)。
10.根据权利要求5-7中任一项所述的一种仓储系统,其特征在于,所述轿厢部(12)还包括货箱传输装置(121)和用于定位所述货箱的货箱定位装置(122);
11.根据权利要求5-7中任一项所述的一种仓储系统,其特征在于,所述轿厢部(12)还包括设置在所述轿厢部(12)边缘的限位挡板(124),所述限位挡板(124)用于限制所述货箱的位置。
12.根据权利要求1-7中任一项所述的一种仓储系统,其特征在于,所述货架(22)上设置有格口识别装置,以供所述拣选机器人(1)识别格口(221)的位置。
技术总结
本发明涉及仓储物流技术领域,提供一种仓储系统,包括拣选机器人和至少一个存储单元,所述拣选机器人行走于所述存储单元沿高度方向的一侧;所述存储单元包括拣选通道以及至少一个货架,所述拣选通道沿所述货架的高度方向延伸,所述货架位于所述拣选通道垂直于延伸方向的一侧,所述货架包括沿高度方向依次设置的多层格口,且所述格口的出入口朝向所述拣选通道。本发明提供的技术方案,通过在所述存储单元沿高度方向的一侧设置所述拣选机器人,避免在所述存储单元的周向位置,这样,在需要扩充所述存储单元时,可以直接将多个存储单元进行组合,不需要过多的考虑所述拣选机器人的行走通道,从而降低所述存储单元的扩充难度。
技术研发人员:闫杰
受保护的技术使用者:南京极智嘉机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!