运输机器人的制作方法
本发明涉及运输,尤其涉及一种运输机器人。
背景技术:
1、随着贸易的蓬勃发展以及交通的日渐发达,集装箱由于其标准化的外观设计和易堆叠且结构稳固的特点,在物流运输中的使用频率越来越高。而现有技术中,集装箱的调运通常是通过采用大型吊车或者龙门吊的方式来进行。
2、但是在进行短程运输时,以及在运输作业空间较小的地方,大型吊车和龙门吊难以施展,在偏远地区,使用大型吊车或者龙门吊会导致成本的大量增加,这对于集装箱的短程运输而言非常不便,因此,需要提供一种便于短程运输和狭小空间内运输作业的集装箱运输工具。
技术实现思路
1、鉴于上述问题,本发明提供一种运输机器人,主要包括第一行走单元、悬架单元、第二行走单元和举升单元,占用空间较小,能够解决上述技术问题。
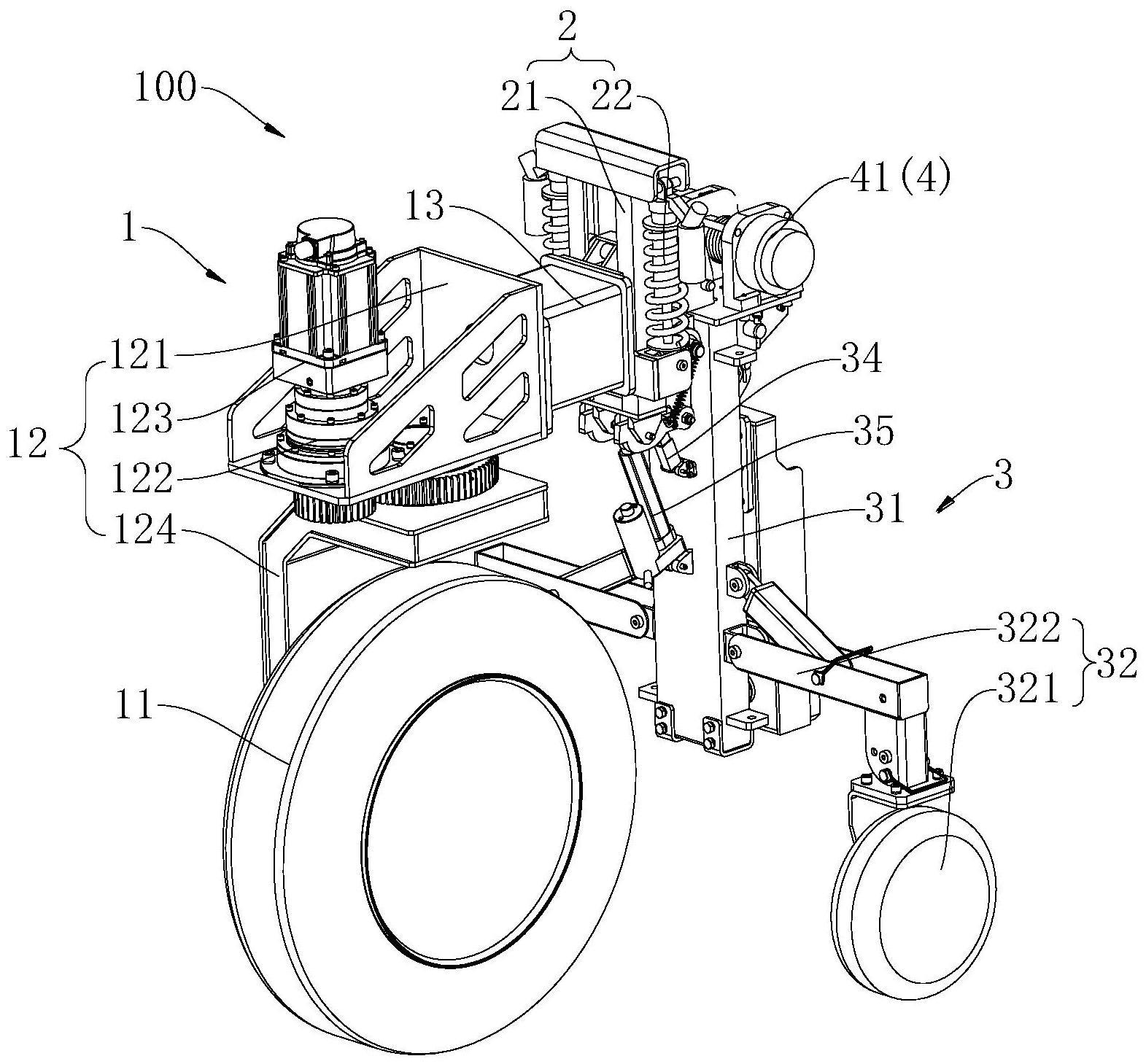
2、本发明提供一种运输机器人,包括:第一行走单元,所述第一行走单元包括第一行走轮、舵机组件和连接臂,其中,所述舵机组件与所述第一行走轮传动连接,以驱动所述第一行走轮转向,所述连接臂的第一端与所述舵机组件连接;悬架单元,所述悬架单元包括缓冲架组件,所述缓冲架组件包括缓冲座和滑移组件,所述滑移组件可运动地设于所述缓冲座,并与所述连接臂的第二端连接;第二行走单元,所述第二行走单元包括支柱和第二行走组件,其中,所述支柱与所述缓冲架组件连接,且所述支柱相对所述缓冲架组件的工作角度可调,所述第二行走组件设于所述支柱的底部且适于沿地面行走;举升单元,所述举升单元固定于所述支柱,所述举升单元用于举升待运输物。
3、根据本发明的运输机器人,主要包括第一行走单元、悬架单元、第二行走单元和举升单元,整体结构较为简单,且占用空间较小,更容易实现集装箱在短程和有限空间内的位置移动或运输,可以避免采用大型吊车或者龙门吊等运输方式对作业空间要求较大的问题,增加了集装箱运输的便利性,降低了运输成本。而通过将第二行走单元的支柱配置为工作角度可调整,有利于保证运输机器人在集装箱运输过程的姿态调整更加灵活,能够适应更加复杂多变的运输工况,提升了运输机器人运输能力。
4、根据本发明的一些实施例,所述缓冲座设有沿竖向延伸的滑槽,所述缓冲座与所述支柱枢转连接,所述滑移组件可滑动地设于所述滑槽;所述缓冲架组件还包括:避震器,所述避震器设于所述缓冲座的水平侧方,所述避震器的第一端与所述缓冲座连接,所述避震器的第二端与所述滑移组件连接。
5、在一些实施例中,所述缓冲座和所述支柱的彼此相对的一侧分别设有枢转座,两个所述枢转座分别形成有相对布置的枢转孔,所述缓冲座和所述支柱通过枢转轴依次穿过两个枢转孔实现连接,所述枢转轴沿水平方向延伸。
6、可选地,所述缓冲座的底部设有悬挂件,所述支柱朝向所述缓冲座的一侧还设有连接座,连接座与所述缓冲座抵接,所述第二行走单元还包括挂钩,所述挂钩的一端与所述连接座枢转连接,另一端与所述悬挂件勾连配合,所述挂钩的转动轴线与所述支柱的转动轴线平行。
7、可选地,所述悬挂件包括两个第一吊耳和悬挂销,两个所述第一吊耳设于所述缓冲座的底部且沿左右方向相对且间隔布置,所述悬挂销穿设于两个所述第一吊耳,所述挂钩与所述悬挂销勾连配合;或者,所述悬挂件为固定块,所述固定块开设有悬挂孔,所述挂钩与所述悬挂孔勾连配合。
8、可选地,所述第二行走单元还包括:第一推杆,所述第一推杆设于所述挂钩的下方,所述第一推杆具有固定部和伸缩部,所述固定部与所述支柱枢转连接,所述伸缩部与所述挂钩枢转连接,所述伸缩部被配置为在第一工作位置和第二工作位置之间移动,在所述第一工作位置时,所述挂钩与所述悬挂销或所述悬挂孔勾连配合,在所述第二工作位置时,所述挂钩与所述悬挂销分离,且所述挂钩的端部与所述缓冲座的底部沿竖直方向抵接。
9、根据本发明的一些实施例,所述第二行走单元还包括:弹性连接件,所述弹性连接件的一端与所述挂钩连接,另一端与所述支柱、所述缓冲座以及所述枢转座中的其中一个连接。
10、可选地,所述第二行走单元还包括:第二推杆,所述第二推杆设于第一推杆的下侧,所述第二推杆的一端与所述支柱枢转连接,另一端与所述缓冲座的底端枢转连接,所述第二推杆被配置为在所述伸缩部处于第二工作位置时伸出,以调整所述支柱的工作角度。
11、在一些实施例中,所述第二行走组件包括:收放支架,所述收放支架与所述支柱枢转连接;第二行走轮,所述第二行走轮与所述收放支架连接,以随所述收放支架收起或落下。
12、可选地,所述支柱的顶部设有安装座,所述举升单元包括:卷扬机、提升绳索和滑轮组件,所述卷扬机固定于所述安装座,所述滑轮组件包括至少一个滑轮,所述提升绳索可回收地绕设于所述卷扬机且与所述滑轮组件配合,所述提升绳索用于提升待运输物。
13、根据本发明的一些实施例,所述缓冲座包括座主体,所述座主体呈c型板,所述座主体的前侧开设有避让口,所述滑槽为设于所述避让口两侧的两个,所述滑移组件包括:滑移支架和滚轮,所述滑移支架包括滑动部和连接部,所述滑动部位于所述避让口,所述滚轮设于所述滑动部的两侧且与所述滑动部可转动连接,所述滚轮配合于所述滑槽内,所述连接部位于所述避让口的外侧且与所述连接臂的第二端连接。
14、可选地,所述滚轮包括第一滚轮和第二滚轮,其中,所述第一滚轮的滚动面与所述座主体沿左右方向的侧壁滚动配合,以对所述滑移组件限位,所述第二滚轮的滚动面与所述座主体的后壁滚动配合,以使所述滑移组件移动。
15、可选地,所述滑移组件还包括第二吊耳,所述第二吊耳分别与所述连接部和所述避震器的第二端连接,所述座主体上形成有与所述第二吊耳沿竖向相对布置的第三吊耳,所述第三吊耳与所述避震器的第一端连接。
16、可选地,所述滑槽的顶端敞开,所述缓冲座还包括限位挡板,所述限位挡板用于封堵所述滑槽的顶端并与所述座主体固定连接。
17、在一些实施例中,所述舵机组件包括:舵机座,所述舵机座位于所述第一行走轮的上侧,所述舵机座与所述连接臂的第一端连接;减速器,所述减速器设于所述舵机座,所述减速器的输出端具有第一齿轮;驱动电机,所述驱动电机的输出轴与所述减速器的输入端连接;转向架,所述转向架与所述第一行走轮连接,所述转向架上设有第二齿轮,所述第二齿轮与所述第一齿轮啮合传动,以在所述驱动电机的驱动下转向。
18、可选地,所述运输机器人还包括:功能模块,所述功能模块设于所述支柱,所述功能模块包括喷雾模块、牵引运输模块、叉臂模块中的至少一个。
技术特征:
1.一种运输机器人,其特征在于,包括:
2.根据权利要求1所述的运输机器人,其特征在于,所述缓冲座设有沿竖向延伸的滑槽,所述缓冲座与所述支柱枢转连接,所述滑移组件可滑动地设于所述滑槽;
3.根据权利要求2所述的运输机器人,其特征在于,所述缓冲座和所述支柱的彼此相对的一侧分别设有枢转座,两个所述枢转座分别形成有相对布置的枢转孔,所述缓冲座和所述支柱通过枢转轴依次穿过两个枢转孔实现连接,所述枢转轴沿水平方向延伸。
4.根据权利要求3所述的运输机器人,其特征在于,所述缓冲座的底部设有悬挂件,所述支柱朝向所述缓冲座的一侧还设有连接座,连接座与所述缓冲座抵接,所述第二行走单元还包括挂钩,所述挂钩的一端与所述连接座枢转连接,另一端与所述悬挂件勾连配合,所述挂钩的转动轴线与所述支柱的转动轴线平行。
5.根据权利要求4所述的运输机器人,其特征在于,所述悬挂件包括两个第一吊耳和悬挂销,两个所述第一吊耳设于所述缓冲座的底部且沿左右方向相对且间隔布置,所述悬挂销穿设于两个所述第一吊耳,所述挂钩与所述悬挂销勾连配合;
6.根据权利要求4或5所述的运输机器人,其特征在于,所述第二行走单元还包括:
7.根据权利要求6所述的运输机器人,其特征在于,所述第二行走单元还包括:
8.根据权利要求6所述的运输机器人,其特征在于,所述第二行走单元还包括:
9.根据权利要求1-5中任一项所述的运输机器人,其特征在于,所述第二行走组件包括:
10.根据权利要求1-5中任一项所述的运输机器人,其特征在于,所述支柱的顶部设有安装座,所述举升单元包括:卷扬机、提升绳索和滑轮组件,所述卷扬机固定于所述安装座,所述滑轮组件包括至少一个滑轮,所述提升绳索可回收地绕设于所述卷扬机且与所述滑轮组件配合,所述提升绳索用于提升待运输物。
11.根据权利要求2所述的运输机器人,其特征在于,所述缓冲座包括座主体,所述座主体呈c型板,所述座主体的前侧开设有避让口,所述滑槽为设于所述避让口两侧的两个,
12.根据权利要求11所述的运输机器人,其特征在于,所述滚轮包括第一滚轮和第二滚轮,其中,所述第一滚轮的滚动面与所述座主体沿左右方向的侧壁滚动配合,以对所述滑移组件限位,所述第二滚轮的滚动面与所述座主体的后壁滚动配合,以使所述滑移组件移动。
13.根据权利要求11所述的运输机器人,其特征在于,所述滑移组件还包括第二吊耳,所述第二吊耳分别与所述连接部和所述避震器的第二端连接,
14.根据权利要求11所述的运输机器人,其特征在于,所述滑槽的顶端敞开,所述缓冲座还包括限位挡板,所述限位挡板用于封堵所述滑槽的顶端并与所述座主体固定连接。
15.根据权利要求1所述的运输机器人,其特征在于,所述舵机组件包括:
16.根据权利要求1所述的运输机器人,其特征在于,还包括:功能模块,所述功能模块设于所述支柱,所述功能模块包括喷雾模块、牵引运输模块、叉臂模块中的至少一个。
技术总结
本发明提供一种运输机器人,包括:第一行走单元,包括第一行走轮、舵机组件和连接臂,其中,舵机组件与第一行走轮连接,连接臂的第一端与舵机组件连接;悬架单元,包括缓冲架组件,缓冲架组件包括缓冲座和滑移组件,滑移组件可运动地设于缓冲座,并与连接臂的第二端连接;第二行走单元,包括支柱和第二行走组件,其中,支柱与缓冲架组件连接,支柱相对缓冲架组件的工作角度可调,第二行走组件设于支柱且适于沿地面行走;举升单元,固定于支柱,举升单元用于举升待运输物。根据本发明的运输机器人,整体占用空间较小,可以避免采用大型吊车或者龙门吊等运输方式时对作业空间要求较大的问题,增加了运输的便利性。
技术研发人员:苏海峰,宋佳音,蔡扬
受保护的技术使用者:七海行(深圳)科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!