运输机器人的制作方法
本发明涉及机器人领域,尤其涉及一种运输机器人。
背景技术:
1、现有技术中,集装箱一般采用大型吊车或者龙门吊来进行吊装运输。
2、但是,在一些空间狭小的地方运输集装箱时,大型吊车或者龙门吊由于本身体积较大,往往难以展开进行作业。
技术实现思路
1、为了解决背景技术中提到的至少一个问题,本发明提供一种运输机器人,可以在空间相对狭小的地方运输集装箱。
2、为了实现上述目的,本发明提供如下技术方案:
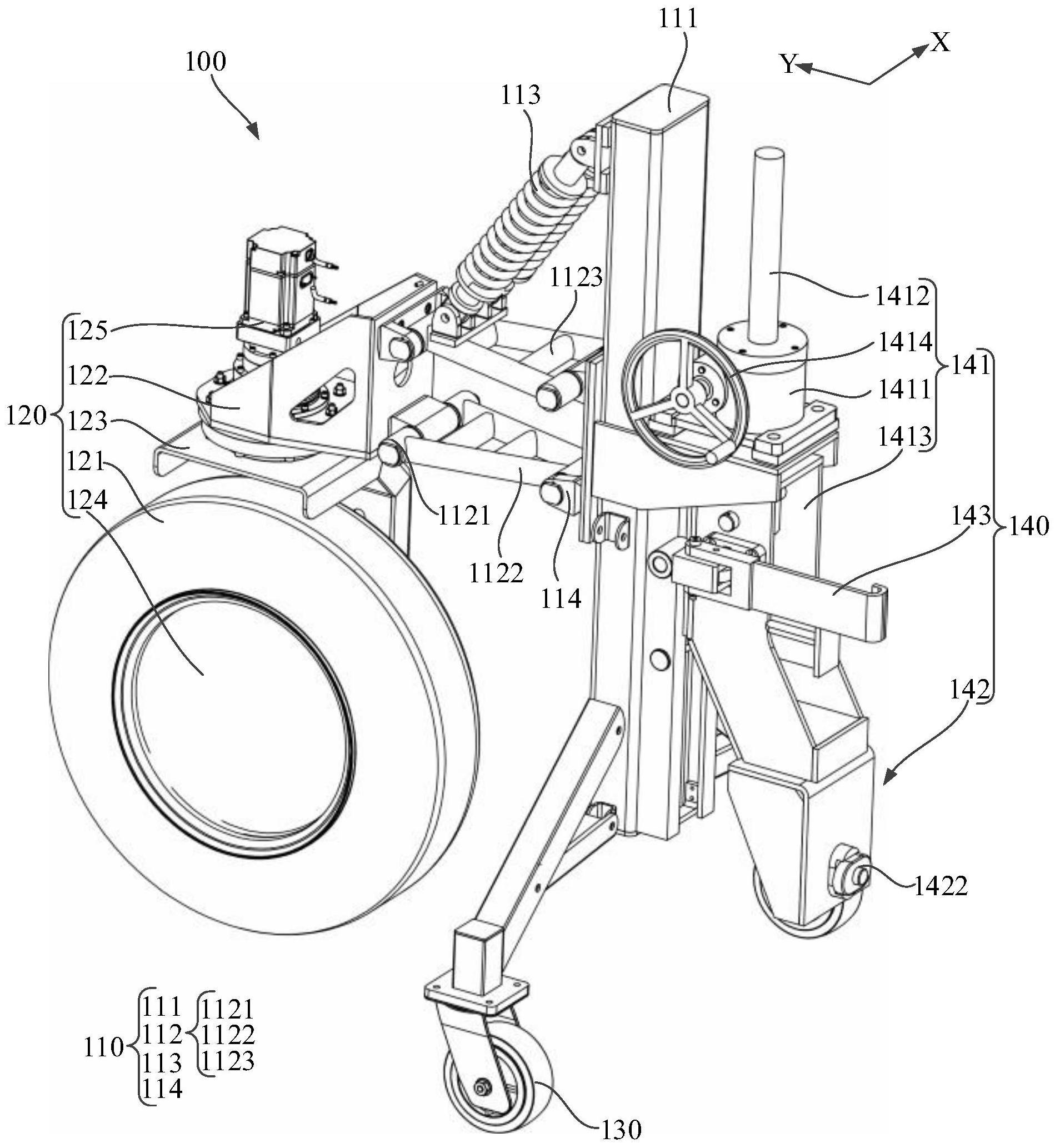
3、本发明提供一种运输机器人,包括机架组件、第一行走单元、第二行走单元以及连接组件;
4、机架组件包括主体架和悬架单元,主体架沿竖直方向延伸;
5、第一行走单元包括第一行走轮;第二行走单元包括两个第二行走轮,两个第二行走轮连接在主体架的底端;
6、悬架单元包括悬架和减震器,悬架的两端别分与主体架和第一行走单元铰接,减震器的两端分别与主体架和悬架铰接,或者,减震器的两端分别与第一行走单元和悬架铰接;
7、连接组件包括升降单元和锁紧单元,升降单元设置在主体架上,锁紧单元设置在升降单元的升降端,以通过升降单元带动锁紧单元沿着竖直方向做升降运动,锁紧单元被构造为将机器人与目标物体锁连在一起。
8、作为一种可选的实施方式,悬架具有两个,两个悬架沿竖直方向间隔设置。
9、作为一种可选的实施方式,悬架单元包括多个铰接座,多个铰接座设置在主体架和第一行走单元上,多个铰接座沿第一方向两两相对设置,铰接座上具有沿第二方向延伸的铰接通孔,悬架的两端包括沿第二方向延伸的铰接轴,铰接轴穿设在铰接通孔中。
10、作为一种可选的实施方式,悬架还包括至少两个连接杆和加固杆,至少两个连接杆间隔地连接在悬架两端的两个铰接轴之间,加固杆连接在连接杆之间,加固杆沿第二方向延伸。
11、作为一种可选的实施方式,升降单元包括丝杆升降机,丝杆升降机包括机体、丝杆和移动架,机体固定在主体架的背离第一行走单元的一侧,丝杆穿设在机体中,丝杆被配置为沿竖直方向升降移动,丝杆的底部与移动架固定连接,以通过丝杆带动移动架沿着竖直方向进行升降移动,锁紧单元设置在移动架的底端。
12、作为一种可选的实施方式,丝杆升降机还包括手动转盘、蜗杆以及蜗轮,手动转盘固定连接在蜗杆的一端,蜗杆沿第二方向延伸,蜗杆与蜗轮啮合在一起,蜗杆与蜗轮均穿设在机体中,蜗轮与丝杆传动连接,以通过手动转盘的转动带动丝杆沿竖直方向进行升降移动。
13、作为一种可选的实施方式,锁紧单元包括安装板、锁头和转动手柄,安装板设置在移动架的底端,转动手柄沿着第一方向可转动地穿设于安装板中,转动手柄的穿过安装板的端部与锁头连接,锁头被配置为与目标物体锁连在一起。
14、作为一种可选的实施方式,连接组件还包括抵紧机构,抵紧机构包括固定件、抵紧件以及拉动件,固定件固定设置在移动架上,抵紧件的第一端可转动地与固定件连接,抵紧件的第二端形成勾状的抵紧部,抵紧部用于抵紧在目标物体上,抵紧件的第一端还固定连接有拉动件,拉动件用于辅助抵紧件在水平面内转动。
15、作为一种可选的实施方式,第一行走单元还包括舵机座、安装架、驱动电机以及转向机构,悬架与舵机座铰接在一起,第一行走轮可转动地安装在安装架上,驱动电机设置在驱动轮上,驱动电机用于驱动第一行走轮转动,转向机构设置在舵机座与安装架之间,以通过转动机构控制第一行走轮的转向。
16、作为一种可选的实施方式,还包括运输拖车,运输拖车包括车架和车轮,车轮滚动连接于车架底部,车架用于装载运输货物,车架被构造为与锁紧单元锁连在一起。
17、作为一种可选的实施方式,还包括喷雾拖车,喷雾拖车包括喷雾单元和滚轮,滚轮可转动地设置于喷雾单元底部,喷雾单元用于将液体雾化后朝外喷出,喷雾拖车被构造为与锁紧单元锁连在一起。
18、作为一种可选的实施方式,还包括叉臂单元,叉臂单元包括连接板和至少两个间隔设置的货叉,连接板与锁紧单元锁连在一起,货叉的一端固定在连接板上,货叉用于装卸运输货物。
19、本发明提供的运输机器人包括机架组件、第一行走单元、第二行走单元以及连接组件;机架组件包括主体架和悬架单元,主体架沿竖直方向延伸;第一行走单元包括第一行走轮;第二行走单元包括两个第二行走轮,两个第二行走轮连接在主体架的底端;悬架单元包括悬架和减震器,悬架的两端别分与主体架和第一行走单元铰接,减震器的两端分别与主体架和悬架铰接,或者,减震器的两端分别与第一行走单元和悬架铰接;连接组件包括升降单元和锁紧单元,升降单元设置在主体架上,锁紧单元设置在升降单元的升降端,以通过升降单元带动锁紧单元沿着竖直方向做升降运动,锁紧单元被构造为将机器人与目标物体锁连在一起。其中,目标物体可以是集装箱,当在空间较为狭小的空间运输集装箱时,可以将多个本发明提供的运输机器人置于待运输的集装箱底部的四个角上,再通过锁紧单元将各个运输机器人与集装箱锁连在一起,机器人第一行走轮可以靠自身提供的动力转动,从而移动集装箱,升降单元则可以将锁紧单元以及与锁紧单元锁连在一起的集装箱抬升一定高度,方便集装箱的运输,铰接设置的悬架和减震器可以提高机器人的减震缓冲效果,使集装箱运输过程更加平稳,可以看出,本发明提供的运输机器人体积较小,在运输集装箱时,由于自身占据空间较小,极为合适在空间有限的地方或大型吊运器械不便到达的地方使用,且运输集装箱省时省力、成本较低。
技术特征:
1.一种运输机器人,其特征在于,包括机架组件、第一行走单元、第二行走单元以及连接组件;
2.根据权利要求1所述的运输机器人,其特征在于,所述悬架具有两个,两个所述悬架沿竖直方向间隔设置。
3.根据权利要求2所述的运输机器人,其特征在于,所述悬架单元包括多个铰接座,多个所述铰接座设置在所述主体架和所述第一行走单元上,多个所述铰接座沿第一方向两两相对设置,所述铰接座上具有沿第二方向延伸的铰接通孔,所述悬架的两端包括沿所述第二方向延伸的铰接轴,所述铰接轴穿设在所述铰接通孔中。
4.根据权利要求3所述的运输机器人,其特征在于,所述悬架还包括至少两个连接杆和加固杆,至少两个所述连接杆间隔地连接在所述悬架两端的两个铰接轴之间,所述加固杆连接在所述连接杆之间,所述加固杆沿所述第二方向延伸。
5.根据权利要求3或4所述的运输机器人,其特征在于,所述升降单元包括丝杆升降机,所述丝杆升降机包括机体、丝杆和移动架,所述机体固定在所述主体架的背离所述第一行走单元的一侧,所述丝杆穿设在所述机体中,所述丝杆被配置为沿竖直方向升降移动,所述丝杆的底部与所述移动架固定连接,以通过所述丝杆带动所述移动架沿着竖直方向进行升降移动,所述锁紧单元设置在所述移动架的底端。
6.根据权利要求5所述的运输机器人,其特征在于,所述丝杆升降机还包括手动转盘、蜗杆以及蜗轮,所述手动转盘固定连接在所述蜗杆的一端,所述蜗杆沿所述第二方向延伸,所述蜗杆与所述蜗轮啮合在一起,所述蜗杆与所述蜗轮均穿设在所述机体中,所述蜗轮与所述丝杆传动连接,以通过所述手动转盘的转动带动所述丝杆沿竖直方向进行升降移动。
7.根据权利要求6所述的运输机器人,其特征在于,所述锁紧单元包括安装板、锁头和转动手柄,所述安装板设置在所述移动架的底端,所述转动手柄沿着所述第一方向可转动地穿设于所述安装板中,所述转动手柄的穿过所述安装板的端部与所述锁头连接,所述锁头被配置为与所述目标物体锁连在一起。
8.根据权利要求7所述的运输机器人,其特征在于,所述连接组件还包括抵紧机构,所述抵紧机构包括固定件、抵紧件以及拉动件,所述固定件固定设置在所述移动架上,所述抵紧件的第一端可转动地与所述固定件连接,所述抵紧件的第二端形成勾状的抵紧部,所述抵紧部用于抵紧在所述目标物体上,所述抵紧件的第一端还固定连接有所述拉动件,所述拉动件用于辅助所述抵紧件在水平面内转动。
9.根据权利要求1-4任意一项所述的运输机器人,其特征在于,所述第一行走单元还包括舵机座、安装架、驱动电机以及转向机构,所述悬架与所述舵机座铰接在一起,所述第一行走轮可转动地安装在所述安装架上,所述驱动电机设置在所述驱动轮上,所述驱动电机用于驱动所述第一行走轮转动,所述转向机构设置在所述舵机座与所述安装架之间,以通过所述转动机构控制所述第一行走轮的转向。
10.根据权利要求1-4任意一项所述的运输机器人,其特征在于,还包括运输拖车,所述运输拖车包括车架和车轮,所述车轮滚动连接于所述车架底部,所述车架用于装载运输货物,所述车架被构造为与所述锁紧单元锁连在一起。
11.根据权利要求1-4任意一项所述的运输机器人,其特征在于,还包括喷雾拖车,所述喷雾拖车包括喷雾单元和滚轮,所述滚轮可转动地设置于所述喷雾单元底部,所述喷雾单元用于将液体雾化后朝外喷出,所述喷雾拖车被构造为与所述锁紧单元锁连在一起。
12.根据权利要求1-4任意一项所述的运输机器人,其特征在于,还包括叉臂单元,所述叉臂单元包括连接板和至少两个间隔设置的货叉,所述连接板与所述锁紧单元锁连在一起,所述货叉的一端固定在所述连接板上,所述货叉用于装卸运输货物。
技术总结
本发明提供一种运输机器人。本发明提供的运输机器人包括机架组件、第一行走单元、第二行走单元以及连接组件;机架组件包括主体架和悬架单元;第二行走单元包括两个第二行走轮,两个第二行走轮连接在主体架的底端;悬架单元包括悬架和减震器,悬架的两端别分与主体架和第一行走单元铰接,减震器的两端分别与主体架和悬架铰接,或者,减震器的两端分别与第一行走单元和悬架铰接;连接组件包括升降单元和锁紧单元,升降单元设置在主体架上,锁紧单元设置在升降单元的升降端,锁紧单元被构造为将机器人与目标物体锁连在一起。本发明提供一种运输机器人,可以在空间相对狭小的地方运输集装箱。
技术研发人员:苏海峰,宋佳音,蔡扬
受保护的技术使用者:七海行(深圳)科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!