一种基于电梯的障碍信息确定方法及装置与流程
本申请涉及机器人,尤其涉及一种基于电梯的障碍信息确定方法及装置。
背景技术:
1、电梯可以为机器人提供快速、安全、方便的垂直移动方式。机器人进入电梯可以快速到达需要的楼层,特别是在高层建筑物中,从而节省时间和成本。机器人可能需要占用大量的空间,而电梯可以使机器人快速进出建筑物,节省使用空间。机器人进入电梯可以让其进入到建筑物中的不同楼层,从而扩大了其工作范围。
2、但是,电梯内部的网络环境较差,可能导致机器人的通信和控制出现问题。由于电梯内部的混凝土墙壁和金属结构等可能会干扰无线信号,导致机器人的通信和控制失灵。而且由于电梯环境较为狭小,机器人进出电梯时,仅通过自身的传感器无法探测全部的障碍信息,进而可能导致机器人无法实现避障。
技术实现思路
1、有鉴于此,本申请实施例提供了一种基于电梯的障碍信息确定方法及装置,以解决现有技术中机器人进出电梯由于网络环境较差,所导致的机器人仅通过自身的传感器进行行驶,而无法避障的问题。
2、本申请实施例的第一方面,提供了一种基于电梯的障碍信息确定方法,包括:
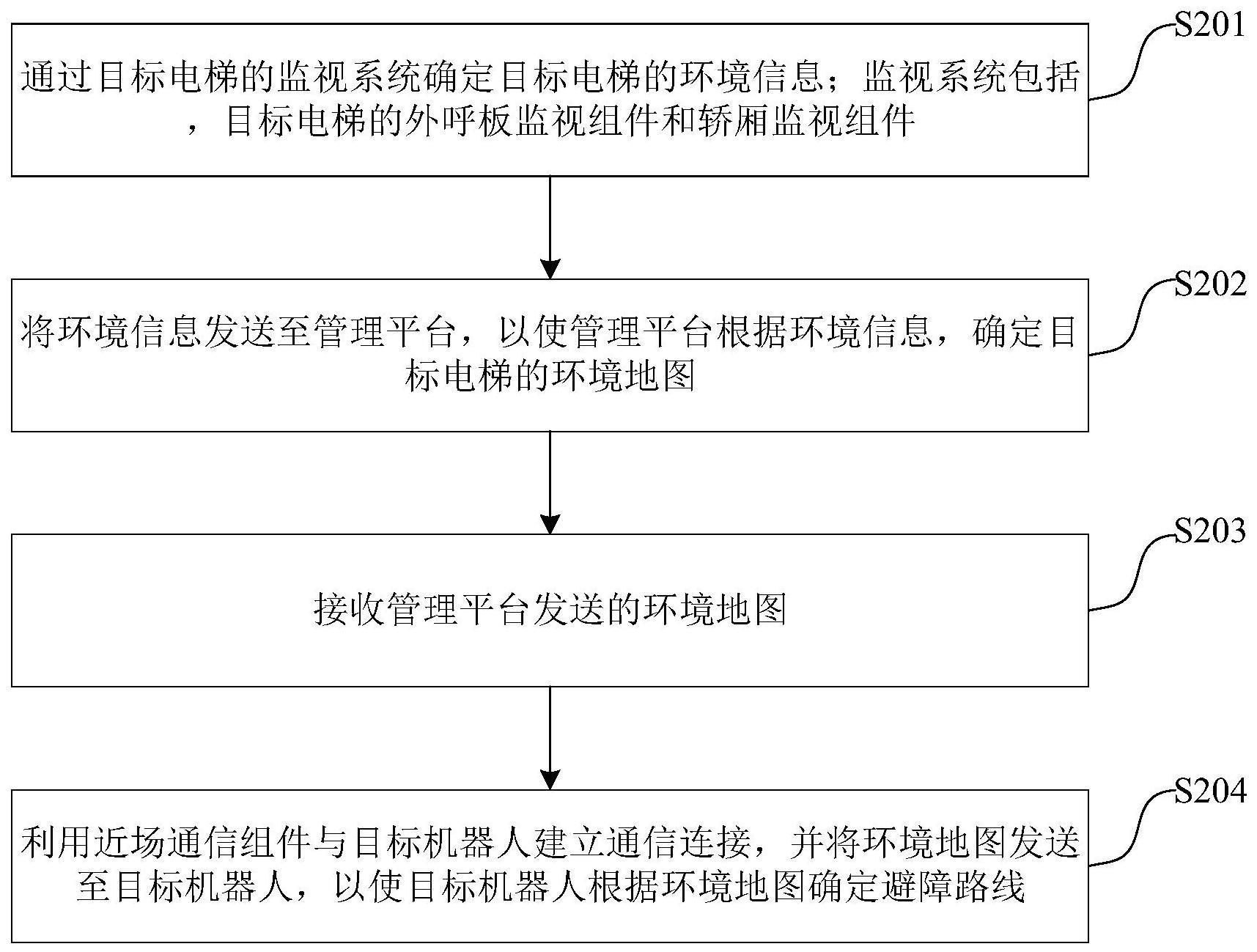
3、通过目标电梯的监视系统确定目标电梯的环境信息;监视系统包括,目标电梯的外呼板监视组件和轿厢监视组件;
4、将环境信息发送至管理平台,以使管理平台根据环境信息,确定目标电梯的环境地图;
5、接收管理平台发送的环境地图;
6、利用近场通信组件与目标机器人建立通信连接,并将环境地图发送至目标机器人,以使目标机器人根据环境地图确定避障路线。
7、本申请实施例的第二方面,提供了一种基于电梯的障碍信息确定装置,包括:
8、环境信息确定模块,被配置为通过目标电梯的监视系统确定目标电梯的环境信息;监视系统包括,目标电梯的外呼板监视组件和轿厢监视组件;
9、环境地图确定模块,被配置为将环境信息发送至管理平台,以使管理平台根据环境信息,确定目标电梯的环境地图;
10、环境地图接收模块,被配置为接收管理平台发送的环境地图;
11、避障路线确定模块,被配置为利用近场通信组件与目标机器人建立通信连接,并将环境地图发送至目标机器人,以使目标机器人根据环境地图确定避障路线。
12、本申请实施例的第三方面,提供了一种电子设备,包括存储器、处理器以及存储在存储器中并且可在处理器上运行的计算机程序,该处理器执行计算机程序时实现上述方法的步骤。
13、本申请实施例的第四方面,提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现上述方法的步骤。
14、本申请实施例与现有技术相比存在的有益效果是:通过目标电梯的监视系统确定目标电梯的环境信息;监视系统包括,目标电梯的外呼板监视组件和轿厢监视组件;将环境信息发送至管理平台,以使管理平台根据环境信息,确定目标电梯的环境地图;接收管理平台发送的环境地图;利用近场通信组件与目标机器人建立通信连接,并将环境地图发送至目标机器人,以使目标机器人根据环境地图确定避障路线。本申请实现了通过目标电梯利用近场通信组件与目标机器人建立通信连接,进而实现目标机器人的避障路线的规划,解决了目标机器人在电梯环境中,由于网络质量不佳时可能出现的无法避障的问题。
技术特征:
1.一种基于电梯的障碍信息确定方法,其特征在于,所述方法应用于目标电梯,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,当所述目标机器人准备进入所述目标电梯时,所述通过目标电梯的监视系统确定所述目标电梯的环境信息包括:
3.根据权利要求2所述的方法,其特征在于,所述管理平台根据所述环境信息,确定所述目标电梯的环境地图包括:
4.根据权利要求3所述的方法,其特征在于,所述目标机器人根据所述环境地图确定避障路线包括:
5.根据权利要求1所述的方法,其特征在于,当所述目标机器人准备离开所述目标电梯时,所述通过目标电梯的监视系统确定所述目标电梯的环境信息包括:
6.根据权利要求5所述的方法,其特征在于,所述管理平台根据所述环境信息,确定所述目标电梯的环境地图包括:
7.根据权利要求6所述的方法,其特征在于,所述目标机器人根据所述环境地图确定避障路线包括:
8.一种基于电梯的障碍信息确定装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器以及存储在所述存储器中并且可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述方法的步骤。
技术总结
本申请涉及机器人技术领域,提供了一种基于电梯的障碍信息确定方法及装置。该方法包括:通过目标电梯的监视系统确定目标电梯的环境信息;监视系统包括,目标电梯的外呼板监视组件和轿厢监视组件;将环境信息发送至管理平台,以使管理平台根据环境信息,确定目标电梯的环境地图;接收管理平台发送的环境地图;利用近场通信组件与目标机器人建立通信连接,并将环境地图发送至目标机器人,以使目标机器人根据环境地图确定避障路线。本申请实现了通过目标电梯利用近场通信组件与目标机器人建立通信连接,进而实现目标机器人的避障路线的规划,解决了目标机器人在电梯环境中,由于网络质量不佳时可能出现的无法避障的问题。
技术研发人员:李航,支涛
受保护的技术使用者:河南云迹智能技术有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!