一种基于计算机的工业运载机器人
本发明属于工业运载机器人,特别涉及一种基于计算机的工业运载机器人。
背景技术:
1、工业运载机器人是一种常见的工业机器人,其作用是搬运工业物料或设备。在生产实践中,有时需要搬运精密仪器。常规的工业运载机器人包括机械臂模块和运载模块,机械臂模块将仪器搬到运载模块上,运载模块将仪器运送到指定位置,机械臂模块再将仪器从运载模块上搬下来。精密仪器对运载模块的减震性能要求极高,现有的工业运载机器多采用常规的弹簧减震结构,在搬运较轻物件时,弹簧反馈弱,减震效果差,而搬运较重物件时,又容易超出弹簧的压缩极限,减震结构适用性差。而且,精密仪器需要轻拿轻放,常规的机械臂模块搬运仪器时往往会突然发力,而在放下仪器时,承载仪器的力瞬间从机械臂转移到承载面上,即使机械臂下降的速度再慢,也难免对仪器产生冲击,容易损伤仪器。
技术实现思路
1、本发明设计了一种基于计算机的工业运载机器人,目的在于解决现有工业运载机器人多采用常规的弹簧减震结构,在搬运较轻物件时,弹簧反馈弱,减震效果差,而搬运较重物件时,又容易超出弹簧的压缩极限,减震结构适用性差的问题,以及常规的机械臂模块搬运仪器时往往会突然发力,而在放下仪器时,承载仪器的力瞬间从机械臂转移到承载面上,难免对仪器产生冲击,容易损伤仪器的问题。
2、本发明解决上述技术问题所采用的技术方案是:
3、一种基于计算机的工业运载机器人,包括运载车模块和搬运模块,运载车模块包括车体,搬运模块包括机械臂,机械臂包括竖直臂,竖直臂下端与车体可旋转连接。竖直臂包括外臂和内臂,外臂底部与车体可旋转连接,外臂上方为开放结构。内臂部分或全部位于外臂内,内臂的外侧壁与外臂的内侧壁密封滑动接触。内臂的中部设置有液室,液室与外臂内的空间连通。液室内设置有弹性储气部件,弹性储气部件内存储有气体。液室上端与机械臂的其他部分连接。外臂内侧的下部连通有供液管路和排液管路,能够向外臂内提供高压液体以及将外臂内的高压液体排出。
4、进一步,液室的周围对称设置有多个第一减震组件,第一减震组件包括第一套筒和第一活塞,第一套筒固定于液室上,第一活塞一端位于第一套筒内,另一端与外臂的内侧壁接触。第一活塞与第一套筒内侧壁滑动密封接触,并且在第一套筒内封存有液体。第一减震组件分为上下两圈且相对于内臂的中心线两两对称,上下两圈第一减震组件也互相对称。上圈的每个第一套筒通过管道与对称位置的下圈的第一套筒连通。液室与内臂之间设置有多个弹簧。液室下部与内臂之间安装有柔性密封片。
5、进一步,每组互相连接的第一套筒均通过节流阀与液室连通。
6、进一步,竖直臂上端固定有水平臂,水平臂可伸缩,末端安装有竖直升降臂,竖直升降臂能够相对水平臂竖直滑动。
7、进一步,机械臂的末端连接有双铰接组件,双铰接组件下方连接有双滑轨组件,双滑轨组件的下方连接有固定组件;固定组件用于固定待运载物件;双铰接组件包括两个互相垂直的铰接轴,使得双滑轨组件、固定组件以及固定的物件能够绕两个铰接轴在两个互相垂直的维度上旋转;双铰接组件位于不发生旋转的初始位置时,两个铰接轴的轴线均水平;双滑轨组件包括两个互相垂直的滑轨,在双铰接组件位于初始位置时,两个滑轨均水平;通过两个滑轨,控制下方的固定组件以及固定的物件在两个滑轨所在的平面内移动;双铰接组件为被动动作组件,双滑轨组件为主动动作组件。
8、进一步,双铰接组件和双滑轨组件均位于初始位置时,两个滑轨分别与两个铰接轴的轴线平行,每个滑轨仅跟随与之垂直的铰接轴的旋转而滑动,即任意铰接轴发生旋转皆只触发对应的滑轨发生滑动,进而调整该维度上的重心偏移。
9、进一步,搬运模块上设置有重力传感器,用于检测搬运物件的重力。
10、进一步,运载车模块包括车体,车体中部开设有内腔;内腔中设置有装载箱,装载箱顶部为开放结构;装载箱与内腔之间设置有多个第二减震组件,分布于装载箱的底部和侧面;第二减震组件包括第二套筒和第二活塞,第二活塞与第二套筒配合,与第二套筒内壁滑动密封接触;第二套筒与装载箱相对固定,第二活塞与内腔壁相对可滑动接触;装载箱的每个侧面设置有一组或多组第二减震组件,每组第二减震组件均通过流道与位于装载箱对面的一组第二减震组件连通,每个流道均流经装载箱的下方,且连通有一个或多个装载箱下方的第二减震组件;每个流道内均封存有液体,每组第二减震组件处的流道内均封存有与液体不相容的气体,且液位至少低于最上方的第二减震组件的第二套筒。
11、进一步,车体的顶部设置有闭合组件,用于控制内腔上方的开启和关闭。
12、进一步,每组第二减震组件处的流道上均设置有压力传感器接口和补气口。
13、与现有技术相比,本发明至少具有如下有益效果:
14、本发明能够使得仪器在被搬起时以及卸载时缓慢改变受力状态,解决了常规的机械臂模块搬运仪器时往往会突然发力,而在放下仪器时,承载仪器的力瞬间从机械臂转移到承载面上,难免对仪器产生冲击,容易损伤仪器的问题。
15、本发明的搬运模块利用双铰接组件寻找仪器的重心位置,利用双滑轨组件将仪器的重心调整到机械臂末端的中心,能够将物件搬运至装载箱的中间位置,避免由于不同的仪器重心位置不同而导致运载模块运送仪器时减震系统发生倾斜,降低减震系统的性能,甚至损坏仪器。
16、本发明的减震系统能够使得各第二减震组件的抗压性与搬运物件的重力相匹配,解决了现有工业运载机器人多采用常规的弹簧减震结构,在搬运较轻物件时,弹簧反馈弱,减震效果差,而搬运较重物件时,又容易超出弹簧的压缩极限,减震结构适用性差的问题。
17、本发明不论受到任何方向的震动,各第二减震组件都不会发生快速反弹,从而避免对物件造成二次伤害。
技术特征:
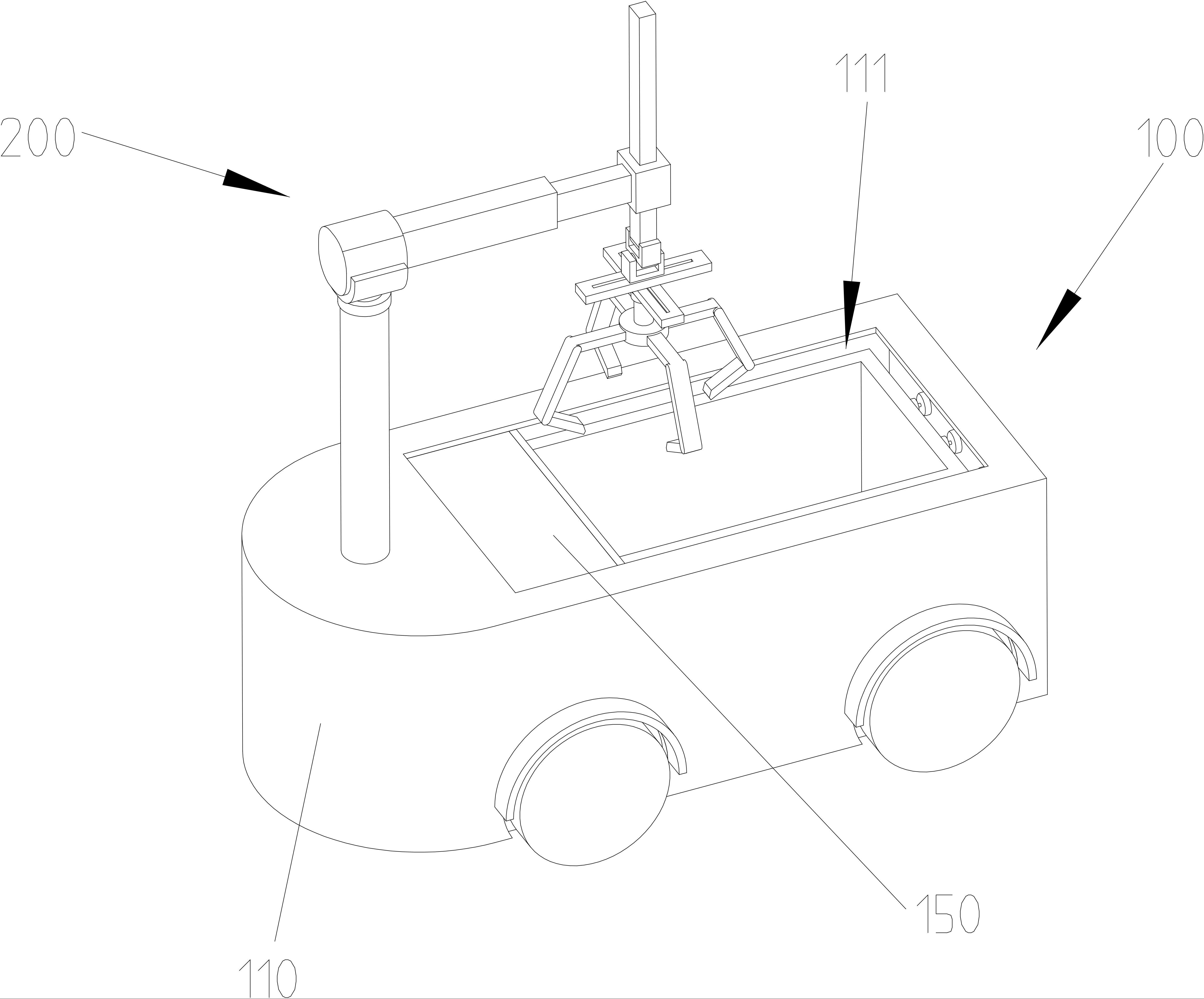
1.一种基于计算机的工业运载机器人,包括运载车模块(100)和搬运模块(200),其特征在于,所述运载车模块(100)包括车体(110),所述搬运模块(200)包括机械臂(210),所述机械臂(210)包括竖直臂(211),所述竖直臂(211)下端与所述车体(110)可旋转连接;所述竖直臂(211)包括外臂(310)和内臂(320),所述外臂(310)底部与所述车体(110)可旋转连接,所述外臂(310)上方为开放结构;所述内臂(320)部分或全部位于所述外臂(310)内,所述内臂(320)的外侧壁与所述外臂(310)的内侧壁密封滑动接触;所述内臂(320)的中部设置有液室(330),所述液室(330)与所述外臂(310)内的空间连通;所述液室(330)内设置有弹性储气部件(331),所述弹性储气部件(331)内存储有气体;所述液室(330)上端与所述机械臂(210)的其他部分连接;所述外臂(310)内侧的下部连通有供液管路(311)和排液管路(312),能够向所述外臂(310)内提供高压液体以及将所述外臂(310)内的高压液体排出。
2.根据权利要求1所述的基于计算机的工业运载机器人,其特征在于,所述液室(330)的周围对称设置有多个第一减震组件(340),所述第一减震组件(340)包括第一套筒(341)和第一活塞(342),所述第一套筒(341)固定于所述液室(330)上,所述第一活塞(342)一端位于所述第一套筒(341)内,另一端与所述外臂(310)的内侧壁接触;所述第一活塞(342)与所述第一套筒(341)内侧壁滑动密封接触,并且在所述第一套筒(341)内封存有液体;所述第一减震组件(340)分为上下两圈且相对于所述内臂(320)的中心线两两对称,上下两圈所述第一减震组件(340)也互相对称;上圈的每个所述第一套筒(341)通过管道与对称位置的下圈的所述第一套筒(341)连通;所述液室(330)与所述内臂(320)之间设置有多个弹簧(350);所述液室(330)下部与所述内臂(320)之间安装有柔性密封片(360)。
3.根据权利要求2所述的基于计算机的工业运载机器人,其特征在于,每组互相连接的所述第一套筒(341)均通过节流阀(370)与所述液室(330)连通。
4.根据权利要求1所述的基于计算机的工业运载机器人,其特征在于,所述竖直臂(211)上端固定有水平臂(212),所述水平臂(212)可伸缩,末端安装有竖直升降臂(213),所述竖直升降臂(213)能够相对水平臂(212)竖直滑动。
5.根据权利要求1所述的基于计算机的工业运载机器人,其特征在于,所述机械臂(210)的末端连接有双铰接组件(220),所述双铰接组件(220)下方连接有双滑轨组件(230),所述双滑轨组件(230)的下方连接有固定组件(240);所述固定组件(240)用于固定待运载物件;所述双铰接组件(220)包括两个互相垂直的铰接轴(221),使得所述双滑轨组件(230)、所述固定组件(240)以及固定的物件能够绕两个所述铰接轴(221)在两个互相垂直的维度上旋转;所述双铰接组件(220)位于不发生旋转的初始位置时,两个所述铰接轴(221)的轴线均水平;所述双滑轨组件(230)包括两个互相垂直的滑轨(231),在所述双铰接组件(220)位于初始位置时,两个所述滑轨(231)均水平;通过两个所述滑轨(231),控制下方的所述固定组件(240)以及固定的物件在两个所述滑轨(231)所在的平面内移动;所述双铰接组件(220)为被动动作组件,所述双滑轨组件(230)为主动动作组件。
6.根据权利要求5所述的基于计算机的工业运载机器人,其特征在于,所述双铰接组件(220)和所述双滑轨组件(230)均位于初始位置时,两个所述滑轨(231)分别与两个所述铰接轴(221)的轴线平行,每个所述滑轨(231)仅跟随与之垂直的所述铰接轴(221)的旋转而滑动,即任意所述铰接轴(221)发生旋转皆只触发对应的所述滑轨(231)发生滑动,进而调整该维度上的重心偏移。
7.根据权利要求5所述的基于计算机的工业运载机器人,其特征在于,所述搬运模块(200)上设置有重力传感器,用于检测搬运物件的重力。
8.根据权利要求1所述的基于计算机的工业运载机器人,其特征在于,所述运载车模块(100)包括所述车体(110),所述车体(110)中部开设有内腔(111);所述内腔(111)中设置有装载箱(120),所述装载箱(120)顶部为开放结构;所述装载箱(120)与所述内腔(111)之间设置有多个第二减震组件(130),分布于所述装载箱(120)的底部和侧面;所述第二减震组件(130)包括第二套筒(131)和第二活塞(132),所述第二活塞(132)与所述第二套筒(131)配合,与所述第二套筒(131)内壁滑动密封接触;所述第二套筒(131)与所述装载箱(120)相对固定,所述第二活塞(132)与所述内腔(111)壁相对可滑动接触;所述装载箱(120)的每个侧面设置有一组或多组所述第二减震组件(130),每组所述第二减震组件(130)均通过流道(140)与位于所述装载箱(120)对面的一组所述第二减震组件(130)连通,每个所述流道(140)均流经所述装载箱(120)的下方,且连通有一个或多个所述装载箱(120)下方的所述第二减震组件(130);每个所述流道(140)内均封存有液体,每组所述第二减震组件(130)处的所述流道(140)内均封存有与液体不相容的气体,且液位至少低于最上方的所述第二减震组件(130)的第二套筒(131)。
9.根据权利要求8所述的基于计算机的工业运载机器人,其特征在于,所述车体(110)的顶部设置有闭合组件(150),用于控制所述内腔(111)上方的开启和关闭。
10.根据权利要求8所述的基于计算机的工业运载机器人,其特征在于,每组所述第二减震组件(130)处的所述流道(140)上均设置有压力传感器接口(160)和补气口(170)。
技术总结
本发明属于工业运载机器人技术领域,具体公开了一种基于计算机的工业运载机器人,包括运载车模块和搬运模块,运载车模块包括车体,搬运模块包括机械臂,机械臂包括竖直臂,竖直臂包括外臂和内臂,外臂底部与车体可旋转连接。内臂的中部设置有液室,液室与外臂内的空间连通。液室内设置有弹性储气部件,弹性储气部件内存储有气体。液室上端与机械臂的其他部分连接。外臂内侧的下部连通有供液管路和排液管路。本发明解决了现有工业运载机器人使用常规的机械臂模块搬运仪器时往往会突然发力,而在放下仪器时,承载仪器的力瞬间从机械臂转移到承载面上,难免对仪器产生冲击,容易损伤仪器的问题。
技术研发人员:王国辉
受保护的技术使用者:中国农业大学烟台研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!