一种可自动识别上仓的换仓机器人的制作方法
本发明属于换仓机器人,具体的说是一种可自动识别上仓的换仓机器人。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,换仓机器人能够通过编程和自动控制来执行更换货物的操作。
2、现有技术中的换仓机器人通过电脑编程进行移动到指定位置,对仓架进行抬起移动,使货物到指定位置后通过工人进行分拣,分拣后换仓机器人再将仓架进行移动下一个工序。
3、目前现有技术中,换仓机器人可以对仓架进行移动,不需要工人对仓架进行移动,可以提高工人的效率,但仓架上分拣有大量的货物,需要工人进行分拣和排序,换仓机器人不能对单个货物进行精准的移动输送,需要工人进行分拣操作后进行移动输送。
技术实现思路
1、为了解决上述换仓机器人不能对单个货物进行精准的移动输送问题,本发明提出的一种可自动识别上仓的换仓机器人。
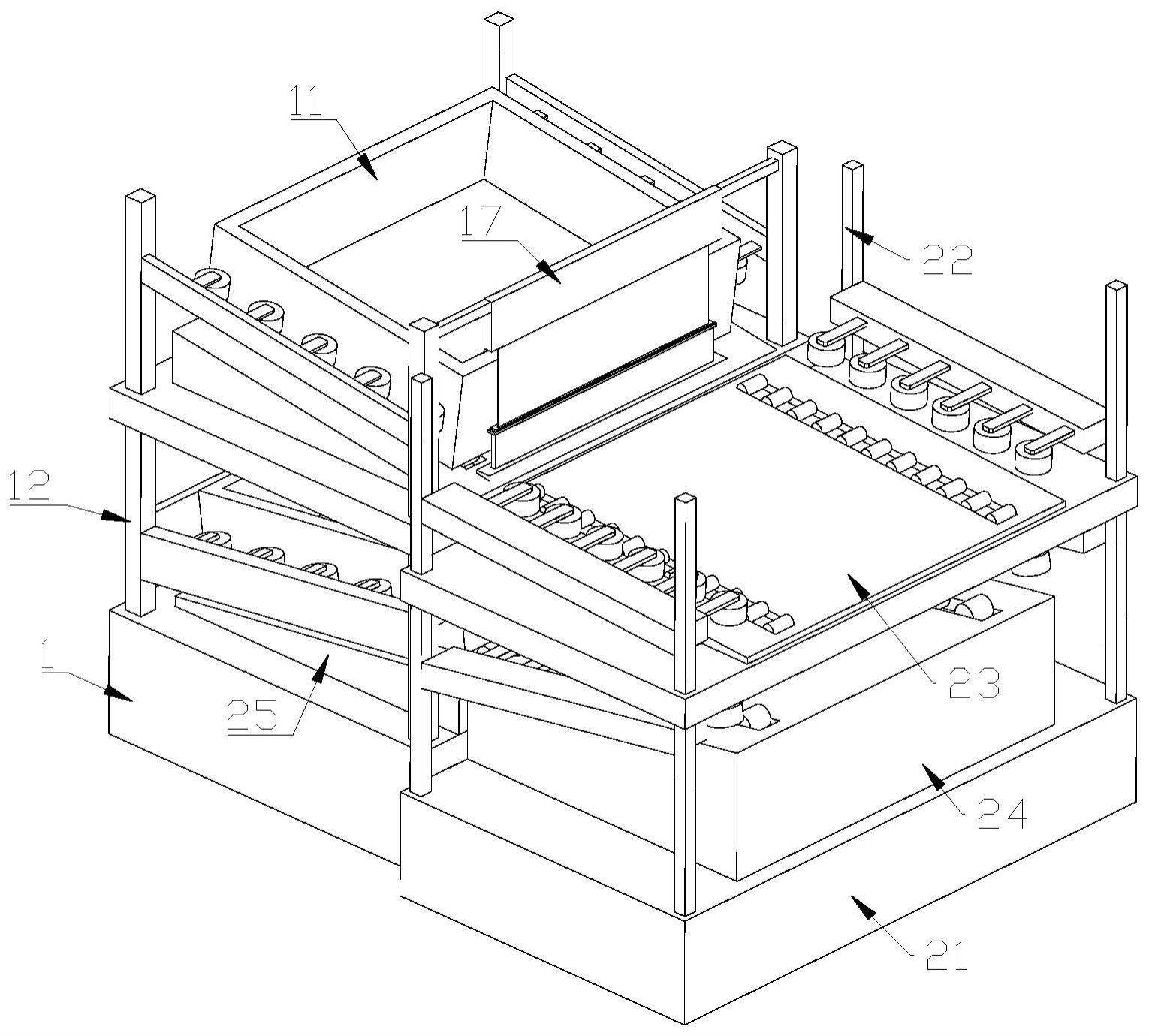
2、本发明解决其技术问题所采用的技术方案是:本发明所述的一种可自动识别上仓的换仓机器人,包括换仓机器人体、仓盒、第一架体、第一导板、第一滚轮、对接仓架、第二架体和第二导板;其中,所述换仓机器人体的顶端固接有所述第一架体;所述第一架体上固接有所述第一导板;所述第一导板的内部转动连接有多组所述第一滚轮;所述第一导板上安装所述仓盒;所述换仓机器人体的侧端设有所述对接仓架;所述对接仓架的顶端固接有所述第二架体;所述第二架体上固接有所述第二导板。
3、可选的,所述换仓机器人体的顶端固接有所述第二对接板;所述对接仓架的顶端固接有所述第一对接板;所述第二对接板的一侧设有所述第一对接板。
4、可选的,所述第二对接板的内部安装气杆;所述气杆的一端固接有推板;所述第一对接板的内部开设有推槽;所述推槽的内部转动连接有旋转杆;所述旋转杆的一端固接有所述第一转动板;所述旋转杆的另一端固接有所述第二转动板。
5、可选的,所述第一导板的内部固接有电动推杆;所述电动推杆的顶端固接有限位挡板。
6、可选的,所述第一架体的一端固接有固位板;所述固位板侧端转动连接有多组第二滚轮,第二滚轮一侧安装有仓盒。
7、可选的,所述第一架体的一端固接有所述限位壳;所述限位壳的内部滑动连接有所述限位布;所述限位壳的内部安装有弹性绳,弹性绳的底端连接有所述限位布。
8、可选的,所述限位布的底端固接有所述第一磁铁板;所述限位挡板的顶端固接有所述第二磁铁板。
9、可选的,所述换仓机器人体的侧端固接有所述第一电磁铁;所述对接仓架的侧端固接有所述第二电磁铁,第二电磁铁与第一电磁铁相对应。
10、可选的,所述第二对接板的内部滑动连接有所述连接板,第一对接板的侧端连接有连接板。
11、可选的,所述第二对接板的内部安装复位弹簧;所述复位弹簧的侧端固接有所述连接板。
12、本发明的有益效果是:本发明提供一种可自动识别上仓的换仓机器人,通过换仓机器人体将仓盒移动至指定的对接仓架一侧处,仓盒通过第一导板与第一滚轮的配合移动至第二导板上,仓盒通过第二导板移动至下一个工序,从而完成对仓盒的对接换仓操作,可以对货物一对一的进行换仓,不需要工人进行分拣换仓,从而提高货物的换仓工作效率。
13、进一步的,本发明提供一种可自动识别上仓的换仓机器人,通过换仓机器人体移动至对接仓架一侧时,换仓机器人体启动气杆进行滑动,气杆的滑动从而使推板滑动至推槽内,此时换仓机器人体进行移动使推板滑动,推板在推槽的内部滑动可以对第一转动板推动,从而使第一转动板发生转动,第一转动板的转动进而使第二转动板转动,第一对接板的内部安装有需要换仓的仓盒,第一对接板上的仓盒被第二转动板阻挡,第二转动板被第一转动板转动后,第一对接板上的仓盒顺着斜坡向第二对接板上滑动,仓盒滑动至第二对接板上后。
技术特征:
1.一种可自动识别上仓的换仓机器人,其特征在于:包括换仓机器人体(1)、仓盒(11)、第一架体(12)、第一导板(13)、第一滚轮(14)、对接仓架(21)、第二架体(22)和第二导板(23);
2.根据权利要求1所述的一种可自动识别上仓的换仓机器人,其特征在于:所述换仓机器人体(1)的顶端固接有所述第二对接板(25);所述对接仓架(21)的顶端固接有所述第一对接板(24);所述第二对接板(25)的一侧设有所述第一对接板(24)。
3.根据权利要求2所述的一种可自动识别上仓的换仓机器人,其特征在于:所述第二对接板(25)的内部安装气杆(28);所述气杆(28)的一端固接有推板(29);所述第一对接板(24)的内部开设有推槽(33);所述推槽(33)的内部转动连接有旋转杆(30);所述旋转杆(30)的一端固接有所述第一转动板(31);所述旋转杆(30)的另一端固接有所述第二转动板(32)。
4.根据权利要求3所述的一种可自动识别上仓的换仓机器人,其特征在于:所述第一导板(13)的内部固接有电动推杆(20);所述电动推杆(20)的顶端固接有限位挡板(19)。
5.根据权利要求4所述的一种可自动识别上仓的换仓机器人,其特征在于:所述第一架体(12)的一端固接有固位板(15);所述固位板(15)侧端转动连接有多组第二滚轮(16),第二滚轮(16)一侧安装有仓盒(11)。
6.根据权利要求5所述的一种可自动识别上仓的换仓机器人,其特征在于:所述第一架体(12)的一端固接有所述限位壳(17);所述限位壳(17)的内部滑动连接有所述限位布(18);所述限位壳(17)的内部安装有弹性绳,弹性绳的底端连接有所述限位布(18)。
7.根据权利要求6所述的一种可自动识别上仓的换仓机器人,其特征在于:所述限位布(18)的底端固接有所述第一磁铁板;所述限位挡板(19)的顶端固接有所述第二磁铁板。
8.根据权利要求7所述的一种可自动识别上仓的换仓机器人,其特征在于:所述换仓机器人体(1)的侧端固接有所述第一电磁铁(26);所述对接仓架(21)的侧端固接有所述第二电磁铁(27),第二电磁铁(27)与第一电磁铁(26)相对应。
9.根据权利要求8所述的一种可自动识别上仓的换仓机器人,其特征在于:所述第二对接板(25)的内部滑动连接有所述连接板(34),第一对接板(24)的侧端连接有连接板(34)。
10.根据权利要求9所述的一种可自动识别上仓的换仓机器人,其特征在于:所述第二对接板(25)的内部安装复位弹簧;所述复位弹簧的侧端固接有所述连接板(34)。
技术总结
本发明属于换仓机器人技术领域,具体的说是一种可自动识别上仓的换仓机器人,包括换仓机器人体、仓盒、第一架体、第一导板、第一滚轮、对接仓架、第二架体和第二导板;其中,所述换仓机器人体的顶端固接有所述第一架体;所述第一架体上固接有所述第一导板;所述第一导板的内部转动连接有多组所述第一滚轮;通过换仓机器人体将仓盒移动至指定的对接仓架一侧处,仓盒通过第一导板与第一滚轮的配合移动至第二导板上,仓盒通过第二导板移动至下一个工序,从而完成对仓盒的对接换仓操作,可以对货物一对一的进行换仓,不需要工人进行分拣换仓,从而提高货物的换仓工作效率。
技术研发人员:赵博学,支涛
受保护的技术使用者:河南云迹智能技术有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!