一种光模块自动测试机器人的制作方法
本发明属于光模块测试领域,具体涉及一种光模块自动测试机器人。
背景技术:
1、光模块是光通信设备中的核心器件,在设备中起到光电信号相互转换的作用。光模块在完成生产后还必须要进行测试,只有所有的参数都达到要求才可以保证光模块的质量。目前的测试工作都是人工操作,人工测试光模块的工作效率比较低下,而且测试精度也不高,难以适应大批量的光模块高速检测,故有待改进。
技术实现思路
1、为解决现有技术中存在的不足,本发明的目的在于提供一种光模块自动测试机器人,设计合理,克服了现有技术的不足,具有良好的效果。
2、为解决上述技术问题,本发明所采取的技术方案如下:
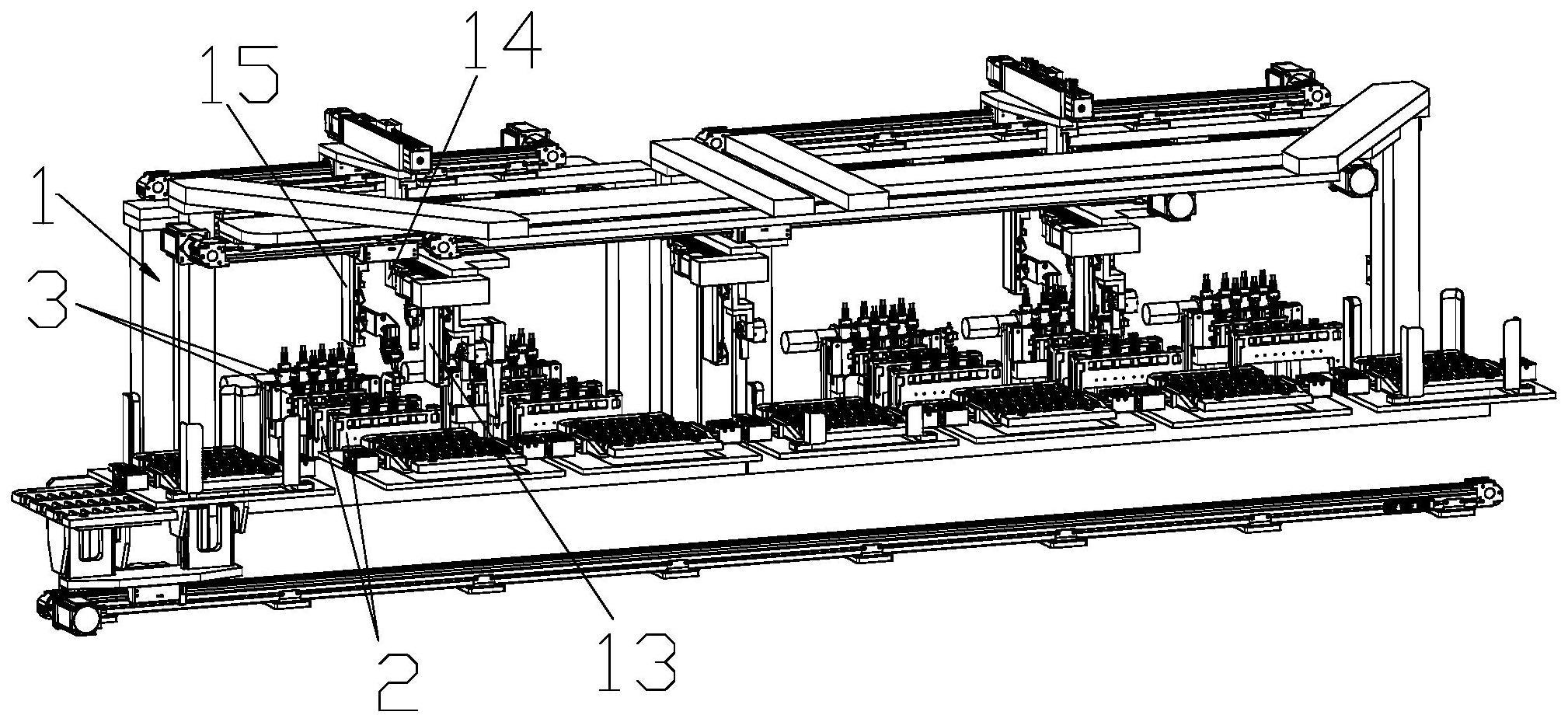
3、一种光模块自动测试机器人,包括机架、周转单元、预上电单元、测试单元以及光纤单元,所述周转单元包括第一电机、x向导轨和顶升机构,导轨上方设有提取机构、放置机构和收集机构,所述第一电机驱动顶升机构带动吸塑盒沿导轨移动到提取机构、放置机构或收集机构下方,实现吸塑盒的提取、放置或收集;
4、吸塑盒内水平放置有多个光模块,机架上沿y向设有预上电板和测试板;所述预上电单元通过第一机械手将放置机构中的光模块移动到预上电板,用于对光模块进行预上电,所述测试单位通过第二机械手将光模块从预上电板移动到测试板,所述光纤单元通过第三机械手先将光纤移动到清洁机构进行光纤端面的清洁,然后通过显微镜判断是否清洁合格,最后移动到测试板并插入到光模块上,从而进行光模块的测试。
5、进一步地,所述周转单元中,导轨与顶升机构滑动连接,导轨上方间隔设有一个提取机构、三个放置机构和两个收集机构,其中第一放置机构用于放置装有待测试光模块的吸塑盒,第二放置机构用于放置装有不合格光模块的吸塑盒,第三放置机构用于放置装有合格光模块的吸塑盒;提取机构用于堆叠装有待测试光模块的吸塑盒,第一收集机构用于堆叠装有不合格光模块的吸塑盒,第二收集机构用于堆叠装有合格光模块的吸塑盒。
6、进一步地,所述顶升机构包括并排设置的第一顶升气缸和第二顶升气缸,所述第一和第二顶升气缸均为双行程气缸,其顶部的伸缩杆固定连接有托盘,托盘用于承载吸塑盒;所述提取机构、放置机构和收集机构均包括中间设有开口的放置板,第一顶升气缸或第二顶升气缸驱动吸塑盒能够穿过所述开口上下移动,放置板上设有两个相对的抱紧气缸,抱紧气缸的伸缩杆固定连接有托板,当抱紧气缸驱动托板向开口方向伸出时,托板能够托载住吸塑盒。
7、进一步地,在预上电单元中,所述第一机械手包括三维模组移动机构和固定在其底部的第一旋转气缸,所述第一旋转气缸的旋转轴固定有第一平行手指气缸,所述第一平行手指气缸的两个手指用于夹取吸塑盒中的光模块,第一旋转气缸驱动第一平行手指气缸使光模块在竖直面上旋转90°,三维模组移动机构使光模块竖直插入到预上电板中。
8、进一步地,在测试单元中,所述第二机械手包括三维模组移动机构和固定在其底部的第二旋转气缸,所述第二旋转气缸的旋转轴固定有沿y向延伸的旋转长板,所述旋转长板两端分别固定有第二平行手指气缸,距离预上电板较近一端的第二平行手指气缸用于夹取预上电板中的光模块,第二旋转气缸驱动旋转长板在水平面上旋转180°,三维模组移动机构驱动旋转长板继续移动一定距离,使光模块竖直插入到测试板中。
9、进一步地,在光纤单元中,所述第三机械手包括三维模组移动机构和固定在其底部的第三平行手指气缸,所述第三平行手指气缸驱动光纤完成从光纤板到清洁机构、显微镜及测试板的移动,所述清洁机构设有清洁布,用于清洁光纤端面,所述显微镜用于检测光纤端面是否清洁干净。
10、进一步地,所述三维模组移动机构包括设置在机架上的x轴组件、y轴组件和z轴组件,所述x组件包括第二电机和通过电机驱动的传送带,所述y轴组件通过滑块与传送带固定连接,其包括第三电机和通过电机驱动的第一丝杠,所述z轴组件通过滑块与第一丝杠固定连接,其包括第四电机和第二丝杠,所述第一旋转气缸、第二旋转气缸和第三平行手指气缸分别通过滑块与对应的第二丝杠固定连接。
11、本发明的有益效果在于,与现有技术相比,本发明采用机械手实现光模块的自动化测试,工作人员只需将待测试模块摆放至吸塑盒中及回收已完成测试的模块,并进行分类,提供预上电功能,减少模块测试等待时间,多机械手配合作业,节约上下料时间,使用本发明降低人为因素造成的测试差异,提高效率。
技术特征:
1.一种光模块自动测试机器人,其特征在于,包括机架、周转单元、预上电单元、测试单元以及光纤单元,所述周转单元包括第一电机、x向导轨和顶升机构,导轨上方设有提取机构、放置机构和收集机构,所述第一电机驱动顶升机构带动吸塑盒沿导轨移动到提取机构、放置机构或收集机构下方,实现吸塑盒的提取、放置或收集;
2.根据权利要求1所述的一种光模块自动测试机器人,其特征在于,所述周转单元中,导轨与顶升机构滑动连接,导轨上方间隔设有一个提取机构、三个放置机构和两个收集机构,其中第一放置机构用于放置装有待测试光模块的吸塑盒,第二放置机构用于放置装有不合格光模块的吸塑盒,第三放置机构用于放置装有合格光模块的吸塑盒;提取机构用于堆叠装有待测试光模块的吸塑盒,第一收集机构用于堆叠装有不合格光模块的吸塑盒,第二收集机构用于堆叠装有合格光模块的吸塑盒。
3.根据权利要求2所述的一种光模块自动测试机器人,其特征在于,所述顶升机构包括并排设置的第一顶升气缸和第二顶升气缸,所述第一和第二顶升气缸均为双行程气缸,其顶部的伸缩杆固定连接有托盘,托盘用于承载吸塑盒;所述提取机构、放置机构和收集机构均包括中间设有开口的放置板,第一顶升气缸或第二顶升气缸驱动吸塑盒能够穿过所述开口上下移动,放置板上设有两个相对的抱紧气缸,抱紧气缸的伸缩杆固定连接有托板,当抱紧气缸驱动托板向开口方向伸出时,托板能够托载住吸塑盒。
4.根据权利要求1所述的一种光模块自动测试机器人,其特征在于,在预上电单元中,所述第一机械手包括三维模组移动机构和固定在其底部的第一旋转气缸,所述第一旋转气缸的旋转轴固定有第一平行手指气缸,所述第一平行手指气缸的两个手指用于夹取吸塑盒中的光模块,第一旋转气缸驱动第一平行手指气缸使光模块在竖直面上旋转90°,三维模组移动机构使光模块竖直插入到预上电板中。
5.根据权利要求4所述的一种光模块自动测试机器人,其特征在于,在测试单元中,所述第二机械手包括三维模组移动机构和固定在其底部的第二旋转气缸,所述第二旋转气缸的旋转轴固定有沿y向延伸的旋转长板,所述旋转长板两端分别固定有第二平行手指气缸,距离预上电板较近一端的第二平行手指气缸用于夹取预上电板中的光模块,第二旋转气缸驱动旋转长板在水平面上旋转180°,三维模组移动机构驱动旋转长板继续移动一定距离,使光模块竖直插入到测试板中。
6.根据权利要求5所述的一种光模块自动测试机器人,其特征在于,在光纤单元中,所述第三机械手包括三维模组移动机构和固定在其底部的第三平行手指气缸,所述第三平行手指气缸驱动光纤完成从光纤板到清洁机构、显微镜及测试板的移动,所述清洁机构设有清洁布,用于清洁光纤端面,所述显微镜用于检测光纤端面是否清洁干净。
7.根据权利要求6所述的一种光模块自动测试机器人,其特征在于,所述三维模组移动机构包括设置在机架上的x轴组件、y轴组件和z轴组件,所述x组件包括第二电机和通过电机驱动的传送带,所述y轴组件通过滑块与传送带固定连接,其包括第三电机和通过电机驱动的第一丝杠,所述z轴组件通过滑块与第一丝杠固定连接,其包括第四电机和第二丝杠,所述第一旋转气缸、第二旋转气缸和第三平行手指气缸分别通过滑块与对应的第二丝杠固定连接。
技术总结
本发明公开了一种光模块自动测试机器人,属于光模块测试领域,包括机架、周转单元、预上电单元、测试单元以及光纤单元,周转单元包括电机、导轨和顶升机构,导轨上方设有提取机构、放置机构和收集机构,顶升机构用于实现吸塑盒的提取、放置或收集,吸塑盒内水平放置有多个光模块;预上电单元通过第一机械手将放置机构中的光模块移动到预上电板,测试单位通过第二机械手将光模块从预上电板移动到测试板。本发明采用机械手实现光模块的自动化测试,工作人员只需将待测试光模块摆放至吸塑盒中及回收已完成测试的模块,提供预上电功能,减少模块测试等待时间,多机械手配合作业,节约上下料时间,使用本发明降低人为因素造成的测试差异,提高效率。
技术研发人员:刘金华,王若愚,苏庆,袁丁,周素梅
受保护的技术使用者:青岛正相清科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!