一种装卸机器人的制作方法
本发明涉及机器人,尤其涉及一种装卸机器人。
背景技术:
1、随着人力成本逐年上升,越来越多的企业开始采用装卸机器人代替人力来完成货物的搬运与转移操作,装卸机器人可以替代人类进行各种不同形状的工件拆卸及搬运工作,大大减轻了人类的体力劳动,显著的提高劳动生产力。目前使用的装卸机器人一般是通过车轮或者履带进行驱动,当装卸机器人的伸缩臂需要在不同方向上进行工作时,往往需要车轮或者履带带动车体进行转向,灵活性比较差。
技术实现思路
1、本发明旨在至少解决上述所提及的技术问题之一,提供一种装卸机器人,转向灵活,方便伸缩臂在不同方向上进行装卸操作。
2、为了实现上述目的,本发明采用的技术方案为:一种装卸机器人,包括车体,以及设置在车体上的行走机构和装卸机构,装卸机构包括伸缩臂、安装座、固定架、回转驱动机构和第一驱动装置,安装座与车体通过回转驱动机构转动连接,回转驱动机构能够驱动安装座在水平方向上实现360°转动,伸缩臂的底端与安装座铰接配合,第一驱动装置能够驱动伸缩臂绕铰接处转动,固定架设置在伸缩臂的上端,且固定架上可拆卸的安装有用于装卸货物的属具。
3、优选的,所述回转驱动机构包括回转支承和蜗杆驱动装置,回转支承的外圈与安装座底部固定连接,回转支承的内圈与车体固定连接,外圈设置具有与蜗杆驱动装置传动配合的啮合部。
4、优选的,所述固定架与伸缩臂的端部铰接,固定架上连接有第二驱动装置,第二驱动装置能够驱动固定架绕铰接处转动。
5、优选的,所述属具为货叉装置,货叉装置包括安装架以及设置在安装架上两个货叉臂,安装架与固定架可拆卸连接。
6、优选的,所述安装架与固定架之间通过回转驱动机构连接,以使得安装架能够相对固定架360°转动。
7、优选的,所述货叉臂通过滑座与安装架滑动连接,且滑座连接有第三驱动装置,第三驱动装置能够驱动两滑座相互朝向或者相互背向运动,以调节两货叉臂之间的距离。
8、优选的,所述货叉臂的端部通过轴体与滑座转动连接,且滑座上设置有定位孔,货叉臂的端部环绕轴体均布设置有若干调节孔,调节孔能够与定位孔对应,通过定位销插入调节孔和定位孔,能够将货叉臂锁定在滑座上。
9、优选的,所述伸缩臂包括大臂、中臂、小臂,大臂的一端与车体铰接,另一端与中臂的一端插接配合,小臂的一端与中臂远离大臂的一端插接配合,另一端安装有固定架,大臂与中臂,以及中臂与小臂之间分别通过油缸连接。
10、优选的,所述行走结构为履带式行走机构。
11、优选的,车体包括左车架、右车架、底板和第四驱动装置,左车架和右车架上均设置有滑轴,底板的底部设置有滑套,滑轴与滑套能够相互插接且滑动配合,第四驱动装置能够驱动滑轴沿滑套滑动,以调节左车架与右车架之间的距离,回转驱动机构设置在底板上。
12、有益效果是:与现有技术相比,本发明的一种装卸机器人通过将伸缩臂安装在安装座上,且安装座与车体通过回转驱动机构转动连接,使得伸缩臂能够能够实现水平方向上实现360°转动,使得装卸货物时无需车轮或者履带带动车体进行转向,转向灵活,方便在不同方向上进行装卸操作,同时通过采用伸缩臂进行货物的装载,能够根据需要调节伸缩臂的长度,以满足不同高度下的多种装载需求。
技术特征:
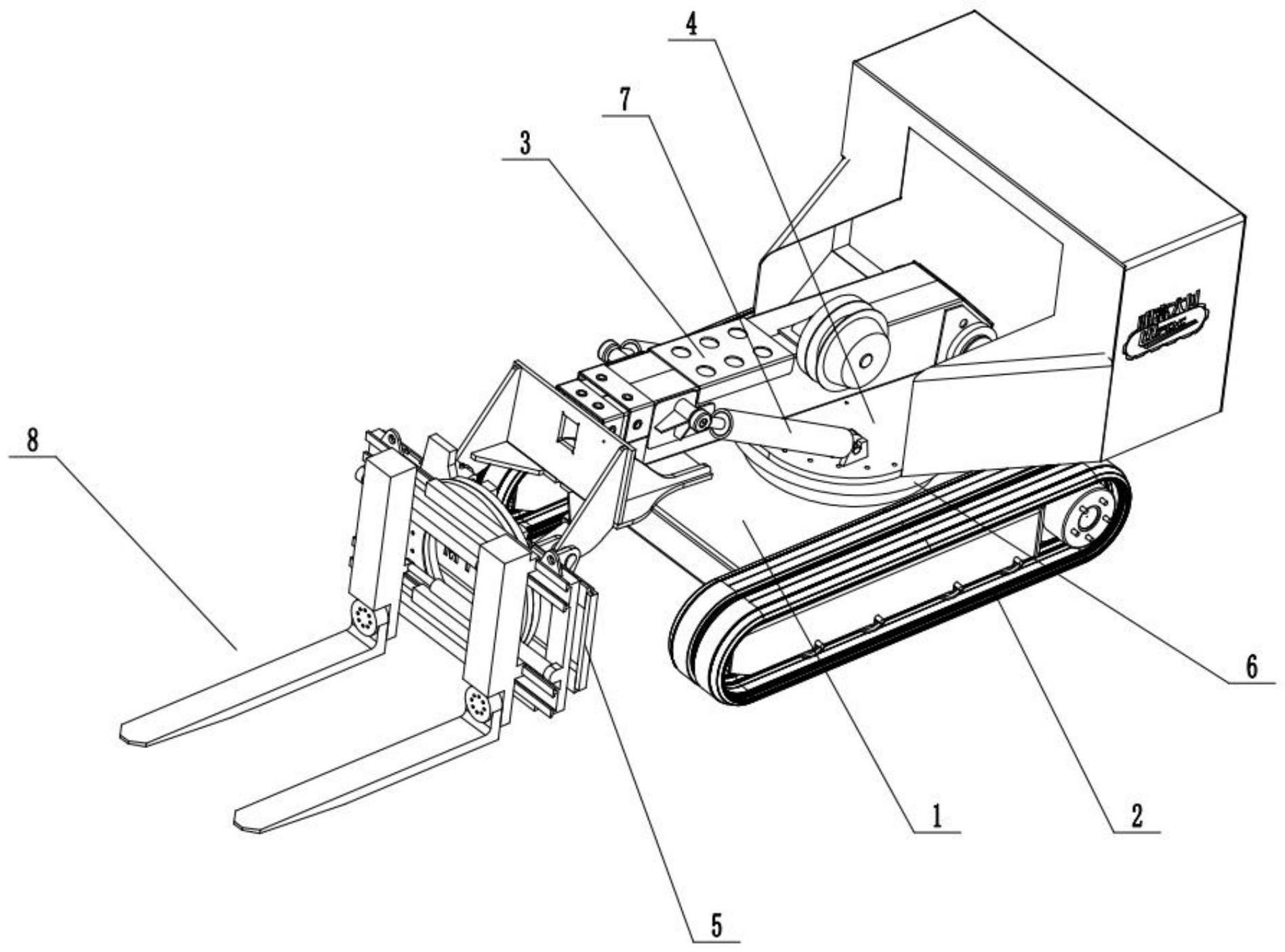
1.一种装卸机器人,包括车体(1),以及设置在车体(1)上的行走机构(2)和装卸机构,其特征在于,装卸机构包括伸缩臂(3)、安装座(4)、固定架(5)、回转驱动机构(6)和第一驱动装置(7),安装座(4)与车体(1)通过回转驱动机构(6)转动连接,回转驱动机构(6)能够驱动安装座(4)在水平方向上实现360°转动,伸缩臂(3)的底端与安装座(4)铰接配合,第一驱动装置(7)能够驱动伸缩臂(3)绕铰接处转动,固定架(5)设置在伸缩臂(3)的上端,且固定架(5)上可拆卸的安装有用于装卸货物的属具(8)。
2.根据权利要求1所述的一种装卸机器人,其特征在于,所述回转驱动机构(6)包括回转支承(9)和蜗杆驱动装置(10),回转支承(9)的外圈(11)与安装座(4)底部固定连接,回转支承(9)的内圈(12)与车体(1)固定连接,外圈(11)设置具有与蜗杆驱动装置(10)传动配合的啮合部(13)。
3.根据权利要求1所述的一种装卸机器人,其特征在于,所述固定架(5)与伸缩臂(3)的端部铰接,固定架(5)上连接有第二驱动装置(14),第二驱动装置(14)能够驱动固定架(5)绕铰接处转动。
4.根据权利要求1所述的一种装卸机器人,其特征在于,所述属具(8)为货叉装置,货叉装置包括安装架(15)以及设置在安装架(15)上两个货叉臂(16),安装架(15)与固定架(5)可拆卸连接。
5.根据权利要求4所述的一种装卸机器人,其特征在于,所述安装架(15)与固定架(5)之间通过回转驱动机构(6)连接,以使得安装架(15)能够相对固定架(5)360°转动。
6.根据权利要求4所述的一种装卸机器人,其特征在于,所述货叉臂(16)通过滑座(17)与安装架(15)滑动连接,且滑座(17)连接有第三驱动装置(18),第三驱动装置(18)能够驱动两滑座(17)相互朝向或者相互背向运动,以调节两货叉臂(16)之间的距离。
7.根据权利要求6所述的一种装卸机器人,其特征在于,所述货叉臂(16)的端部通过轴体与滑座(17)转动连接,且滑座(17)上设置有定位孔,货叉臂(16)的端部环绕轴体均布设置有若干调节孔(19),调节孔(19)能够与定位孔对应,通过定位销插入调节孔(19)和定位孔,能够将货叉臂(16)锁定在滑座(17)上。
8.根据权利要求1所述的一种装卸机器人,其特征在于,所述伸缩臂(3)包括大臂(20)、中臂(21)、小臂(22),大臂(20)的一端与车体(1)铰接,另一端与中臂(21)的一端插接配合,小臂(22)的一端与中臂(21)远离大臂(20)的一端插接配合,另一端安装有固定架(5),大臂(20)与中臂(21),以及中臂(21)与小臂(22)之间分别通过油缸(23)连接。
9.根据权利要求1所述的一种装卸机器人,其特征在于,所述行走结构为履带式行走机构(2)。
10.根据权利要求9所述的一种装卸机器人,其特征在于,所述车体(1)包括左车架(24)、右车架(25)、底板(29)和第四驱动装置(28),左车架(24)和右车架(25)上均设置有滑轴(26),底板(29)的底部设置有滑套(27),滑轴(26)与滑套(27)能够相互插接且滑动配合,第四驱动装置(28)能够驱动滑轴(26)沿滑套(27)滑动,以调节左车架(24)与右车架(25)之间的距离,回转驱动机构(6)设置在底板(29)上。
技术总结
本发明涉及机器人技术领域,其具体公开了一种装卸机器人,包括车体,以及设置在车体上的行走机构和装卸机构,装卸机构包括伸缩臂、安装座、固定架、回转驱动机构和第一驱动装置,安装座与车体通过回转驱动机构转动连接,回转驱动机构能够驱动安装座在水平方向上实现360°转动,伸缩臂的底端与安装座铰接配合,第一驱动装置能够驱动伸缩臂绕铰接处转动,固定架设置在伸缩臂的上端,且固定架上可拆卸的安装有用于装卸货物的属具。本发明的一种装卸机器人,转向灵活,方便伸缩臂在不同方向上进行装卸操作。
技术研发人员:王明富,韦炽海,庾世松,奉立涛,王艺霖,曾起
受保护的技术使用者:桂林明富机器人科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!