本发明涉及钢结构构件输运辊道设备,具体为一种接触力可控的来料检测随形支撑辊道。
背景技术:
1、钢结构h型和t型构件的生产流程为:“板材剪裁→翼板、腹板初步拼装对中→组立定位精确对中拼装→翼板、腹板焊接→焊接变形矫正→成品输出”。涉及的主要生产设备有:用于板材剪裁的切割设备、具备扶正功能的输入辊道(用于将剪裁好的板材按构件要求进行初步拼装和输运)、组立设备(用于将初步拼装的翼板和腹板按照h型或t型的精度要求进行定位和拼装)、焊接设备(用于组立拼装后板材的焊接)、矫正设备(用于矫正翼板边缘由于焊接热而产生的翘曲变形)、输出辊道(用于h型或t型构件的成品输运)。有些生产厂上述设备是相对独立的,有些生产厂上述部分设备集成在一起形成具有一定自动化程度的产线。
2、无论是相对独立的生产设备还是集成化的一体产线,在矫正设备完成矫形后,构件的输出辊道是生产过程中必不可少的设备。如图1所示为h型和t型构件示意图,h型或t型均由翼板和腹板组成。h型或t型构件在完成矫形从矫正设备输出后,沿着构件长度方向会有一定程度的翘头变形(如图2所示),在矫正设备的输出端设置普通辊道时由于构件的翘头难以保证辊筒与构件有效接触,变形的构件与矫正设备形成了悬臂梁结构增加了恶化了矫正设备的工况条件,缩短其寿命,另外辊筒与构件不能有效接触也使得构件的输运效率大大降低。基于此,在矫正机输出端设置具备随构件翘头变形的可升降支撑辊道(即随形支撑辊道)可有效解决上述问题。
3、目前可查的具备可调支撑的辊道或钢结构构件输运辊道,主要存在如下不足:
4、1)辊筒多由电动机通过链传动、带传动或齿轮传动驱动,使得传动链较长、结构较为复杂,模块化程度低,可扩展性不强;
5、2)不具备物料是否到达辊道的检测功能,依靠作业人员观察来作出是否启动支撑辊筒和动力输运,增加作业人力负担,不利于自动化程度的提高;
6、3)不具备可调支撑辊筒与构件接触压力的检测功能,依靠作业人员的观察判断是否有效支撑了构件,容易构件容易产生过支撑的次生变形,增加作业人力负担,且不利于自动化程度的提高。
7、针对上述不足问题,需要设计一种接触力可控的来料检测随形支撑辊道来解决上述出现的问题。
技术实现思路
1、鉴于现有技术中存在的上述问题,本发明的主要目的在于提供一种接触力可控的来料检测随形支撑辊道来解决上述出现辊筒多由电动机通过链传动、带传动或齿轮传动驱动,使得传动链较长、结构较为复杂,模块化程度低,可扩展性不强;不具备物料是否到达辊道的检测功能,依靠作业人员观察来作出是否启动支撑辊筒和动力输运,增加作业人力负担,不利于自动化程度的提高;不具备可调支撑辊筒与构件接触压力的检测功能,依靠作业人员的观察判断是否有效支撑了构件,容易构件容易产生过支撑的次生变形,增加作业人力负担,且不利于自动化程度的提高的问题。
2、为实现上述目的,本发明提供如下技术方案:一种接触力可控的来料检测随形支撑辊道,包括机架主体,所述机架主体的顶部安装有随形支撑动力单元,所述随形支撑动力单元的上方安装有随形支撑左摆臂,所述随形支撑动力单元的上方且远离随形支撑左摆臂的一侧安装有随形支撑右摆臂,所述随形支撑左摆臂与随形支撑右摆臂之间转动连接有固定轴辊筒组件,所述随形支撑左摆臂与随形支撑右摆臂之间且远离固定轴辊筒组件的一侧安装有随形支撑动力辊筒,所述固定轴辊筒组件与随形支撑动力辊筒之间安装有摆臂驱动横梁,所述摆臂驱动横梁的一侧安装有摆臂驱动铰链架,所述摆臂驱动铰链架远离摆臂驱动横梁的一侧安装有摆臂驱动铰销轴,所述机架主体的内部位于随形支撑动力辊筒的下方安装有来料检测传感器。
3、优选的,所述机架主体包括机架立柱和固定轴辊筒座板,两个所述机架立柱之间均安装有机架下纵梁,所述机架下纵梁的上方且位于机架立柱的顶部均安装有机架上纵梁,两个所述机架下纵梁之间均安装有机架下横梁,所述机架下横梁的上方且位于机架立柱的顶部均安装有机架上横梁,所述机架上纵梁的顶部均安装有固定轴辊筒座板,两个所述机架下纵梁之间且远离机架下横梁的一侧安装有动力单元安装底座。
4、优选的,所述固定轴辊筒组件包括固定轴辊筒轴承座和固定轴辊筒主体,所述随形支撑左摆臂与摆臂驱动横梁之间转动连接有固定轴辊筒主体,所述固定轴辊筒主体的两端均安装有固定轴主体,所述固定轴主体远离固定轴辊筒主体的一侧均连接有固定轴辊筒轴承座,所述固定轴主体与固定轴辊筒轴承座之间均安装有摆臂轴承,所述随形支撑左摆臂的一端套装在其中一个摆臂轴承上,所述随形支撑右摆臂的一端套装在另外一个摆臂轴承上。
5、优选的,所述随形支撑动力辊筒包括支撑辊筒主体和支撑辊筒液压马达,所述随形支撑左摆臂与随形支撑右摆臂之间且远离固定轴辊筒组件的一侧安装有支撑辊筒主体,所述支撑辊筒主体的一侧安装有支撑辊筒动力轴,所述支撑辊筒主体的另一侧安装有支撑辊筒从动轴,所述支撑辊筒动力轴和支撑辊筒从动轴的外侧均安装有支撑辊筒轴承,其中一个所述支撑辊筒轴承与随形支撑左摆臂相连接,另外一个所述支撑辊筒轴承与随形支撑右摆臂相连接,所述随形支撑右摆臂远离随形支撑动力辊筒的一侧安装有支撑辊筒液压马达,所述支撑辊筒液压马达的输出端与支撑辊筒动力轴固定连接,所述支撑辊筒从动轴的一侧安装有压盖,所述随形支撑左摆臂的内部且位于压盖的一侧安装有卡环。
6、优选的,所述随形支撑动力单元包括动力单元支座主体和动力单元支座销轴,所述机架主体的顶部安装有动力单元支座主体,所述动力单元支座主体的内部通过动力单元支座销轴转动连接有动力单元液压缸,所述动力单元液压缸的输出端连接有接触力检测传感器,所述接触力检测传感器远离动力单元液压缸的一端安装有液压缸球铰接头,所述动力单元液压缸通过尾端耳座安装在动力单元支座主体上。
7、优选的,所述固定轴辊筒轴承座与动力单元支座主体相连接,所述随形支撑左摆臂位于固定轴辊筒组件的一侧,所述随形支撑右摆臂位于固定轴辊筒组件的另一侧,所述随形支撑动力单元通过动力单元支座主体安装在动力单元安装底座上,所述摆臂驱动铰销轴穿过摆臂驱动铰链架和液压缸球铰接头形成铰链连接。
8、优选的,所述来料检测传感器安装在其中一个机架上横梁上表面。
9、与现有技术相比,本发明的有益效果是:
10、1.设置有机架主体,通过模块化设计,可根据构件长度和变形规律进行多组扩展,随形支撑动力辊筒集成支撑辊筒液压马达结构紧凑,实现构件在随形支撑状态下的主动输运;
11、2.设置有来料检测传感器,用于检测构件是否已经到达辊道,并将信号传送给控制系统自动控制构件支撑输运过程,取代了人工观察手动操作的作业方式,提升了自动化程度;
12、3.设置接触力检测传感器,用于检测随形支撑动力辊筒与构件的接触压力,以不产生构件再生变形为约束设置接触压力范围,实现随形支撑动力辊筒对构件接触压力可控的高效支撑,同时取代了人工观察辊筒与构件接触情况的作业方式,提升了自动化程度。
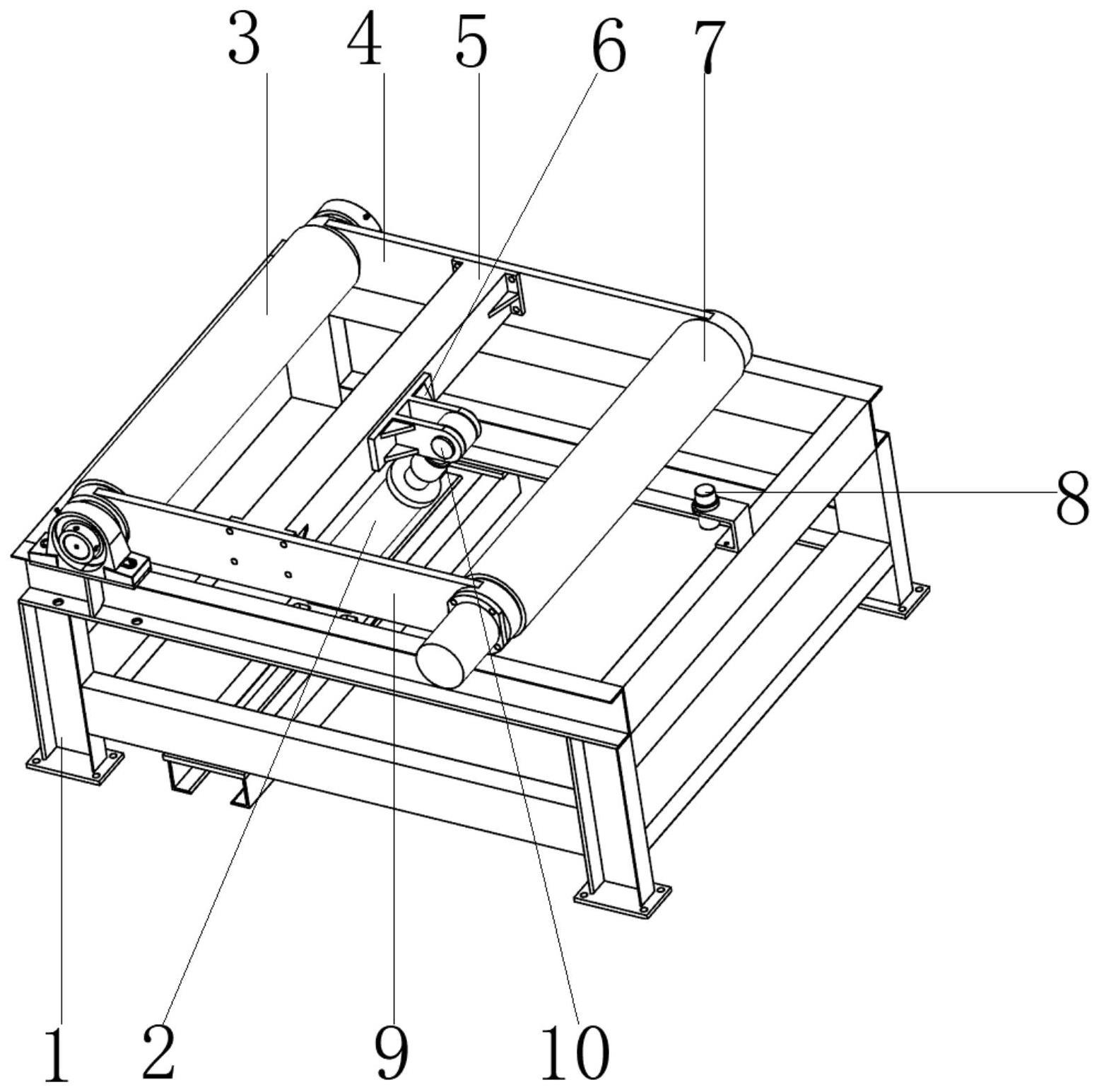
技术特征:1.一种接触力可控的来料检测随形支撑辊道,包括机架主体(1),其特征在于:所述机架主体(1)的顶部安装有随形支撑动力单元(2),所述随形支撑动力单元(2)的上方安装有随形支撑左摆臂(4),所述随形支撑动力单元(2)的上方且远离随形支撑左摆臂(4)的一侧安装有随形支撑右摆臂(9),所述随形支撑左摆臂(4)与随形支撑右摆臂(9)之间转动连接有固定轴辊筒组件(3),所述随形支撑左摆臂(4)与随形支撑右摆臂(9)之间且远离固定轴辊筒组件(3)的一侧安装有随形支撑动力辊筒(7),所述固定轴辊筒组件(3)与随形支撑动力辊筒(7)之间安装有摆臂驱动横梁(5),所述摆臂驱动横梁(5)的一侧安装有摆臂驱动铰链架(6),所述摆臂驱动铰链架(6)远离摆臂驱动横梁(5)的一侧安装有摆臂驱动铰销轴(10),所述机架主体(1)的内部位于随形支撑动力辊筒(7)的下方安装有来料检测传感器(8)。
2.根据权利要求1所述的接触力可控的来料检测随形支撑辊道,其特征在于:所述机架主体(1)包括机架立柱(101)和固定轴辊筒座板(102),两个所述机架立柱(101)之间均安装有机架下纵梁(107),所述机架下纵梁(107)的上方且位于机架立柱(101)的顶部均安装有机架上纵梁(106),两个所述机架下纵梁(107)之间均安装有机架下横梁(104),所述机架下横梁(104)的上方且位于机架立柱(101)的顶部均安装有机架上横梁(103),所述机架上纵梁(106)的顶部均安装有固定轴辊筒座板(102),两个所述机架下纵梁(107)之间且远离机架下横梁(104)的一侧安装有动力单元安装底座(105)。
3.根据权利要求1所述的接触力可控的来料检测随形支撑辊道,其特征在于:所述固定轴辊筒组件(3)包括固定轴辊筒轴承座(301)和固定轴辊筒主体(302),所述随形支撑左摆臂(4)与摆臂驱动横梁(5)之间转动连接有固定轴辊筒主体(302),所述固定轴辊筒主体(302)的两端均安装有固定轴主体(304),所述固定轴主体(304)远离固定轴辊筒主体(302)的一侧均连接有固定轴辊筒轴承座(301)。
4.根据权利要求3所述的接触力可控的来料检测随形支撑辊道,其特征在于:所述固定轴主体(304)与固定轴辊筒轴承座(301)之间均安装有摆臂轴承(303),所述随形支撑左摆臂(4)的一端套装在其中一个摆臂轴承(303)上,所述随形支撑右摆臂(9)的一端套装在另外一个摆臂轴承(303)上。
5.根据权利要求1所述的接触力可控的来料检测随形支撑辊道,其特征在于:所述随形支撑动力辊筒(7)包括支撑辊筒主体(701)和支撑辊筒液压马达(702),所述随形支撑左摆臂(4)与随形支撑右摆臂(9)之间且远离固定轴辊筒组件(3)的一侧安装有支撑辊筒主体(701),所述支撑辊筒主体(701)的一侧安装有支撑辊筒动力轴(704),所述支撑辊筒主体(701)的另一侧安装有支撑辊筒从动轴(705),所述支撑辊筒动力轴(704)和支撑辊筒从动轴(705)的外侧均安装有支撑辊筒轴承(703),其中一个所述支撑辊筒轴承(703)与随形支撑左摆臂(4)相连接,另外一个所述支撑辊筒轴承(703)与随形支撑右摆臂(9)相连接。
6.根据权利要求5所述的接触力可控的来料检测随形支撑辊道,其特征在于:所述随形支撑右摆臂(9)远离随形支撑动力辊筒(7)的一侧安装有支撑辊筒液压马达(702),所述支撑辊筒液压马达(702)的输出端与支撑辊筒动力轴(704)固定连接,所述支撑辊筒从动轴(705)的一侧安装有压盖(707),所述随形支撑左摆臂(4)的内部且位于压盖(707)的一侧安装有卡环(706)。
7.根据权利要求3所述的接触力可控的来料检测随形支撑辊道,其特征在于:所述随形支撑动力单元(2)包括动力单元支座主体(201)和动力单元支座销轴(202),所述机架主体(1)的顶部安装有动力单元支座主体(201),所述动力单元支座主体(201)的内部通过动力单元支座销轴(202)转动连接有动力单元液压缸(203)。
8.根据权利要求7所述的接触力可控的来料检测随形支撑辊道,其特征在于:所述动力单元液压缸(203)的输出端连接有接触力检测传感器(204),所述接触力检测传感器(204)远离动力单元液压缸(203)的一端安装有液压缸球铰接头(205),所述动力单元液压缸(203)通过尾端耳座安装在动力单元支座主体(201)上。
9.根据权利要求3所述的接触力可控的来料检测随形支撑辊道,其特征在于:所述固定轴辊筒轴承座(301)与动力单元支座主体(201)相连接,所述随形支撑左摆臂(4)位于固定轴辊筒组件(3)的一侧,所述随形支撑右摆臂(9)位于固定轴辊筒组件(3)的另一侧,所述随形支撑动力单元(2)通过动力单元支座主体(201)安装在动力单元安装底座(105)上,所述摆臂驱动铰销轴(10)穿过摆臂驱动铰链架(6)和液压缸球铰接头(205)形成铰链连接。
10.根据权利要求2所述的接触力可控的来料检测随形支撑辊道,其特征在于:所述来料检测传感器(8)安装在其中一个机架上横梁(103)上表面。
技术总结本发明公开了一种接触力可控的来料检测随形支撑辊道,涉及钢结构构件输运辊道设备技术领域,包括机架主体,所述机架主体的顶部安装有随形支撑动力单元,所述随形支撑动力单元的上方安装有随形支撑左摆臂,本发明有益增效:设置有机架主体,随形支撑动力辊筒集成支撑辊筒液压马达结构紧凑,实现构件在随形支撑状态下的主动输运;设置有来料检测传感器,并将信号传送给控制系统自动控制构件支撑输运过程,取代了人工观察手动操作的作业方式,提升了自动化程度;设置接触力检测传感器,实现随形支撑动力辊筒对构件接触压力可控的高效支撑,同时取代了人工观察辊筒与构件接触情况的作业方式,提升了自动化程度。
技术研发人员:李博,刘民杰
受保护的技术使用者:洛阳豫正金属结构有限公司
技术研发日:技术公布日:2024/1/15