一种配电设备搬运方法、装置、设备及存储介质与流程
本发明涉及搬运机器人技术,尤其涉及一种配电设备搬运方法、装置、设备及存储介质。
背景技术:
1、搬运机器人为应用机器人运动轨迹实现代替人工搬运的自动化产品。
2、对于配电房干式变压器、配电柜搬运机器人在搬运过程引入自动化的控制后,再搬运过程中如果存在干式变压器或配电柜不平衡的情况,可能会导致干式变压器或配电柜掉落,导致设备受损。
技术实现思路
1、本发明提供一种配电设备搬运方法、装置、设备及存储介质,降低在搬运过程中配电设备掉落的风险,提高安全性。
2、第一方面,本发明提供了一种配电设备搬运方法,基于搬运机器人,包括:
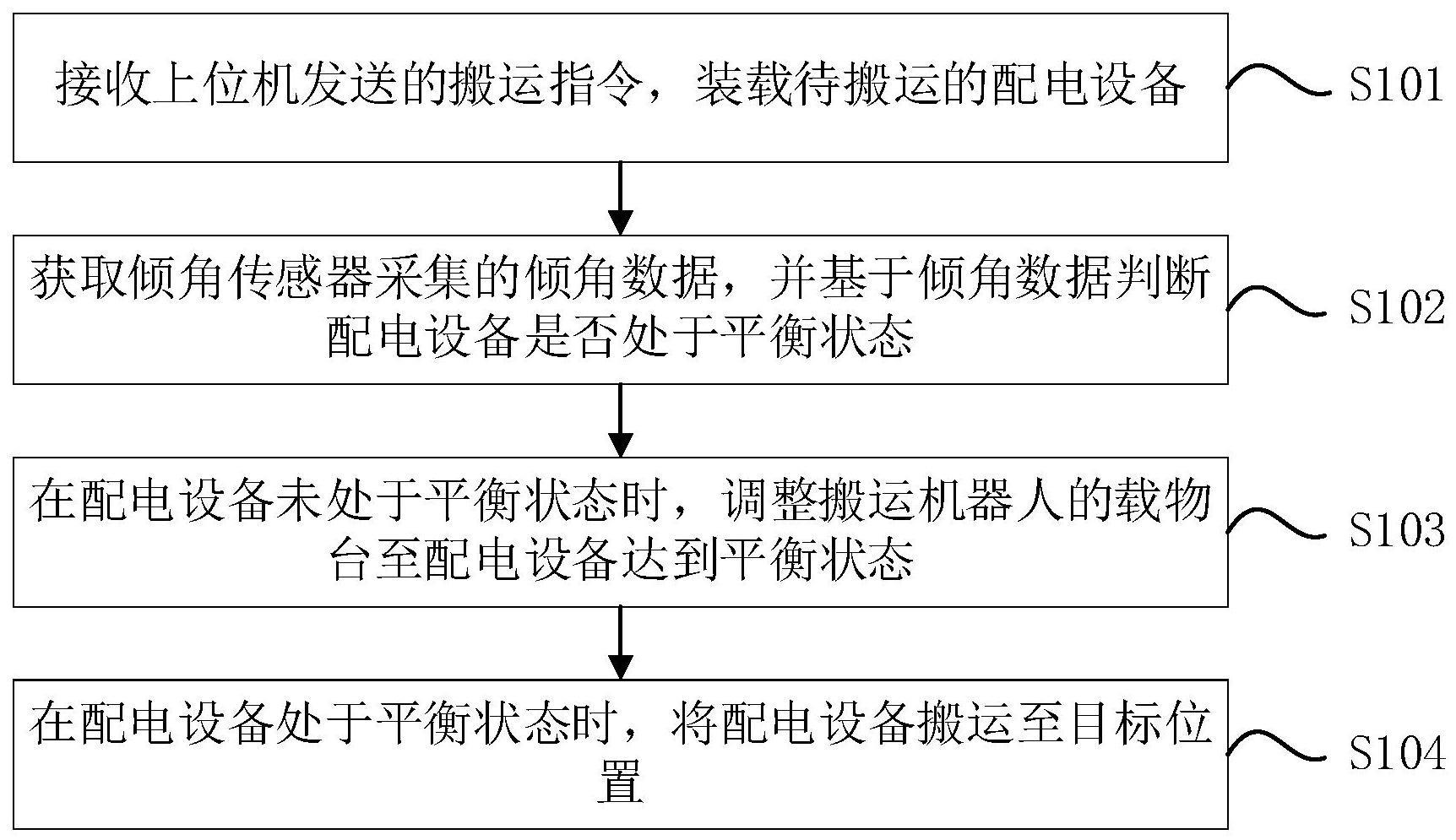
3、接收上位机发送的搬运指令,装载待搬运的配电设备;
4、获取倾角传感器采集的倾角数据,并基于所述倾角数据判断所述配电设备是否处于平衡状态;
5、在所述配电设备未处于平衡状态时,调整所述搬运机器人的载物台至所述配电设备达到平衡状态;
6、在所述配电设备处于平衡状态时,将所述配电设备搬运至目标位置。
7、可选的,所述搬运机器人设置有第一倾角传感器和第二倾角传感器,基于所述倾角数据判断所述配电设备是否处于平衡状态,包括:
8、基于第一倾角传感器的倾角数据判断所述配电设备是否绕水平面内第一轴线倾斜;
9、基于第二倾角传感器的倾角数据判断所述配电设备是否绕水平面内第二轴线倾斜,其中,第一轴线与第二轴线垂直;
10、若所述配电设备不存在绕水平面内第一轴线倾斜,且不存在绕水平面内第二轴线倾斜,则判断所述配电设备处于平衡状态;
11、若所述配电设备存在绕水平面内第一轴线倾斜,或存在绕水平面内第二轴线倾斜,则判断所述配电设备未处于平衡状态。
12、可选的,在所述配电设备处于平衡状态时,将所述配电设备搬运至目标位置,包括:
13、从所述搬运指令中解析出起点位置和目标位置;
14、基于所述起点位置、目标位置和预存的全局地图,规划从所述起点位置至所述目标位置的移动路径;
15、按照所述移动路径移动,将所述配电设备搬运至目标位置。
16、可选的,基于所述起点位置、目标位置和预存的全局地图,规划从所述起点位置至所述目标位置的移动路径,包括:
17、将所述全局地图栅格化,得到由多个节点组成的栅格化地图;
18、确定所述起点位置和目标位置所在的节点;
19、基于a*算法搜索从所述起点位置所在的节点至所述目标位置所在的节点的最短路径作为移动路径。
20、可选的,在按照所述移动路径移动,将所述配电设备搬运至目标位置的过程中,还包括:
21、获取环境感应传感器采集的局部环境信息;
22、基于所述局部环境信息判断所述搬运机器人的前方是否存在新增的障碍物;
23、若是,则以所述搬运机器人当前位置为起点位置,重新规划至所述目标位置的移动路径。
24、可选的,在将所述配电设备搬运至目标位置之后,还包括:
25、获取激光传感器采集的距离信息;
26、基于所述距离信息判断所述配电设备是否处于放置预备位置;
27、若所述配电设备未处于放置预备位置,则调整所述搬运机器人的载物台的至所述配电设备处于放置预备位置;
28、若所述配电设备处于放置预备位置,则卸载所述配电设备。
29、可选的,在卸载所述配电设备之后,还包括:
30、获取接触传感器回传的反馈信息;
31、基于所述反馈信息判断所述配电设备是否放置成功;
32、若未放置成功,则发出警报信息。
33、第二方面,本发明还提供了一种配电设备搬运装置,基于搬运机器人,包括:
34、指令接收模块,用于接收上位机发送的搬运指令,装载待搬运的配电设备;
35、平衡判断模块,用于获取倾角传感器采集的倾角数据,并基于所述倾角数据判断所述配电设备是否处于平衡状态;
36、平衡调整模块,用于在所述配电设备未处于平衡状态时,调整所述搬运机器人的载物台至所述配电设备达到平衡状态;
37、设备搬运模块,用于在所述配电设备处于平衡状态时,将所述配电设备搬运至目标位置。
38、第三方面,本发明还提供了一种电子设备,包括:
39、一个或多个处理器;
40、存储器,用于存储一个或多个程序;
41、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如本发明第一方面提供的配电设备搬运方法。
42、第四方面,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明第一方面提供的配电设备搬运方法。
43、本发明提供的配电设备搬运方法,包括:接收上位机发送的搬运指令,装载待搬运的配电设备,获取倾角传感器采集的倾角数据,并基于倾角数据判断配电设备是否处于平衡状态,在配电设备未处于平衡状态时,调整搬运机器人的载物台至配电设备达到平衡状态,在配电设备处于平衡状态时,将配电设备搬运至目标位置,在装载配电设备后,通过倾角传感器的倾角数据判断配电设备是否处于平衡状态,在配电设备未处于平衡状态时,调整搬运机器人的载物台至配电设备达到平衡状态,降低在搬运过程中配电设备掉落的风险,提高了安全性。
44、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种配电设备搬运方法,其特征在于,基于搬运机器人,包括:
2.根据权利要求1所述的配电设备搬运方法,其特征在于,所述搬运机器人设置有第一倾角传感器和第二倾角传感器,基于所述倾角数据判断所述配电设备是否处于平衡状态,包括:
3.根据权利要求1所述的配电设备搬运方法,其特征在于,在所述配电设备处于平衡状态时,将所述配电设备搬运至目标位置,包括:
4.根据权利要求3所述的配电设备搬运方法,其特征在于,基于所述起点位置、目标位置和预存的全局地图,规划从所述起点位置至所述目标位置的移动路径,包括:
5.根据权利要求3所述的配电设备搬运方法,其特征在于,在按照所述移动路径移动,将所述配电设备搬运至目标位置的过程中,还包括:
6.根据权利要求1-5任一所述的配电设备搬运方法,其特征在于,在将所述配电设备搬运至目标位置之后,还包括:
7.根据权利要求6所述的配电设备搬运方法,其特征在于,在卸载所述配电设备之后,还包括:
8.一种配电设备搬运装置,其特征在于,基于搬运机器人,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一所述的配电设备搬运方法。
技术总结
本发明公开了一种配电设备搬运方法、装置、设备及存储介质。方法包括:接收上位机发送的搬运指令,装载待搬运的配电设备,获取倾角传感器采集的倾角数据,并基于倾角数据判断配电设备是否处于平衡状态,在配电设备未处于平衡状态时,调整搬运机器人的载物台至配电设备达到平衡状态,在配电设备处于平衡状态时,将配电设备搬运至目标位置,在装载配电设备后,通过倾角传感器的倾角数据判断配电设备是否处于平衡状态,在配电设备未处于平衡状态时,调整搬运机器人的载物台至配电设备达到平衡状态,降低在搬运过程中配电设备掉落的风险,提高了安全性。
技术研发人员:张育宾,卢俏玲,陈少锋,邓剑辉,袁灿培,袁汉诚,万晓飞,李玉龙
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!